超声波测距在螺旋桨轨迹测试中的应用研究
2022-10-14 05:54李宝国左正军李忠良
长沙航空职业技术学院学报 2022年3期
李宝国,左正军,李忠良
(1.中国民用航空飞行学院广汉分院,四川 广汉 618307;2.成都工贸职业技术学院,四川 成都 611731)
目前服役的通用航空器大致分两类:一类是旋翼机;另一类是固定翼飞机。固定翼飞机可分为喷气式飞机与螺旋桨式飞机,也可以分为定距螺旋桨飞机与可变距螺旋桨飞机。对可变距螺旋桨固定翼飞机而言,每当飞机进行过螺旋桨拆装工作后,按照飞机维修手册要求,必须对其螺旋桨轨迹(即桨叶角间隙及桨叶活动间隙)进行检查。当前飞机制造厂家给出的检查方法是通过一根钢板尺进行测量,如图1所示,但精度不易控制。为了解决该问题,本研究设计了一种以STC89C52单片机为控制核心,采用超声波传感器对螺旋桨轨迹进行测量的设备,并通过LCD1602液晶显示器将测试数据进行实时显示。维修人员通过对比三次测得的数据的差值来判断发动机螺旋桨轨迹是否达标。测试结果表明该设计可以提高测试精度与工作效率。

图1 螺旋桨轨迹测试
1 系统总体设计
频率超过20 kHz的声波被定义为超声波,其常见频率有几十千赫到几十兆赫,超声波由于方向性好、穿透力强、声波效能较为集中,可以用来危险环境测距、倒车雷达、杀毒、清洗等,因此广泛应用在农业、医学、工学中[1-4]。本研究以STC89C52单片机为控制单元,通过超声波模块对螺旋桨轨迹进行测量,并将测量结果实时显示在LCD1602液晶显示器中。电位计模块用来调节LCD液晶显示器对比度,电池通过电源模块降压稳压处理后为单片机、超声波测距模块、显示模块提供稳定工作电压,最后通过对比测量值的差值Δd来判断螺旋桨轨迹是否满足飞机维修手册要求。系统总体结构框图如图2所示。
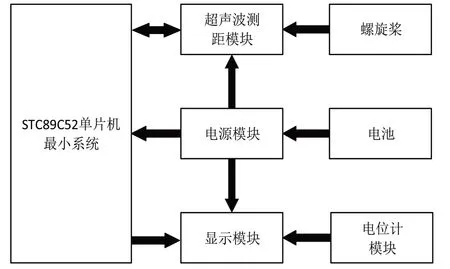
图2 系统总体结构框图
2 系统硬件设计
2.1 单片机最小系统
单片机最小系统由STC89C52单片机、晶振电路、复位电路,电源电路组成。STC89C52单片机较STM32单片机功耗更低、价格更加低廉[5-6]。STC89C52单片机负责接收超声波测距模块的回波信号,通过接收到的回波信号时间来完成距离计算,并控制LCD1602显示器实时将距离值进行显示。由于该单片机工作电压为4.5-5.5 V,因此本次设计采用移动电源为该系统供电。晶振电路为单片机提供时钟脉冲信号,确保单片机可以正常工作,本次设计使用的是12 MHz晶振,故其机器周期为1 μs。当测试设备出现异常情况时,可通过长按复位按钮接通复位电路,强制单片机从头开始执行程序,解决测试过程中的异常问题[7-8]。单片机最小系统如图3所示。
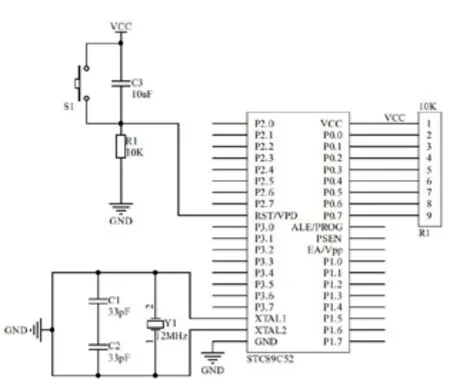
图3 单片机最小系统
2.2 超声波测距原理
超声波测距是利用了超声阻碍的特点[9]来进行距离的测量的。具体原理为:当超声波发射器发出声波信号后,声波会在空气中传播,当声波遇到障碍物时会被障碍物反射回来,返回的声波被超声波接收器接收。经分析可知:只要记录下从超声波发射至接收到返回声波的时间差Δt,知道声波在空气中的传播速度v,就可以计算出超声波发射器距离障碍物的距离
2.3 超声波测距模块
通过对比红外测距、激光测距、毫米波测距得知超声波在短距离测距方面,成本低廉、适应能力更强[10]。设计采用的超声波测距模块型号为US-015,该模块分辨率可达0.5 mm,测距精度高,重复测量一致性好,测距稳定可靠,可实现2 cm—4 m非接触测距功能,电气参数见表1[11-12]。
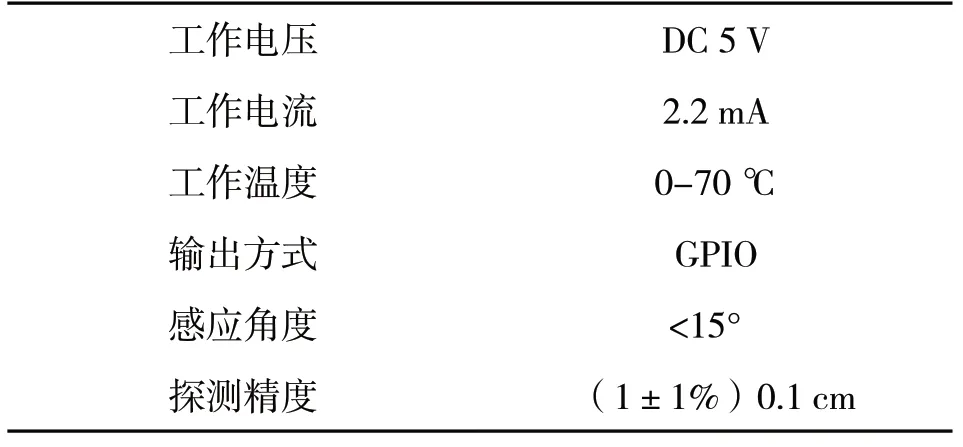
表1 US-015超声波测距模块电气参数
该模块可由单片机GPIO端口直接驱动进行测距,与单片机硬件连接如图4所示。从图4可以看出超声波测距模块共有4根管脚,这里对部分管脚做如下说明:Trig管脚连接至单片机的P1.6口,当P1.6口输出一个10 μs以上的高电平时,可触发超声波模块测距。Echo管脚连接至单片机P1.7口,当超声波测距模块测距结束时,Echo管脚会向单片机P1.7口输入一个高电平,电平的宽度为超声波往返时间之和[11]。
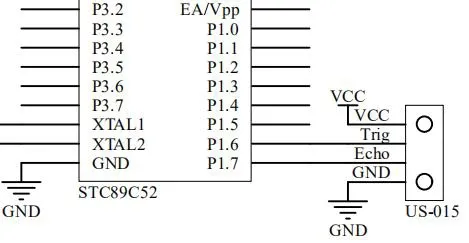
图4 硬件接线图
2.4 显示模块
显示模块主要是向设备使用者实时显示超声波传感器距桨叶背面的距离值,理论分析可知当桨叶角改变时,此距离值也会随之改变。设计采用目前使用最为广泛的一种显示模块LCD1602,该模块是一种专门用来显示字母、数字、符号的点阵型液晶模块,它由若干个5×7或者5×10点阵字符位组成,可直接显示ASCII码对应字符,可以满足本次设计对字符显示的要求,并且价格低廉,使用方便,模块主要电气参数见表2[13]。该模块同样可由单片机直接驱动进行字符显示,硬件连接如图5所示。从图5中可以看出LCD1602共有16个引脚,其各引脚功能见表3。
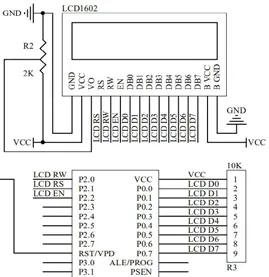
图5 硬件接线图
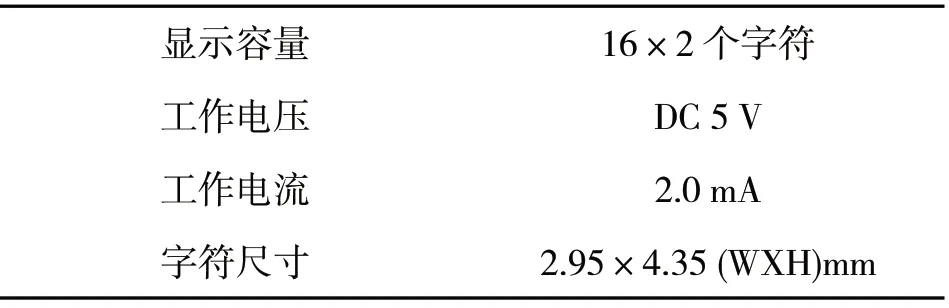
表2 LCD1602电气参数

表3 引脚功能
这里对部分引脚做下说明:
3号引脚:用来调节模块背光的对比度,过高过暗都会影响显示效果,本次设计中使用电位计模块来调整偏压信号。
4号引脚:当该引脚为高电平时,引脚DB0~DB7传输的数据是要显示的内容。当该引脚为低电平时,引脚DB0~DB7传输的是命令,主要用来初始化液晶模块。
5号引脚:控制数据传输方向,由于本次设计是命令模块显示数据,因此需要将该引脚保持低电平。
3 系统软件设计
系统软件代码是在Keil开发环境中由C语言完成编写的,程序由三部分组成:主程序、超声波模块测距程序、LCD1602模块显示程序。
3.1 主程序设计
主程序主要负责初始化定时器T0/T1的工作方式,并装载计数器初始值,开启定时器及定时器中断和总中断,测量超声波模块Echo回响端高电平信号时长,完成距离的计算,主程序流程图如图6所示。
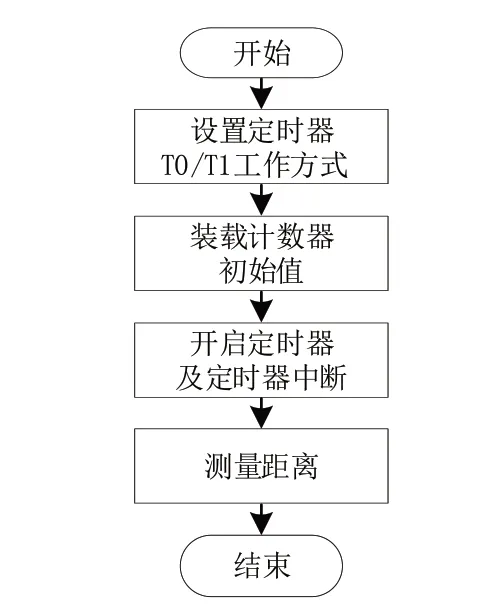
图6 主程序流程图
3.2 测距程序设计
超声波测距模块由控制电路、超声波发射电路、接收电路组成。超声波测距模块时序图如图7所示,给该模块的Trig引脚输入一个大于10 μs的高电平信号,发射电路会发送8个40 Hz方波信号,方波信号会被前方障碍物反射回来,当接收电路检测到信号返回时,Echo引脚输出高电平信号,且该高电平信号脉冲宽度t与所测距离s成正比,通过计算Echo高电平信号脉冲宽度t,可求得距离s=vt/2,v是超声波在空气中的传播速度,为340 m/s[15-16]。测距程序流程图如图8所示。
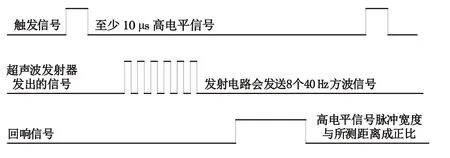
图7 超声波测距模块时序图
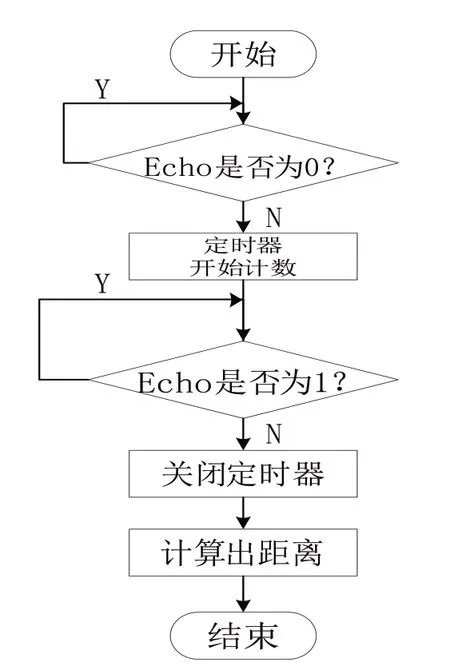
图8 测距程序流程图
3.3 液晶显示程序设计
液晶显示程序主要为测试设备使用人员提供实时距离显示,方便飞机维修人员记录数据,LCD1602显示模块操作步骤由三部分组成:初始化、写命令(设置显示坐标)、写数据。此部分程序首先根据模块时序图封装了两个常用函数即写命令与写数据函数,这两个函数仅RS引脚电平不同。当需要写命令时,首先将RS引脚、RW引脚拉低,然后将指令送给DB0~DB7端口,最后给使能引脚一个正跳变,写指令完成;当需要写数据时,首先将RS引脚拉高,RW引脚拉低,然后将数据送给DB0~DB7端口,同样给使能引脚一个正跳变,写数据完成。液晶显示模块初始化工作主要由这两个函数实现,初始化流程如图9所示。
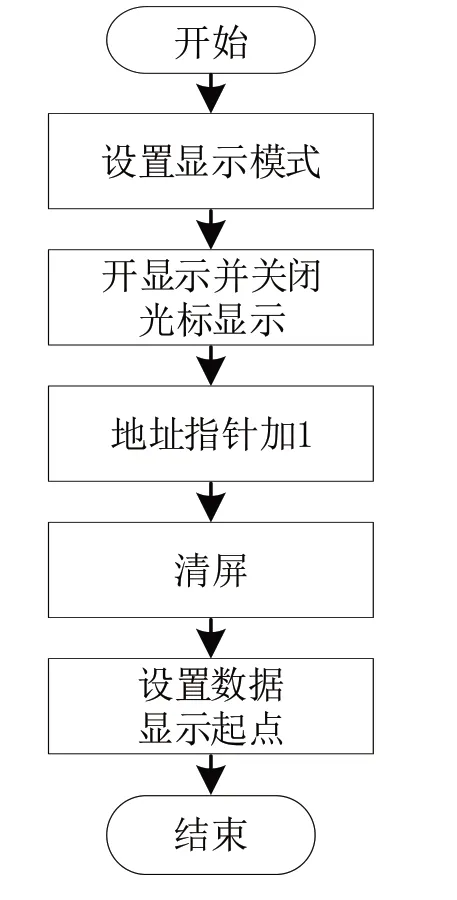
图9 显示模块初始化流程图
4 性能测试与分析
理论分析可知:当桨叶角发生改变时,超声波测距模块返回的距离值应会随之发生改变。受实验条件限制,本研究使用一块与桨叶宽度相似的挡板来进行测试,具体测试方法为:改变挡板正对超声波测距模块的角度(模拟桨叶角改变),示意图如图10所示(俯视图),记录距离值s,看其是否会随着角度θ变化而变化,测试结果见表4。
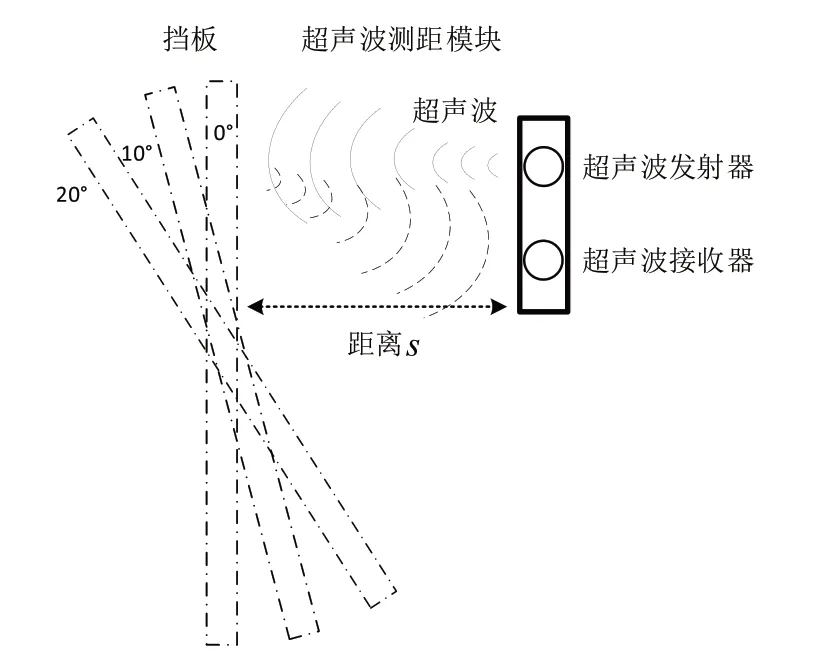
图10 测试示意图(俯视图)

表4 测试结果
由表4数据可知:当桨叶角存在至少2°变化时,超声波测距模块测得距离值s会发生改变,因此可以判断超声波测距模块可以感知桨叶角的变化。最后本研究又选择了一架双发可变距三叶螺旋桨飞机进行测试实验。依据飞机维修手册要求,将测距设备放置在距离叶尖后缘4英寸位置处进行测量,如图11所示,并记录下测试数据如表5所示,Da、Db、Dc为测距仪测得的距离值(测距仪分别距离三片桨叶的距离),其中Δd1=Da-Db、Δd2=Da-Dc、Δd3=Db-Dc。实 验 数 据 表 明:Δd1、Δd2、Δd3均小于维修手册数据要求,说明桨叶角间隙和桨叶活动间隙正常。
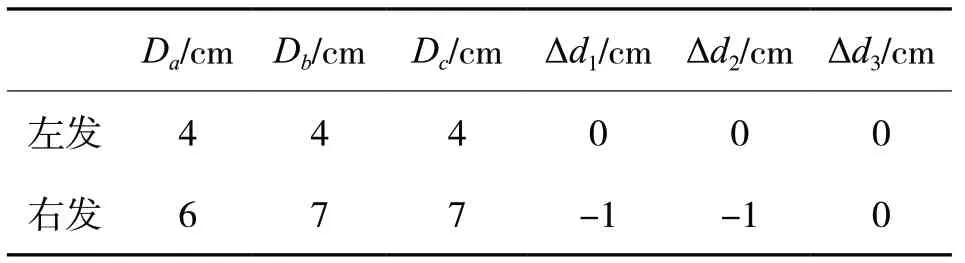
表5 桨距测试数据
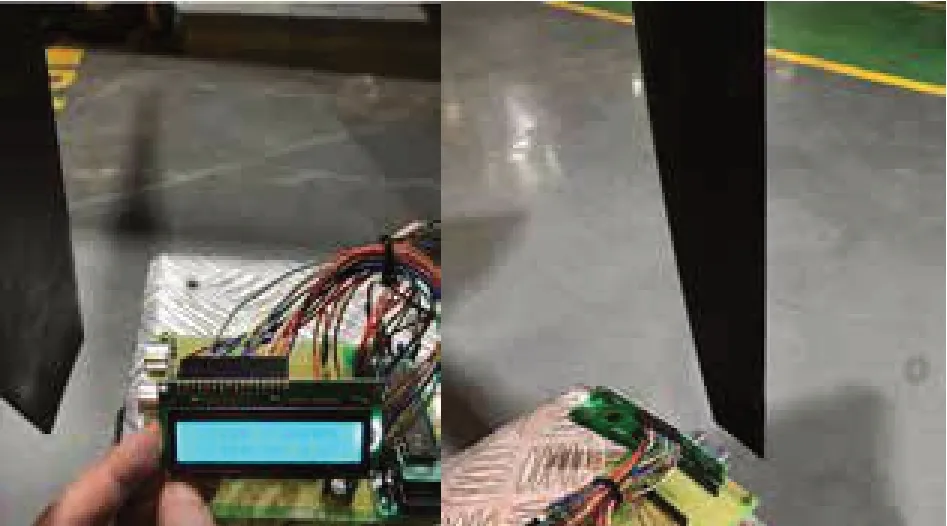
图11 螺旋桨轨迹测试
5 结束语
通过研究超声波测距技术在螺旋桨轨迹测试中的应用,本研究设计了一种基于STC89C52单片机的螺旋桨轨迹测试设备,并完成了与该设备相关的硬件及软件设计。实验数据表明,该测试设备工作稳定、操作方便,可以应用在螺旋桨轨迹测量工作中。与厂家提供的测量方法相比较,该设备对提高螺旋桨轨迹检查工作效率及测量精度具有一定的推广价值和实用意义。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
科学技术创新(2022年23期)2022-07-25
中国科技纵横(2022年6期)2022-04-28
航空工程进展(2022年2期)2022-04-24
电子制作(2019年19期)2019-11-23
科技传播(2019年15期)2019-08-22
固体火箭技术(2018年6期)2019-01-18
电子制作(2017年7期)2017-06-05
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15