超大规模非平稳MIMO信道估计问题研究与设计
2022-10-11 08:52夏雨婷李汀解培中
信号处理 2022年9期
夏雨婷 李汀 解培中
(南京邮电大学通信与信息工程学院,江苏南京 210003)
1 引言
超大规模MIMO 系统是未来6G 移动通信的关键候选技术,基站端配有庞大数目的天线,较目前的大规模MIMO天线阵列中的天线数目将增加一个量级以上。超大规模MIMO系统要获得预期收益的前提是,基站可以预先获得所有用户的准确信道状态信息CSI,信道估计的方法主要包括基于导频的线性信道估计、盲或半盲信道估计三种。相比于传统的MIMO系统,超大规模MIMO系统信道估计问题所要考虑的方面更多。大尺寸的基站天线阵列与用户的近距离通信将会带来不同的信道环境:近场效应和空间非平稳性[1]。天线阵列的远场区和近场区以瑞利距离为界,随着天线数目增加,瑞利距离增大,天线阵列的近场范围也随之扩大,散射体和用户将位于大规模阵列的近场区域中,目前信道建模中通常采用的平面波将不再适用,对于超大规模天线阵列,球面波将是信道建模更合理的选择[2]。另外,当天线规模较大时,散射体反射的信号将不能到达整个天线阵列,此时超大规模MIMO 信道将呈现空间非平稳特性[3-5],需要考虑散射体或者子阵列的可见区域。
在模拟近场效应时,文献[6]证明了抛物面波模型比平面波模型精确,比球面波模型简单,相比于平面波假设的信道估计,用抛物面波假设信道估计时多了对距离的估计,同时又省去了球面波建模时需要用根式计算的复杂。并提出了抛物面波的信道估计算法,采用OMP 算法,先利用平面波模型的方法估计出角度信息,然后再用抛物面波的模型估计出距离信息。文献[7]用抛物波前代替球面波前,结果表明既可以降低用球面波前模型建模的复杂度,又可以获得与其近似的信道容量。文献[8]利用阵列信号协方差矩阵的托普利兹特性,将近场信号的二阶统计量重构成只与信号角度有关的类远场协方差矩阵,从而将角度与距离分开,用MUSIC 算法分别进行一维搜索并进行匹配。而文献[9]将角度和距离分开时,提出了降秩和降维的近场源定位算法。文献[2]在[8]的基础上,将一维参数估计问题转换为稀疏信号重构问题。文献[10]基于空间交替通用期望最大化(SAGE)算法的基本思想,首次将其用在近场散射体角度和距离的联合估计,且降低了计算复杂度。
针对超大规模MIMO 信道的非平稳,文献[11-12]中给出的测量结果表明当天线规模较大的时候,信道不能被看做平稳的,阵列天线的不同部分可能会有不同的传播环境,即阵列天线的每一部分能够观察到的散射体可能不一样,所以需要引入可见区域(visibility region,VR)这一概念。文献[13]利用YOLO 神经网络估计信道参数,并且识别散射体的可见区域,避免了基于算法的参数提取方法引入的复杂的迭代过程。文献[1]提出了一种自适应分组稀疏贝叶斯学习(AGSBL)的上行信道估计方案,对于信道向量的估计,设计了一个由一组可调超参数控制的层次先验模型,然后开发了一个变分贝叶斯算法来推断信道向量的后验概率和与先验相关的超参数,从而获得信道估计。文献[14]针对6G通信系统提出了通用的三维空时频非平稳模型,用散射簇的生灭过程动态模拟信道的非平稳,然后通过机器学习中的无监督学习算法即K-means聚类算法捕捉频率的非平稳性。
文献[15]在信道估计时同时考虑了近场效应和信道非平稳性,用散射体的坐标信息来建模信道,并将大规模的阵列分为多个子阵列,在信道建模时增加了一个选择向量来模拟信道的非平稳特性,根据散射体的可见区域,令选择向量中的元素为1 或0,并提出分别从子阵列和散射体的角度出发找可见的散射体或子阵列,建立字典,采用OMP迭代算法进行信道估计。文献[16]的信道建模在[14]的信道非平稳基础上考虑了球面波前,且提出了适用于多种场景例如车辆对车辆、高速列车通信的6G通用模型。
本文考虑非平稳大规模MIMO系统的信道估计问题,针对散射体可见区域的不同,将大规模阵列分为多个子阵列,信道建模时增加一个选择向量来描述散射体与子阵列的对应关系,即描述信道的非平稳性;球面波前假设下对散射路径的计算比较繁琐,采用球面波前的二阶近似,即用抛物面波前来简化散射路径的计算。对信道参数估计时,将角度与距离分开估计,首先为每一个子阵列分别估计角度,通过对子阵列接收信号的协方差进行特征值分解时得到的特征值大小判断,子阵列可见的散射体个数,即峰值搜索所要得到的角度个数,针对除中心子阵列以外的子阵列中天线序号的不对称性,将改变其导向矢量的形式,转换参考点进行搜索角度;其次根据已得到的角度可以得到散射体的可见子阵列区域,选择用最边缘的子阵列估计距离;最后用最小二乘法估计增益系数,从而得到估计的信道。
2 系统模型
在大规模MIMO系统中,基站端是由P=2M+1根天线组成的均匀线性阵列,相邻天线之间的距离为d,用户发送的信号沿视距路径或者被散射体反射,到达天线阵列,本文只考虑散射体的最后一跳,用户天线等效为视距路径的散射体。为了更好的描述非平稳性,将均匀线阵平均分为N个子阵列,假设每个子阵列的天线数目为Pn,Pn=P/N,每个子阵列是平稳的,即每个子阵列内的天线都可以或都不可以看见某个散射体。
如图1 中(a)所示,天线阵列由N个子阵列组成,每个子阵列内的天线数目相等,子阵列是平稳的,散射体S1发射的信号只能被子阵列1 至子阵列(N+1)/2 看到,散射体S2发射的信号只能被子阵列(N+1)/2 至子阵列N看到,且每个散射体可见的子阵列区域都是连续的。
如图1 中(b)所示,均匀线阵的天线序号为-M,-M+1,…,-1,0,1,…M-1,M,由于近场效应的存在,距离估计不可忽略,假设信号的入射方向与均匀线阵法线之间的夹角为θ,以均匀线阵即中心子阵列的中间天线为参考点,信号到中间天线的距离为r,则由余弦定理得,可得信号到达各个天线的距离rm为
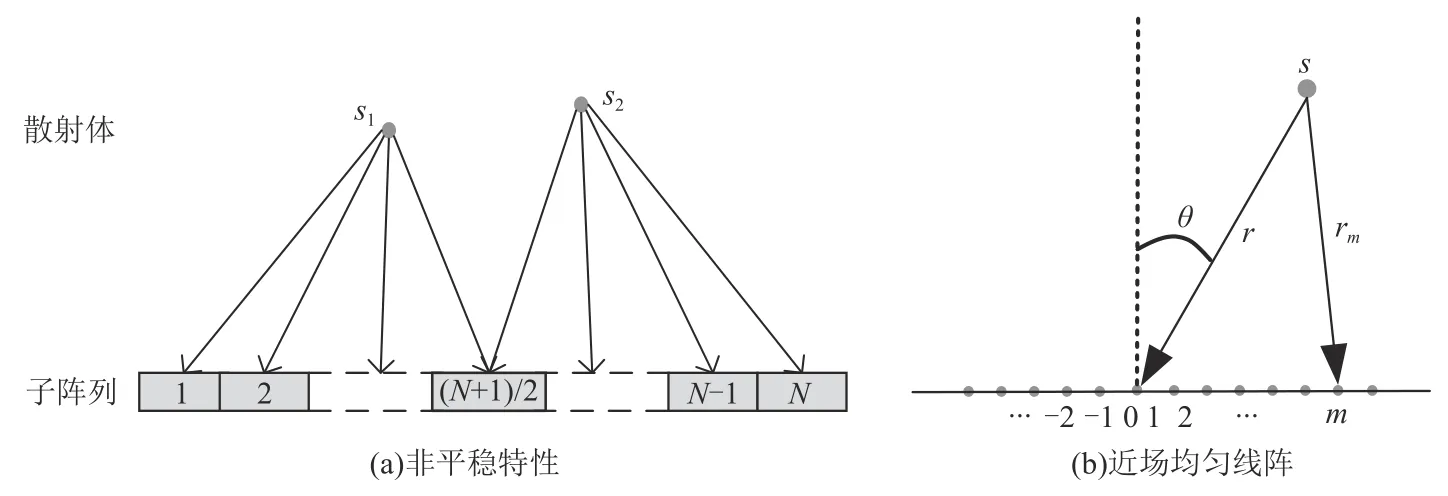
图1 非平稳信道模型Fig.1 Non-stationary channel model
所以各天线的相位差为

将其用二阶泰勒级数展开,根据公式

即可得到菲涅尔近似,相位差可以写成

化简后的相位差为:

由于信道空间非平稳性的存在,散射体反射的信号只能到达部分天线,为了非平稳性,本文增加了一个选择向量P(φs),因此将信道表示为:

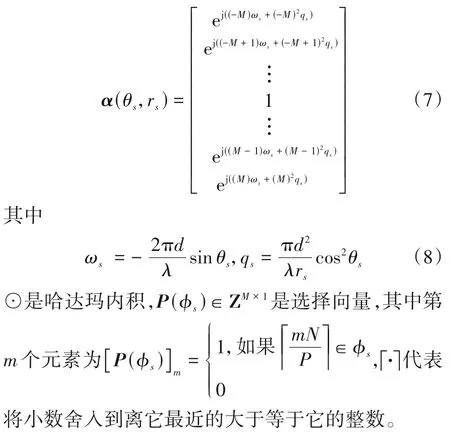
其中h∈C(2M+1)×S,gs是第s条路径的增益系数,(θs,rs)是散射体s的最后一跳到参考点的角度和距离,导向矢量α(θs,rs)∈C(2M+1)×1为
在信道估计的阶段,用户发送全1 的导频到基站,基站的接收信号为y=+w,其中P是发射功率,w∈CM×1是均值为0 方差为1 的加性高斯白噪声。在给定接收信号y的情况下,基站估计出角度、距离和路径增益,从而估计出信道h。
3 算法设计
3.1 子阵列的角度估计
3.1.1 中心子阵列角度估计
阵列信号处理中,信号的观测空间可分为信号子空间和噪声子空间,这两个空间是正交的,信号子空间是由接收信号协方差矩阵中信号对应的大的特征值对应的特征向量组成的,噪声子空间是由剩余的小的特征值对应的特征向量组成的。在近场条件下,信号子空间与噪声子空间的特性仍然存在。由于非平稳性的存在,本文分别为每个子阵列的接收信号的协方差矩阵做特征分解,由于信号子空间对应的特征值较大而噪声子空间对应的特征值较小且趋向于0,因此根据特征值的大小,可以区分信号子空间和噪声子空间,即可以判断出该子阵列可见的散射体个数。
对于中间子阵列,阵列内的天线序号是对称的,当信号参数取到真实的角度θ和距离r时,根据MUSIC算法构建空间谱函数,有

其中,Un是噪声子空间。
由于均匀线阵的对称性,导向矢量α(θ,r)可以被分解为:
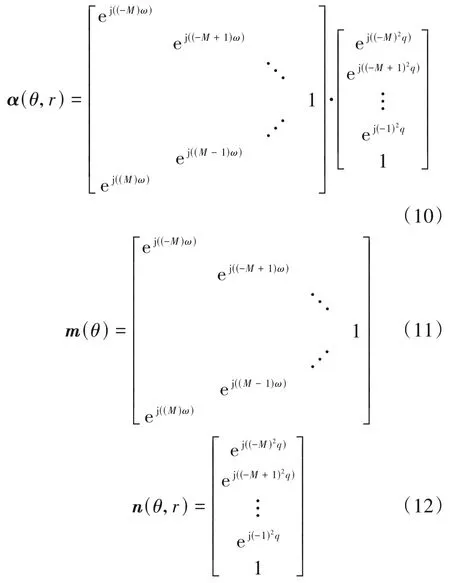
可以看出m(θ)∈C(2M+1)×(M+1)只包含角度信息,而n(θ,r)∈C(M+1)×1包含角度和距离信息,且n(θ,r)≠0。将m(θ),n(θ,r)带入空间谱函数:


可以看出M(θ)∈C(M+1)×(M+1)只包含角度信息,且为非负定的共轭对称矩阵,又因为n(θ,r)≠0,所以nH(θ,r)M(θ)n(θ,r)=0 成立的充要条件是M(θ)为奇异矩阵。噪声子空间Un的列秩为2M+1-S,由于假设S≤M,所以Un的列秩大于等于M+1,可得M(θ)为满秩矩阵,只有当角度参数取到实际值时,M(θ)降秩,为奇异矩阵,空间谱函数可以变为搜索下式

max(·)表示找最大值,det(·)表示取行列式的值。
对于中间的子阵列,可以直接用上面的方法,因为中间子阵列的天线阵列顺序是m=-Mn,-Mn+1,…0…,Mn-1,Mn,其中Mn=(Pn-1)/2,满足对称形式,只要取完整的导向矢量α(θ,r)的中间部分,然后将式子中的M替换成Mn 就可以估计出中间子阵列的角度。
3.1.2 非中心子阵列角度估计
除了中间的子阵列以外,其余子阵列的天线序号并不满足上述算法中所需的对称结构,可以转换参考点到当前子阵列n的中心,如图2 所示,将此时子阵列导向矢量内的元素为:


图2 转换参考点的阵列Fig.2 The array transformed by reference point
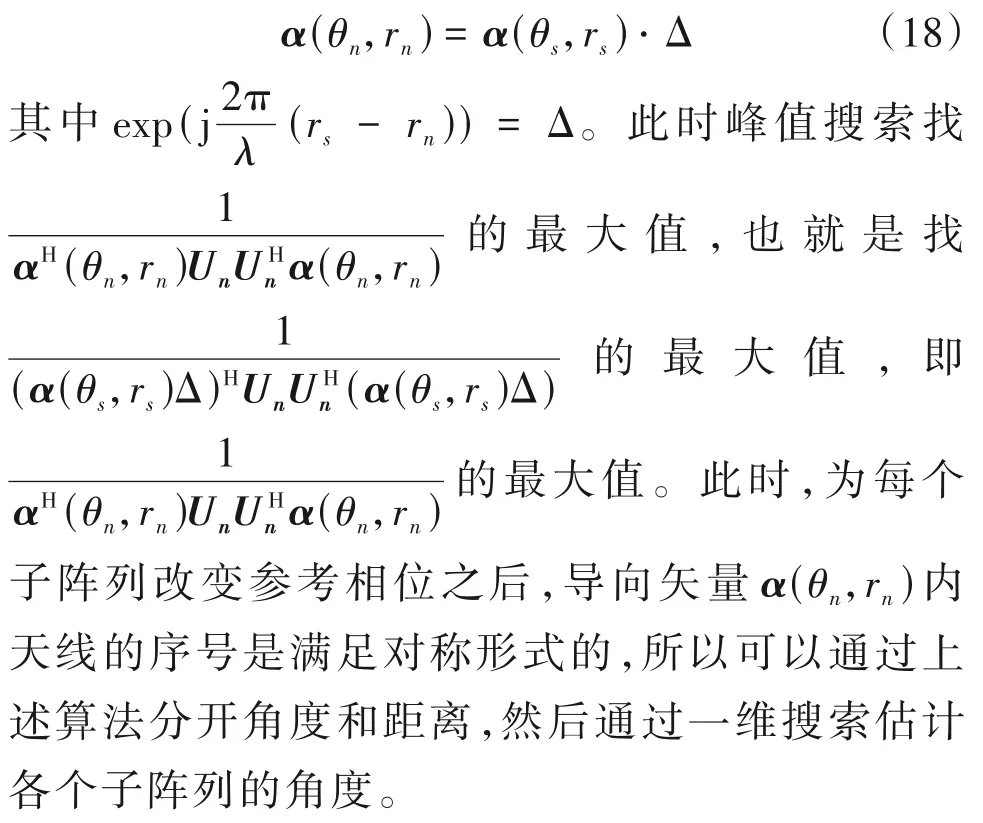
(θn,rn)为散射体到子阵列n的角度和距离,将原来中心子阵列的参考点(θs,rs)改写为散射体到子阵列n中间天线的角度和距离(θn,rn),此时天线的相位差τ'=2π(rm-rn)/λ,而以中心子阵列中间天线作为参考点时,相位差为τ=2π(rm-rs)/λ,虽然参考天线变了,但是天线之间的相位差有固定的差值τ'=2π(rm-rn)/λ,以原来(θs,rs)的为参考点做峰值搜索找函数的最大值,改变参考点的导向矢量为
3.2 非平稳选择向量的确定
当各个子阵列的角度得出后,同一个散射体可见的相邻子阵列的角度值有一定的递增或递减顺序,且相邻子阵列角度差值不大,因此根据得出的角度值,可以判断出散射体可见的子阵列区域,即可得到散射体与子阵列的对应关系,例如若散射体s 可见区域为子阵列1 至5,则选择向量P(φs)中子阵列1 至5 对应元素为1,即[P(φs)]m=1,m=1,2,…,5×Mn,其中Mn 为子阵列天线数目,其余不可见子阵列对应元素为0。
3.3 导向矢量中角度的确定
当中心子阵列可见时,导向矢量的角度θs直接由中心子阵列估计出的角度确定。
当中心子阵列不可见时,导向矢量中的角度θs不能直接通过中心子阵列估计出来,则需要通过其他两个可见的子阵列角度来求。例如下图3所示的三角函数关系,rs·r7·sin Δθ2=r6·r7·sin Δθ1,假设Δθ1≈Δθ2,rs≈r6,则θs≈θ7-Δθ2,则可以近似得到角度θs。由于越靠近中心子阵列,rm越接近rs,Δθ也越接近,所以使用靠近中心子阵列的两个可见子阵列来估计角度最准确。
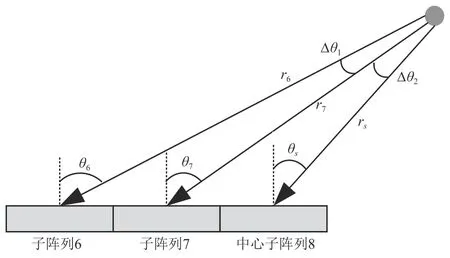
图3 子阵列角度与距离的三角函数关系Fig.3 Trigonometric relation between angle and distance of the subarray
3.4 距离和增益的估计
当导向矢量中的角度确定后,将其带入式(9)进行峰值搜索,估计的距离为

根据导向矢量(7)、(8)可以看出,只有q中包含距离r,当天线序号m的取值较小时,包含距离r的取值较小,距离估计不准确,所以根据选择向量的结果,在估计距离的时候,选择使用边缘的子阵列来估计距离。
当角度和距离都已经得到后,可以用最小二乘法来求解路径s的增益系数gs:

其中,方向矩阵A∈C(2M+1)×S由导向矢量α(θ,r)和选择向量P(φ)组成,

3.5 复杂度分析
用算法中复乘的次数作为复杂度的评价标准,将本文算法的复杂度与经典的2D-MUSIC算法的复杂度进行比较,对于每个阵列本文将角度和距离分开搜索,角度搜索的复杂度为O{nθ(P-S)(M+1)(P+M+1)},距离搜索的复杂度为O{nrS(P-S)(P+1)},总复杂度为二者相加:O{(P-S)[nθ(M+1)(P+M+1)+nrS(P+1)]},而2D-MUSIC算法的总复杂度为二者相乘:O{nθnr(P-S)(M+1)(P+M+1)},其中P为阵列的天线数,M=(P-1)/2,S为散射体的个数,nθ和nr分别为角度空间和距离区间的谱峰搜索次数,所以本文的算法与经典的2D-MUSIC 算法相比,减少了复乘的次数,降低了复杂度。

表1 超大规模非平稳MIMO信道估计算法Tab.1 Extremely large-scale massive non-stationary MIMO channel estimation algorithm
4 仿真分析
本文采用球面波的二阶近似抛物面波进行建模来模拟近场效应,同时考虑了大规模天线阵列存在的信道空间非平稳性问题,散射体到天线的距离r,相邻天线的距离d都用信号波长λ进行归一化处理。假设以阵列的中心为参考点,两个散射体到参考点的角度和距离分别为(-20°,240λ),(30°,190λ)。假设用P=25*15 根天线阵列,即天线阵列平均分为15个子阵列,每个子阵列25根天线,有两个散射体,每个散射体的可见子阵列大于2。
本文首先考虑不同的散射情况下,信道的均方误差大小。如图4 考虑了四种情况,(a)中散射体s1的可见子阵列为1 至8,散射体s2的可见区域为8 至15,(b)中散射体的可见区域分别为子阵列3 至8 和8 至13,(c)中散射体的可见区域为子阵列3 至6 和10至13,(d)中散射体的可见区域为子阵列1至5和11至15。
图5 中仿真了图4 中不同散射环境下信道估计的均方误差MSE 随信噪比的关系,MSE 通过来计算。随着信噪比增大,四种环境下信道的均方误差也随之减小,且环境(a)的均方误差最小,因为在(a)与(b)环境下,都是采用中心子阵列估计角度,但是(a)采用子阵列1 和15估计距离,而(b)采用子阵列3 和13 估计距离,因此(b)中距离的估计不如(a)准确,因此(b)的均方误差比(a)大;(c)和(b)环境采用相同的子阵列估计距离,但是(c)估计角度使用的子阵列不如(b)的子阵列精确,因而(c)的均方误差比(b)大;(d)中使用子阵列4 和5 估计角度,准确度没有其余情况高,因此其信道的均方误差最大。
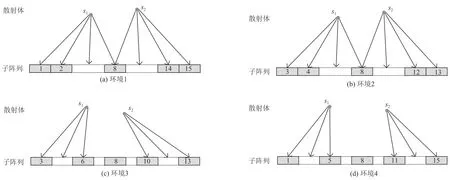
图4 不同的散射环境Fig.4 Different scattering environments

图5 不同散射环境下的均方误差对比Fig.5 Comparison of MSE in different scattering environments
图6的仿真结果为考虑信道的非平稳性和近场效应其中之一,和同时考虑非平稳和近场效应,信道均方误差的对比,可以看出随着信噪比的增加,信道的MSE 也在下降,但是仅考虑非平稳或者近场效应的均方误差远大于同时考虑近场效应和非平稳情况的信道。图7的仿真结果为本文所提算法与LS 和MMSE 两种信道估计算法的性能比较,从图中可以看出本文所提算法信道估计的均方误差比LS和MMSE方法小,信道估计的性能更好。
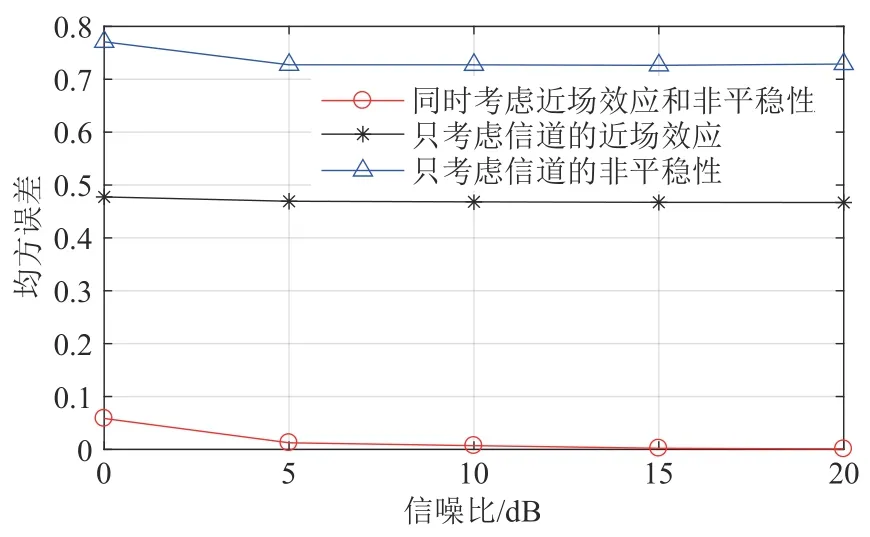
图6 不同考虑情况下的均方误差对比Fig.6 Comparison of MSE under different considerations

图7 不同算法的均方误差对比Fig.7 Comparison of MSE of different algorithms
此外,本文仿真了不同子阵列估计角度和距离的均方误差,图8 中分别使用中心子阵列、子阵列5和6、子阵列4 和5、子阵列2 和3 来估计角度,分别计算出估计误差;在得到角度估计值后,图9分别用子阵列1、2、4、6 估计距离,并计算距离估计误差。根据仿真结果可知对于角度估计,越靠近中心子阵列越准确;对于距离估计,越靠近边缘子阵列越准确,与之前的分析一致。

图8 不同子阵列估计角度的均方误差对比Fig.8 Comparison of MSE of angels estimated by different subarrays

图9 不同子阵列估计距离的均方误差对比Fig.9 Comparison of MSE of distances estimated by different subarrays
5 结论
本文考虑了在天线规模较大时存在近场效应和非平稳情况下的信道估计,用抛物面波近似球面波模拟近场效应,将大尺寸的天线阵列平均分为多个子阵列,用子阵列与散射体的对应关系来描述非平稳性。对信道参数进行估计时,本文提出分开估计角度和距离,分别通过两次一维峰值搜索得到。首先对每个子阵列分别估计角度,对天线序号不对称的子阵列,改变其导向矢量的形式,转换参考点,使其天线序号为对称形式,此时峰值搜索函数可以分开角度和距离,从而可以通过一维搜索估计角度。其次,当每个子阵列角度得出后,可以判断散射体的可见子阵列区域,并根据分析,使用边缘的子阵列来估计距离。最后使用最小二乘算法估计路径增益,从而得到估计出的信道。通过仿真验证,本文提出的算法的均方误差较小,且用越靠近中心的子阵列估计角度和越边缘的子阵列估计参数得到的信道均方误差最小,与分析一致。此外,相比于只考虑信道的非平稳或者近场效应其中一种,本文同时考虑近场效应和非平稳情况,信道的均方误差较小。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2022年4期)2022-08-23
移动通信(2022年7期)2022-08-10
成都信息工程大学学报(2022年2期)2022-06-14
好日子(下旬)(2020年6期)2020-08-04
移动通信(2019年2期)2019-03-27
发明与创新·大科技(2018年2期)2018-03-17
软件导刊(2018年1期)2018-02-01
CHIP新电脑(2016年7期)2016-07-18
CHIP新电脑(2016年3期)2016-03-10
数理化学习·教育理论版(2013年9期)2013-12-27