基于NB-IoT和UWB 的智能多功能拐杖
2022-10-13 13:45李澥郑芝兰林苑秋袁飞武吴泽佳
网络安全技术与应用 2022年8期
◆李澥 郑芝兰 林苑秋 袁飞武 吴泽佳
(广州软件学院 广东 510900)
21世纪的中国各地人口老龄化现象日益明显,外出出行及运动是新世纪老年人的生活理念,但老年人随着年龄的增长而身体机能逐渐下降,很多老年人为了增加平衡力,出行时会选择一把拐杖来支撑自己,但是老人独自出行时安全不能保障,会为家人带来负担。基于NB-IoT和UWB的智能多功能拐杖是根据65岁以上老人的使用需求而设计的一款基于现代物联网技术的低功耗智能控制拐杖。拐杖采用GIS北斗卫星导定位技术、GSM技术、UWB超宽带技术、语音识别等现代化技术,创新拐杖使用模式,建立一个真正为老人所用的新型拐杖。
1 系统总体设计方案
如图1所示,监护人使用手机APP绑定相关信息后,一旦老人启动紧急求救,拐杖将第一时间拨打电话和发送短信给其监护人,此外,拐杖通过GPS模块获取老人经纬度信息,NB模块将位置信息发送到我们的云端服务器,监护人可以在Android端手机APP查看到我们老人的实时定位和历史移动轨迹,同时监护人也可以通过电子围栏设定老人活动范围,一旦老人远离设定范围,APP将发送短信告知其监护人。在APP端我们还集成了自己的疾病查询数据库,监护人可以对应老人出现的症状查询相应的食疗方式,为老人制作健康饮食。在拐杖上,我们使用UWB技术实现精准跟随,语音识别技术结合收音机模块和照明灯,使老人可以通过语音控制使用收音机和夜间照明灯功能。
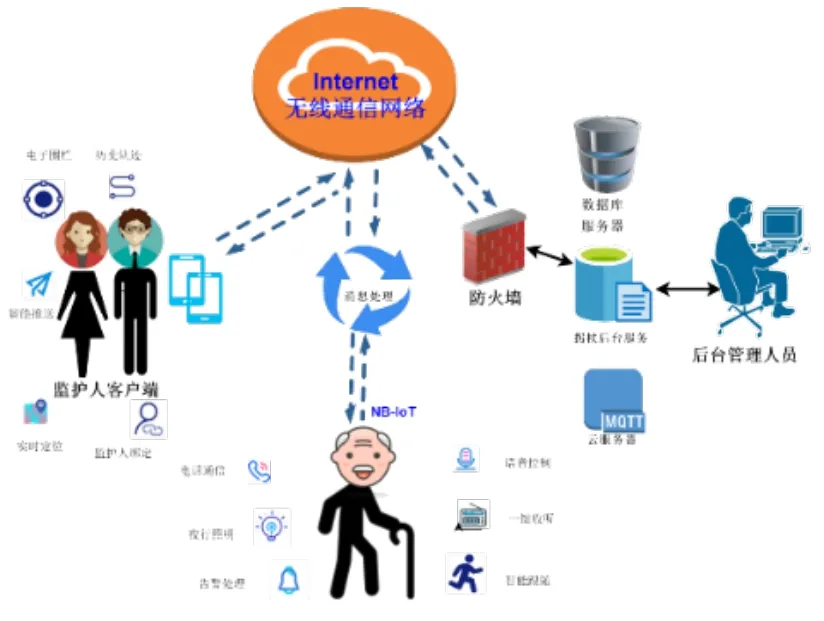
图1 系统整体架构图

图2 拐杖实物图
2 拐杖系统硬件设计
如图3,系统硬件采用两个STM32单片机作为控制器,一个作为系统核心控制器,一个作为跟随算法的处理控制器,从机控制器在接收到主机控制器发来的跟随信号指令后,开启跟随测距功能,控制左右电机转动;语音识别模块通过麦克风获取到的用户语音进行语音识别处理之后将返回数据包到中央控制器,中央控制器收到之后会做出相应操作并返回数据包给语音识别模块,语音识别模块将根据返回的数据包进行语音合成,之后将操作以语音形式通过扬声器告知用户是否操作成功;SIM808模块在接收到主机的控制命令时,调用麦克风和喇叭进行语音输入或者输出;收音机模块在收到开启指令时,开启频道搜索,搜索附近电台后将声音通过扬声器播出;节能LED灯采用继电器控制,控制器接收到开启命令之后,改变继电器连接引脚电平,控制LED灯亮灭;GPS模块将经纬度信息以心跳包的形式定时向主控制器发送位置信息,中央控制器将各个终端负载设备采集到的所有数据利用NB模块通过mqtt协议发送到我们的云端服务器上。

图3 系统硬件框图
3 拐杖系统应用层设计
拐杖系统应用层主要分为用户操作响应处理和数据库服务器两部分,设计采用阿里云主机配置,利用Android技术开发上层APP,集成和调用多个开放性API接口。数据库服务器端借助阿里云进行云服务器的搭建,设置了四个数据库表为用户端提供数据存储服务。监护人客户端可实时查看老人地理位置和历史轨迹等信息。
4 UWB实现跟随
4.1 UWB技术概述
虽然目前室外定位技术的发展需求可以被4 大全球定位系统(GPS、北斗系统、GLONASS 系统、伽利略卫星导航系统)满足,但在GPS信号极其微弱甚至接收不到信号时,人们将无法从卫星广播中提取获得位置服务和有效导航数据信息,所以人们专门研究设计了应用于室内的定位技术。UWB 定位模块是搭建UWB 超宽带自动跟随定位系统的重要组成部分,由一个移动标签和两个相对固定基站组成,是目前适用性最高的室内跟随定位系统。目前传统GPS技术已经成熟,可以针对自动跟随避障系统实现远距离定位需求,但GPS技术在近距离定位方面仍然存在定位精度差的问题。传统跟随采用的传感器如摄像头和超声波等也存在很多实际应用上的问题,而UWB技术既能实现近距离精准定位,也不存在传感器易受干扰的问题[14],因此拐杖使用此技术作为跟随定位的技术实现。UWB信号的发生可通过发射时间极短(如2ns)的窄脉冲(如二次高斯脉冲)通过微分或混频等上变频方式调制到UWB工作频段实现。设计中的智能跟随主要是采用TDOA(到达时间差的原理),利用UWB超宽带技术测得定位标签与两个基站的距离之间无线信号传播的时间差,通过S=V*T(其中V表示光速,T表示数据传输完成所使用的时间)求得距离,再进行跟随算法实现拐杖的跟随效果。
4.2 跟随设计
如图5,两个基站A0、A1分别放在拐杖盒子两边,老人携带一个标签TO互相组成一个三角形,知道两个基站之间的距离,两个标签距离,而对于任意三角形,一边的平方等于其他两边的平方减去两边与它们夹角θ的余弦的积的两倍,得出公式dis22=dis12+dis32-2*dis1*dis3*cosθ,由上式可得cosθ以及θ的值:
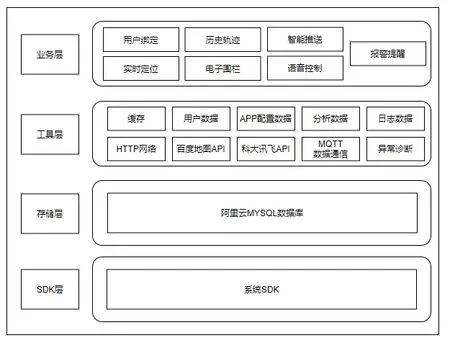
图4 系统应用层架构图

图5 拐杖系统测距跟随原理图

由图4我们可以知道,θ角会随着老人移动而逐渐变大或者变小,我们假设当两个基站的边与标签夹角θ等于某个角度的时候直走,大于某个角度的时候向减小θ角那里偏转,小于θ角,向调大角度的方向偏转。这样子就可以实现拐杖的跟随功能。
4.3 双侧双边测距原理
双向测距法(SDS-TWR)用于DWM1000 是被业内人士普遍认可的方法之一。双边双路测量算法被广泛应用,普遍性极高,甚至成了一种标准。
如图6,完成一次双边双向测距DS 测距需要 6 个步骤。

图6 双侧双边测距原理图
1)设备 A 发送 POLL 包。并记下发送时间 T1。并在一段时间后打开 RX。
2)设备 B 要提前打开接收,然后收到 POLL 包,记录时间 T2。
3)设备 B 在 T3(T3=T2+Treply1)时刻发送 Response 包,发送完之后打开 RX。
4)设备 A 收到 Response 包,记录时刻 T4。
5)设备 A 在 T5(T5=T4+Treply2)发送 Final 包。
6)设备 B 收到 Final 包,记录时间 T6。
此时,飞行时间的计算公式为:

上位机给两基站下达双向测距指令后,有一个发起基站发送信号,接收基站收到信号后立刻回传,发起基站收到之后再次发送,来回几次之后带入以上公式可求得飞行时间的均值,带入光速即可得到两基站的距离。
4.4 NB-IoT低功耗设计
根据物联网业务的特性,NB-IoT芯片采用低功耗低成本的设计方式。例如,采用180kHz窄带系统,降低片内FLASH/RAM,采用半双工模式,降低功耗等。NB-IoT模组PSM模式下功耗为uA级别,设备只有在需要数据传输时才唤醒,其余的时间进入PSM模式,且PSM模式两次唤醒时间最长可达300小时。据官方数据统计,NBIoT的功耗,仅为2G的1/10,终端模块的待机时间可长达10年,所以基于NB-IoT的智能守护杖在同样的电池规格下,续航能力会比目前市面上的wifi通信智能手杖大大增强。
5 结束语
基于NB-IoT和UWB 的智能多功能拐杖是老人的贴身“小跟班”,实现了拐杖的智能化管理,能更好为老人服务。随着研究的不断深入,智能拐杖上可以嵌入更多的健康指标监测功能,如检测体温、血压等,具有较高的市场应用价值。
猜你喜欢
老友(2022年6期)2022-06-27
青年文学家(2021年25期)2021-11-01
海峡姐妹(2020年6期)2020-11-18
老年博览·上半月(2020年1期)2020-02-10
武昌理工学院学报(2016年4期)2017-01-17
企业技术开发·下旬刊(2016年8期)2016-10-13
大众健康(2016年8期)2016-09-28
中学科技(2015年11期)2015-11-25
中学生英语·阅读与写作(2008年4期)2008-12-22
中学生英语·外语教学与研究(2008年4期)2008-03-18