
基于线性动力系统的低空复杂度度量方法
2022-10-14 06:04杨建华胡明华
哈尔滨商业大学学报(自然科学版) 2022年5期
杨建华,胡明华,周 逸
(南京航空航天大学 民航学院,南京211106)
随着近年来无人机(Unmanned Aerial Vehicle,UAV)技术和应用得到空前的发展,无人机的高速发展正在改变现有的空域格局,最近几年频繁颁布关于无人机的办法和规定,可以看出国家越来越重视无人机的发展,并在未来考虑将无人机融入国家空域系统.低空空域运行成为当前航空业重点关注的重点.与传统的空中交通管理有所不同,由于目前低空空域的管理规则尚未完善,低空空域具有较为自由的运行环境,面向低空空域运行的发展,如何有效的评估低空空域态势,以更直观的空域复杂度指标,是未来低空空域运行所需要解决的关键问题.
对空域复杂度的评价方法,在高空的空中交通管理中,已有许多国内外学者对其进行了相关研究.美国联邦航空局的P·Kopardekar等人[1]提出了9个空中交通复杂性指标,而后欧洲的研究人员B·Hilburn[2]等人对上述9个指标进一步细化,构建了108个交通复杂性指标.Gianazza·D等人[3-4]建立了28个空中交通复杂性指标.Gunduz·H[5]使用深度学习的方法,从高维度数据中获取到非线性和复杂性特征.Chatterji·G等人[6]以空域结构与交通流特征评估空域复杂性.Laudeman等人[7]建立了基于动态密度的定量数学模型,将动态密度映射到空域复杂度评估.Prandini等人[8]提出了基于冲突风险判断复杂度的方法.肖明等人[9]通过遗传算法对多个指标进行最优选择,从中选择了7个关键复杂性指标.
上述研究主要从两个方向对空域复杂度进行评估:一方面是从管制员负荷和空域扇区的内在结构进行研究;另一方面是通过机器学习算法对高维的指标进行筛选,找出更为关键的指标评估复杂度.针对低空空域无法采用与高空相同的方法,因为与高空的运行环境不同,如何构建有效描述空域的交通态势的指标是亟待解决的问题.因此,基于此本文提出基于线性动力系统的模型,对离散化空域下的无人机航迹点进行复杂度计算,从而评估空域内的交通态势,并基于离散化的空域网格结构对整体的空域复杂度进行评估.
1 线性动力系统模型
本文的低空复杂度评估是基于线性动力系统建模,综合一个交通复杂度指标,以更好地量化空域的拥堵状况,这将比一个简单的无人机数量独立于交通配置更有意义.
线性动力系统(Linear Dynamical System, LDM)[10-11],描述了给定状态向量的演化,是通过找出一个向量场尽可能接近的观测给出的无人机的位置和速度.这种方法产生了一个综合复杂度度量,能够识别空域的高(低)复杂度区域,并比较它们的相对复杂度.可以利用该方法获得的度量来量化给定空域内一组轨迹的局部无序程度和相互作用.
该方法的关键思想是通过一个线性动力系统来建模无人机轨迹的集合,在每个时刻用线性动力系统建模一组航迹,一般方程如下:
(1)

(2)


(3)
为了使用矩阵的形式,引入了以下矩阵:
(4)
(5)
(6)
基于上面的矩阵,可以将式(3)写为:E=‖V-C·X‖.使E达到最小等同于最小化E2=‖V-C·X‖2,则问题转化为找到一个矩阵C使E2最小化.利用矩阵的推导性质,得到E2的梯度可以表示为:
CE2=-2(V-C·X)·XT
(7)
使梯度等于0可以得到:
CE2=0⟺C·X·XT=V·XT
(8)
推出得到最优矩阵Copt:
Copt=V·XT·(X·XT)-1
(9)
其中:表达式XT·(X·XT)-1可以写成矩阵XT的伪逆,则可以写为:
XT·(X·XT)-1=LT·S-1·R
(10)
其中:S表示为矩阵XT的奇异值的对角矩阵.这种奇异值分解的方法对于避免条件复杂的问题有很好的效果.
因此,最终矩阵C可以表示为:
C=V·LT·S-1·R
(11)
矩阵A可以从矩阵C中得到:
A=L·D·UT
(12)
该模型能够产生一个与任何交通情况相关的总的度量指标,并能识别任何全局交通模式,综合衡量了给定的交通情况.
根据求解出的特征值,一个动力系统可以在收缩、膨胀、旋转这三种模式的组合中演化.图1给出了计算矩阵和相关特征值的四个典型例子,以及相关情况的特征值在复数坐标系中的位置.

图1 特征值位置的4种典型情况Figure 1 Four typical cases of eigenvalue locations
图1显示了四种典型的交通结构的矩阵A的特征值的位置:平行、汇聚、分离和环绕.矩阵的特征值控制了系统的演化.这些特征值的实部与系统在特征向量方向上的收敛或发散有关.当该特征值具有正实部时,系统处于扩张模式,当该特征值为负时,系统处于收缩模式.另一方面,特征值的虚部与系统的旋度组织水平有关.
在情况1中,特征值是空的,因为航空器是平行飞行的,代表了一种平移,即航空器之间的距离随着时间的推移保持不变.在情况2中,特征值是实特征值为负,系统在汇聚模式下发展,四架飞机正在收敛,即判断的标准是航空器之间的相对距离随着时间的推移而减少.与第2种情况相反,情况3是分离航迹,其特征值为正,航空器是在分离的,即相对距离随时间增加.情况4中环绕情况与完全的虚特征值有关,因为航空器在所有时间内都保持相同的距离,彼此之间保持相同的距离,呈卷曲状运动.
在实际的低空空域运行,以群体的稳定性出发,上述情况1中的平行飞行由于本文研究中定义的无人机以匀速飞行,整体运行状态稳定,不会造成局部空域的拥堵情况,情况3表示空域中的无人机以分离趋势运行,同样不会造成采样航迹点周围局部空域的拥堵状况,情况4中的环绕情况在低空空域的运行中一般不会出现.因此,本文针对情况2中的汇聚情况,即当无人机的运动朝向某一区域运行时,认为会造成局部空域的拥堵,增加空域的混乱情况,造成空域态势的改变.
2 低空复杂度评估方法
2.1 复杂度计算方法
本文基于离散化的低空空域结构将低空空域按照不同粒度大小的网格进行层级划分,对无人机的航迹点集合基于线性动力系统的模型求解得到每条航迹的复杂度指标.
为了获得无人机i在时刻k时的复杂性Ψik,其过程通过搜索周围一定范围的无人机观测向量,识别无人机i在时刻k周围的交通状况.
搜索空间以参考无人机的航迹点为中心,创建搜索空间,寻找在搜索邻域内与无人机i有冲突风险的无人机,并找到该无人机在时刻k的观测矢量.
通过式(12)确定矩阵A后,我们可以从这个矩阵中提取复特征值,对无人机i在时刻k时,会得到矩阵A的复特征值集合:
(13)

因此,可以推出复杂度指标如下:

(14)
通过上述推导,可以得出无人机i的航迹总复杂度Ψi为:

(15)
所以在空域内所有的无人机决定的总体复杂度Ψ可以表示为:

(16)
2.2 基于离散化网格的复杂度评估
在实际的无人机运行场景中,如何确定合适的搜索空间,更精确的反映低空空域复杂度,本文采用一种基于空域网格化的方法,即将低空空域运行环境以合适的网格粒度进行划分,构建离散化的空域空间网格,将航迹信息映射到空域空间,更准确地反映局部和整体低空空域范围内的交通复杂性,反映低空的复杂度状况.
该方法首先利用空域网格化的方法,将所研究的低空空域进行离散化处理.依据所选取的网格粒度和离散的时间步长Δt确定网格中的每个单元的大小.识别每条无人机航迹的各个航迹点所对应的网格单元,即通过对第i架无人机的航迹中的第j个离散的航迹点Pi,j,根据其航迹点的三维坐标(二维空间和一维时间)(xi,j,yi,j,ti,j)映射到对应的网格单元单元Cm,n,l,k.网格单元的Cm,n,l,k索引号的计算方法如下:
(17)
(18)
(19)
对映射到网格单元Cm,n,l,k的所有航迹点,基于2.1节提出的线性动力系统模型计算这些航迹点的复杂度求其平均值,计算得到的复杂度用于表征该网格单元内的复杂度.
3 仿真实验
本文面向低空空域运行,结合基于线性动力系统的方法,对低空空域复杂度评估进行了仿真实验.进行了多次模拟仿真实验,验证了以线性动力系统模型描述低空空域态势以及复杂度的有效性.首先,设置了仿真场景进行了实验,探讨了该方法用于描述交通态势的有效性,然后,从航迹维度和时间维度构建了描述空域复杂图的数据地图,反映了低空运行环境下的复杂程度.
3.1 仿真场景设置
本节选择了以初始航迹运行下的空域和解脱后航迹运行下的空域的两个场景,分别对航迹复杂性和空域复杂度进行计算,评价低空空域态势.相关控制参数如下:低空空域内无人机数量分别为100架,仿真空域为一个面积为9 km×9 km的二维低空空域,其中随机生成障碍物区域.见图2.

图2 二维空域以及无人机初始航迹Figure 2 Two-dimensional airspace and initial UAV trajectory
3.2 场景1—初始航迹下的空域
1)航迹复杂度度量
通过基于线性动力系统模型的对100架无人机的航迹每架无人机航迹点集合进行航迹点复杂度计算,对于无人机的航迹复杂度,即为其采样航迹点的复杂性值的累计.
图3是对每条航迹的复杂度进行计算并统计,可以得到航迹复杂度的平均值为3.28,航迹的复杂度集中分布在0~14之间,且有10架无人机的总航迹复杂度为0,即在对应的无人机运行中,周围无复杂的交通态势.

图3 航迹复杂度统计(初始空域)Figure 3 Trajectory statistic (initial airspace)
2)空域复杂度度量
基于复杂度度量评价,本文将9 km×9 km以200 m×200 m的网格粒度大小进行离散化,将空域网格中的复杂度指标以热力图的形式表示,如图4所示.其中离散化的网格单元的复杂度以在该网格内的所有航迹点复杂度的平均值计算得到.

图4 空域态势图(初始空域)Figure 4 Airspace Situation(initial airspace)
3.3 场景2—解脱后航迹运行的空域
1)航迹复杂度度量
通过基于线性动力系统模型的对100架无人机的航迹每架无人机航迹点集合进行航迹点复杂度计算,对于无人机i的航迹复杂度,即为其采样航迹点的复杂性值的累计.
图5是对每条解脱航迹的复杂度进行计算并统计,可以得到航迹复杂度的平均值为1.68,航迹的复杂度集中分布在0~10之间,且有10架无人机的总航迹复杂度为0.

图5 解脱航迹复杂度Figure 5 Conflictre solutiont rajectory complexity
2)空域复杂度度量
对于空域复杂度的度量,本文将9 km×9 km以200 m×200 m的网格粒度大小进行离散化,将空域网格中的复杂度指标以热力图的形式表示出来,如图6所示.其中,离散化的网格单元的复杂度以在该网格内的所有航迹点的复杂度的平均值计算得到.
3.4 对比分析
如图2所示大量无人机航迹分布在整体空域的上半部分,图4和图6展示了对应的空域地图下的复杂度地图反映了运行空域下的复杂程度,交通态势复杂区域与航迹图呈现一致性.总体上,在航迹聚集较密集的区域,该空域范围内的复杂度指标呈现局部较高的态势,而在航迹较少的区域有着较低的复杂度指标.总体上,复杂度指标的高低与空域运行环境呈一致性关系.
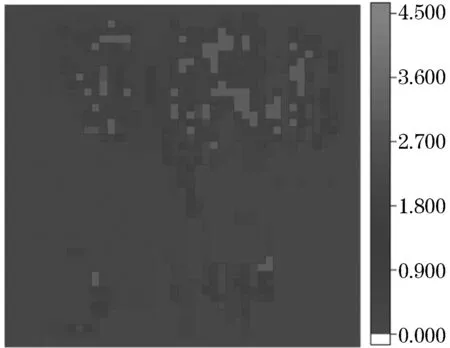
图6 空域态势图(场景2)Figure 6 Airspace Situation (Situation 2)
基于低空的运行环境,对比场景1和场景2,在场景2下的无人机航迹复杂度与场景1下相比有明显的降低约为48.4%,即初始航迹运行下的空域交通态势更为复杂,在解脱航迹下的空域与初始空域相比有着明显的复杂度下降.需要注意的是,虽然在场景2下以解脱航迹的空域运行,仍有部分区域的复杂度较高,这是由于选取表征复杂度的网格的粒度大小造成的,在200 m×200 m粒度下的网格内会存在多架无人机的航迹点呈汇聚趋势,造成在该粒度下的局部交通态势较为复杂.
4 结 语
本文采用基于二维空域的运行环境,采用线性动力系统的方法,通过对无人机航迹点周围一定空间内的交通态势情况进行计算,得到航迹采样点的复杂度指标,以计算得到的复杂度指标对航迹复杂度和空域复杂度,对低空态势进行评估分析,并通过对比初始空域环境和解脱航迹空域运行环境,分析低空空域的交通态势变化情况.结果证明,以线性动力系统的方法计算复杂度对无人机航迹和低空空域进行度量,可以有效地反映出空域内的交通态势变化状况,以及空域运行时的复杂区域,为今后低空态势评估以及运行管理提供理论基础和依据.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
网络安全与数据管理(2022年3期)2022-05-23
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
军民两用技术与产品(2021年10期)2021-03-16
雷达科学与技术(2020年4期)2020-09-11
烟台大学学报(自然科学与工程版)(2020年1期)2020-02-08
北京航空航天大学学报(2017年9期)2017-12-18
课程教育研究·新教师教学(2016年18期)2017-04-12
南方文学(2016年3期)2016-06-12
