
基于贝塞尔曲线的波形重跟踪改进算法
2022-10-11 12:32吴斌李兴
北京测绘 2022年9期
吴 斌 李 兴
(山东科技大学 测绘与空间信息学院, 山东 青岛 266590)
0 引言
内陆湖泊作为出海水以及冰川以外的重要水资源,在维护生态平衡、减轻洪涝灾害以及满足日常生活需求等方面发挥着不可替代的作用[1]。湖泊范围的扩张与缩减、水位的上升与下降以及带来生态环境的变化是全球以及局部气候或者构造共同的结果。湖泊的变化与人的生活息息相关,它可以反映一个人地区的气候变化、环境变化、湿度变化,降水量变化,因此有效监测湖泊对局部地区的变化有重要的意义[2]。
中国有众多的内陆水资源,面对复杂的地理环境以及气候变化,如何在雨季和旱季很好地监测湖泊尤为重要。反映湖泊变化最直接的指标就是水位的变化,监测水位变化可以通过建设水文站,但水文站存在一定程度上的缺陷。一方面不是所有的河流都适合建立水文站,例如,青藏高原的许多湖泊,另一方面水文站是呈点状分布的,对连续水位的变化监测并没有那么有效。因此采用卫星测高,即雷达高度计可以有效解决以上问题,国内外众多学者利用雷达高度计对内陆湖泊进行监测[3-4]。雷达高度计测高过程中存在误差,需要进行距离改正,改正的过程称为波形重跟踪。大部分重跟踪方法更多的应用在海冰以及远海,但近年来越来越多学者将算法应用于近海以及内陆湖泊[5-6]。Hwang[7]提出一种改进的阈值算法对台湾的近海波形进行重跟踪,最终得到的海面高程精度好于先前的海面高程结果。Tseng[8]引入一种统计方法,通过引入深海海洋波形俩修复近海破损的波形进而保存更多波形,最后利用阈值法等算法来反演出精度更高的海平面高程。高永刚[9]在研究内陆湖泊时提出一种改进波形重构算法,利用该算法对国内湖泊研究过程中均取得较好的结果。以上算法大多是基于物理参数或者是传统的阈值法和传统重心偏移(the Offset centre of gravity,OCOG)等[10-11],在Lee[12]和Deng[13]有关于物理参数法重跟踪的表述,物理参数法存在着解算复杂度高,传统阈值法的结果精度相对较差,因此越来越多的学者提出一种波形拟合重跟踪算法用于海冰以及海水的参数反演。本文的算法是在贝塞尔曲线的基础上,提出的一种基于主波峰提取的贝塞尔曲线拟合算法,曲线拟合法波形重跟踪原始的贝塞尔曲线对于波形复杂程度较低的海冰波形具有较好的拟合效果,在Shen[14]的文章中有所体现,而湖泊存在比较复杂的波形,需要首先提取出主波峰,然后拟合出准确的波形前缘部分可以更好地用于波形重跟踪。
1 波形重跟踪方法
1.1 水位反演原理
星载雷达高度计主动发射脉冲经地表反射后由接收机接受后,测量得到发射脉冲和接受脉冲连个时刻的时间差Δt,从而确定卫星质心到星下点的距离,最后得处相应的高度,距离计算如式(1)所示。
(1)
式中,R是卫星与地面点的距离;c为光速(299 792 458 m/s)。
回波波形的上升部分对应为前缘,前缘的半功率点对应的采样时间对应时间延迟,借此可以计算出水面高度信息。雷达高度计在经过海面或者湖面以外的地物时波形会发生变形,从而导致原本的重跟踪点与实际跟踪点有差别,进而会影响星地距离的计算。因此需要采用合适的方法对波形进行重跟踪,进而获得改正值以对高度计到地物的距离进行改正,改正计算如式(2)、(3)所示。
式中,Crt、Cnt分别为改正后的重跟踪点和原定的重跟踪点;t为脉冲宽度;Rc为改正后距离;R为原始测得的卫星到星下点的距离。Cnt在低分辨率模式(low resolution mode,LRM)下一般取63,t一般取3.125 ns。
1.2 改进的贝塞尔曲线波形重跟踪法
本文采用的波形重跟踪方法是改进的贝塞尔曲线拟合法波形重跟踪,改进的贝塞尔曲线拟合法波形重跟踪增加了一个主波峰提取的流程,主波峰提取[12]如式(4)所示。

(8)
式中,B是模拟波形的功率值;Pi代表参数,需要拟合产生;t为坐标的横坐标值。
经过波形重跟踪后可以得到距离的改正值,而在卫星测高中还会受到对流层、潮汐以及电离层等的影响,因此下一步需要对距离进行干湿对流层校正、潮汐改正、电离层改正以及海况偏差校正等,相关的改正参数在L1b数据中均可以得到,这里将所有的改正值得和记为ΔR。最终水位反演的计算如式(9)所示。
(9)
式中,H代表最终的水位;Halt为测高卫星的高度;Hgeoid为大地水准面的高度。
2 实验与结果分析
2.1 实验研究区及实验数据
本文的研究区域巢湖在安徽省中部,是位于长江中下游的五大淡水湖之一,东西长55 km、南北宽21 km,湖岸线周长176 km,平均水深2.89 m,面积约780 km2。研究区域在梅雨季节降雨严重的月份水位会大涨,本文利用过境的CryoSat-2数据对湖水水位进行监测。
本文采用的CryoSat-2雷达高度计由欧洲空间局(European Space Agency,ESA)于2010年发射,该卫星是Ku波段的干涉雷达高度计,主要用于极地海冰监测,进而用于分析全球气候变化与极地海冰变化的联系等等。卫星总共有三种工作模式,分别是低分辨率指向星下点的高度计测量模式(LRM),合成孔径雷达(synthetic aperture radar,SAR)测量模式以及干涉合成孔径雷达模式(SAR interferometry,SARIn)。本文采用经过研究区域的LRM模式下的L1b(level 1 B)数据,该数据是D基线数据以新的格式存储。实验数据采用的是8月9日足迹经过巢湖的数据,研究区域和足迹如图1所示。
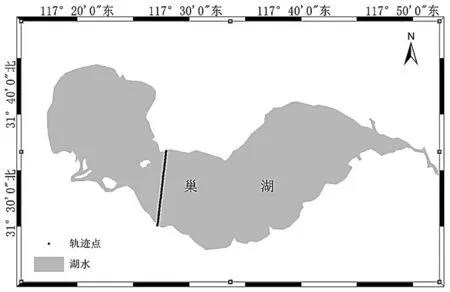
图1 研究区域
2.2 数据预处理
对于CryoSat-2雷达高度计的LRM数据下载完成之后,依据巢湖的流域范围对数据进行筛选,同时借助L1b数据中提供的地物类别帮助筛选出湖水波形。将筛选得到的数据进行进一步剔除其中受到噪声影响较为严重的波形,筛选方法是将返回波形功率值波峰出现在前20个跟踪门或者后10个跟踪门的剔除。
2.3 基于贝塞尔曲线的拟合波形
利用式(4)~式(5)提取出主波峰后,在向波形前缘和后缘分别扩展两个点后,为保证拟合的精度,将前缘向前延伸5到10个点,后缘延伸的点为主波峰峰值的80%、60%、40%、20%点处。度延伸后的波形进行分段,分段点位于波峰前缘部分峰值的20%处和80%处,波形后缘部分峰值的80%处以及20%处,对每一段进行单独的曲线拟合,拟合后的结果如图2所示。从图2可以看出,该曲线对波形前缘有很好的拟合效果,因为本文的算法关键在于波形前缘的拟合,所以对于波形后缘的拟合效果并不好,但不影响水位的反演。
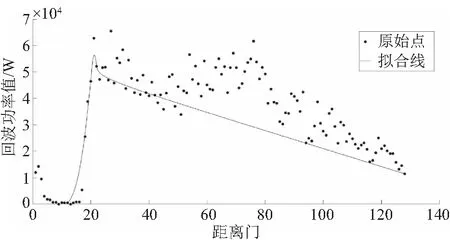
图2 贝塞尔曲线拟合结果图
2.4 实验结果分析
首先对本文算法得到的水位结果用3σ准则剔除异常值,去除异常值的目的是将明显存在测量误差的数据剔除。将本文改进波形重跟踪的算法得到的湖水水位与CryoSat-2 LRM的2级数据中大三种重跟踪算法以及实测水位数据进行对比,LRM的2级数据中包含的三种算法分别是改进的OCOG、改进的用户定制法(customer furnished item,CFI)以及伦敦大学学院法(University College London,UCL)[17]。图3中展示的为本文算法以及LRM的2级数据中的结果,横坐标的1代表本文算法,2代表改进的CFI,3代表UCL,4代表改进的OCOG。目视结果来看,改进的CFI算法的结果存在明显的异常值,本文算法的水位值分布较集中,仅低于改进的OCOG算法。在剔除异常值后发现,本文算法实际的有效观测值更多,多于改进的CFI以及UCL,与改进的OCOG算法相比有效观测值相差无几,去除异常值后的最大水位值与当天水位实测值的差值在0.12 m左右,基本上满足测量要求。
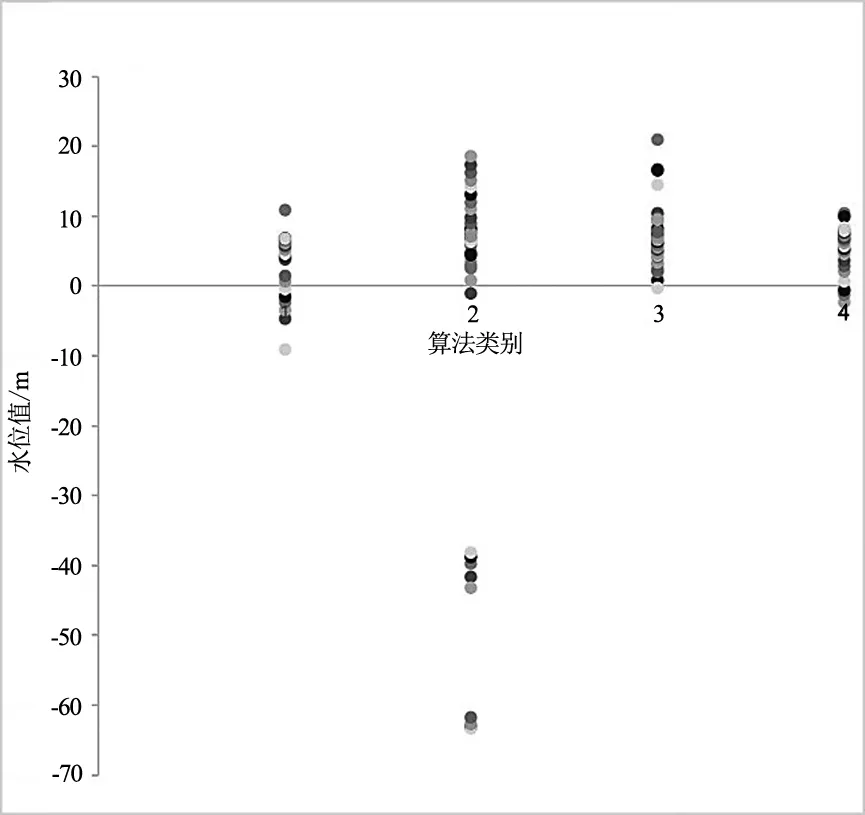
(a)去除异常值前
在比较本文算法与L2中三种算法的结果,需要评估出已知算法的精度结果,因此用已有的实测水位数据进行评估。由于实测水位数据只有单个测站点,因此将与本文轨道数据重合度最高的巢湖忠庙站水位数据作为雷达高度计各个测量点的实测数据。已知的三种算法结果与实测水位评估的结果精度如表1所示,从表1可以看出改进的OCOG算法的差值绝对值得最大值、最小值以及均方根误差都是最小,因此本文将采用此数据作为主要验证数据与本文算法进行对比。
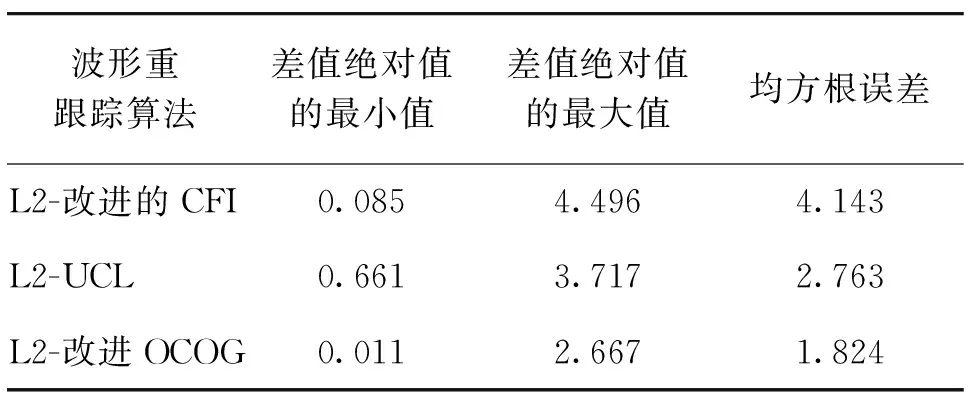
表1 L2数据中三种算法精度对比单位:m
表2展现的是本文算法以及其他两类算法与改进的OCOG算法的精度对比,从表中可以看出本文算法在绝对值差值最小值有0.081 m、绝对值差值最大值有0.870 m,均方根误差为0.770,相关系数为0.892,均优于其他两个算法。同时从水位图中可以看出本文算法与改进的OCOG算法在水位值上重合水位数量更多。所以,利用本文算法反演出的水位值具有比CFI和UCL具有更高的可信度且具有更多有效观测值。
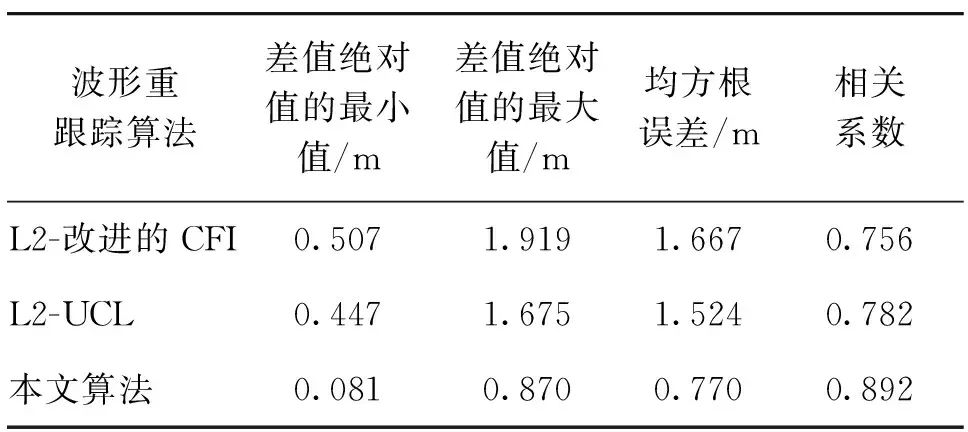
表2 本文算法与L2中算法精度对比
3 结束语
本文提出波形重跟踪算法在贝塞尔曲线的基础上,加入了主波峰提取这一步骤,更好地解决了拟合复杂的多波峰内陆湖波形这一问题,贝塞尔曲线拟合需要足够的点,因此在主波峰提取后向前缘和后缘多延伸了3到5个点以保证拟合的准确度,为保证准确找到重跟踪点,经过多次实验将重跟踪点确定为主波峰最大值的50%处。实验结果表明,本文算法可以很好地解决贝塞尔曲线拟合复杂内陆湖水波形的问题,且保存了更多的有效水位值,水位精度与现有结果相比基本满足实际测量要求。本文算法的不足之处在于无法对一些复杂受损的波形进行修复,从而反演出更多的有效观测值,另外本文算法在高原地区的实用性还有待探索,还需要更多的研究进行优化。
猜你喜欢
汽车零部件(2022年7期)2022-08-03
电子技术与软件工程(2022年6期)2022-07-07
汽车与驾驶维修(维修版)(2020年2期)2020-01-07
阅读(低年级)(2018年4期)2018-05-14
文理导航·科普童话(2017年4期)2018-02-10
价值工程(2017年31期)2018-01-17
小学阅读指南·低年级版(2017年2期)2017-03-23
汽车科技(2016年6期)2016-12-19
科教导刊·电子版(2016年3期)2016-03-14
现代电子技术(2009年8期)2009-06-25
