蛙人水下声信号特征研究综述
2022-10-17 10:53孙玉臣陈维义王平波王世哲
声学技术 2022年4期
孙玉臣,陈维义,王平波,姜 斌,王世哲
(1.海军工程大学兵器工程学院,湖北武汉 430033;2.中国人民解放军92767部队,山东青岛 266102;3.海军工程大学电子工程学院,湖北武汉 430033;4.海军潜艇学院航海观通系,山东青岛 266100)
0 引言
随着海上特种作战模式的发展,无人水下航行器、武装蛙人等水下小目标,被越来越多地用于秘密潜入敌方港口、基地等重要水域,执行侦查、破坏等一系列军事任务。为了保证对己方重要水域的警戒能力,各国多采取雷达、可见光及热成像探测等成熟的方式对水面以上进行预警,而水面以下的探测预警手段却比较薄弱。
为保证行动的隐蔽性,蛙人大多采取潜入水下的方式秘密接近敌方水域。在雷达、可见光、热成像及声呐等多种常用的物理探测方式中,雷达、可见光等方式一般采用电磁波作为探测媒介,因其信号在水下衰减极为严重,难以对蛙人等水下目标实施有效探测。信号频率同为30 kHz时,电磁波在水下的辐射损失可达7 500 dB·km-1,声波仅为5 dB·km-1[1],而电磁波实际的频率远高于30 kHz,因此在水下的衰减更为严重。所以与水下雷达和视频监视等方式相比,探测水下的蛙人等目标,主要依靠的是声呐设备。
1 反蛙人声呐研究现状
蛙人与潜艇等水下目标相比体积较小,在潜入任务目标的过程中一般采取水下慢速游泳的方式,目标噪声强度低,而其经常活动的港口、基地等浅海水域,因存在坝体、沉船、礁石等诸多后向散射体,混响噪声十分严重[2-3],因此探测水下蛙人具有一定的难度。为了发现水下小型体积的目标并辨别其种类,需要使用高分辨率的高频声波;为了增加对目标的探测距离,需要目标具有较高的回波强度,因此各国普遍使用高频主动声呐探测蛙人,其工作频率范围主要为60~100 kHz,带宽为3~20 kHz不等,发射声强级范围为180~210 dB,最远探测距离一般为400~2 000 m[4-6],主要采用吊放或固定的方式部署于大型舰船、港口、基地的船侧、海底或墙体等位置[7]。被动声呐主要依据蛙人自身辐射的噪声信号进行目标探测,蛙人潜泳装具的呼吸器减压阀振动、水下呼吸产生的气泡在水中的破裂及游泳时的划水动作,均是蛙人产生辐射噪声的主要原因。由于港口等浅海环境噪声成分复杂,且蛙人这一小目标的信号强度低,被动声呐对蛙人目标的探测难度较大。但与主动探测方式相比,声呐选用被动方式具有诸多优势,如:对生态环境友好,工作方式隐蔽,能耗低,鲁棒性强,尤其是配置于重要舰艇平台周围时,不易暴露自身,且更易分辨各种目标的不同声学特性,识别能力较好[8-9]。
经过多年发展,国外自2004年开始列装各类蛙人探测声呐装备,其中主动声呐型号较多,被动声呐相对较少,另外还有水下成像等各种蛙人探测声呐面世[4,10-14]。国内虽然起步较晚,但自2008年开始,多型国产蛙人探测声呐也开始投入实际应用,技术上也逐步缩小与国外的差距[3-4,15-16]。
2 蛙人目标声信号特征研究进展
声呐对蛙人的探测方式主要分为主动和被动两类。主动方式主要依靠蛙人的反射回波进行目标确认,被动方式则主要依靠蛙人的水下声辐射信号进行目标探测。
2.1 国外对蛙人目标回波的研究
1976年,美国海军水下中心的Fish等借鉴探测海豚的方法,利用主动声呐对蛙人进行了水池探测,发射器工作频率采用60 kHz,试验表明主动声呐对蛙人的探测效果优于海豚[17]。
2005年,美国海军研究生院的Sarangapani等借鉴圆柱模型建立了蛙人目标强度的复杂函数模型,使用60 kHz工作频率的FS-3相控阵主动声呐,对不同方向、不同深度的蛙人进行了浅水试验,利用三维映射的方法,验证了蛙人目标强度与入射波方向及频率有关[18]。
2006年,意大利的Hollett等分别计算了开式和闭式呼吸器在特定频率的目标强度,利用海上试验发现在100 kHz频率声呐信号的照射下,蛙人携带闭式呼吸器时目标强度范围为-20~-25 dB;携带开式呼吸器时目标强度约为-15 dB,主要源于蛙人呼出气泡的反射[19]。
波兰格但斯克技术大学和波兰海军学院的Kozaczka等分别使用侧扫声呐对闭式呼吸蛙人、使用被动式线列阵对开式呼吸蛙人进行了探测,通过建立气瓶目标强度模型,计算出在15、60、450 kHz三种工作频率中,15 kHz时气瓶的目标强度最大;使用450 kHz侧扫声呐可以通过声呐成像分辨出蛙人呼出的气泡群、气瓶及腿部;使用被动方式可以明显分辨开式呼吸蛙人的周期性水下呼吸,开式呼吸蛙人的目标声信号的频率主要集中于10 kHz以内,其中2 kHz附近能量最为集中,水下噪声能量级的分布范围为10~15 dB[20]。
2013年,美国佐治亚理工学院的Demarco等使用经过训练的隐马尔可夫(Hidden Markov Models,HMM)模型对蛙人声呐图像进行识别,并运用于水下无人航行平台中。实际效果显示,此方法对于运动中的蛙人识别效果比较显著[21]。
2019年,克罗地亚萨格勒布大学的Kvasić等将图像识别中的卷积神经网络算法引入对蛙人的水下声呐图像识别,研究了一种鲁棒可靠的声呐图像处理方法,通过对多种相关模型的研究,验证了卷积神经网络算法在声呐图像识别中用于蛙人检测和跟踪的可行性[22]。
2019年,Islam等借助于简单卷积神经网络(Convolutional Neural Network,CNN)算法的水下图像识别模型,对泳池及海洋中的蛙人目标进行识别和跟踪,利用人体姿态检测模型来识别运动的蛙人,识别模型能够兼顾准确率和机器计算时间,具有较好的鲁棒性。在图像清晰的前提下,模型对蛙人的识别率可达96%以上,并能准确识别水下无人航行器[23]。
2.2 国内对蛙人目标回波的研究
国内对蛙人水下声学信号特征的研究虽然起步较晚,但进展较快,并取得了一系列成果。
2009年9月,聂东虎等在松花湖通过试验测量了蛙人的目标信号,在理论建模、仿真、水池试验和湖试的基础上,分析出蛙人的主要信号源为潜水装具和呼出的气泡,肺部是次要信号源。在20~70 kHz频率范围内,携带呼吸气瓶的潜水蛙人目标强度范围为-25.3~-15.1 dB;蛙人呼吸声的能量主要集中于30~300 Hz范围内,蛙人吸气引起的气瓶振动噪声主要集中于3~20 kHz频段,在11.03 kHz频率附近谱峰明显,蛙人呼气导致的气泡破裂声主要集中于10 Hz~2 kHz频段,水下衰减小且包络比吸气明显[9]。
姜卫等用动物的肺部组织来模拟蛙人的肺部,使用比较测量法发现,在20~40 kHz频段主动声呐作用下,动物肺部的目标回波强度约-25.3 dB[24]。
张波等通过仿真和试验,对开式和闭式呼吸的蛙人目标强度进行了分析,试验采用了频率为75 kHz的主动声呐进行声波照射。依据试验结果中蛙人目标回波强度的高低,蛙人的回波信号依次来源于:开式呼吸呼出的气泡(不小于-16.9 dB)、干式潜水服(约-17 dB)、开式呼吸气瓶(约-24 dB)、蛙人的身体(约-27.2 dB)。试验还发现,身穿湿式潜水服并采取闭式呼吸的蛙人目标回波强度仅不到-25 dB。另外,试验中动物充气肺部组织的目标强度在125 kHz频率声波照射时约为-25.9 dB,且肺部组织的声速随频率变化明显[2,25-27]。
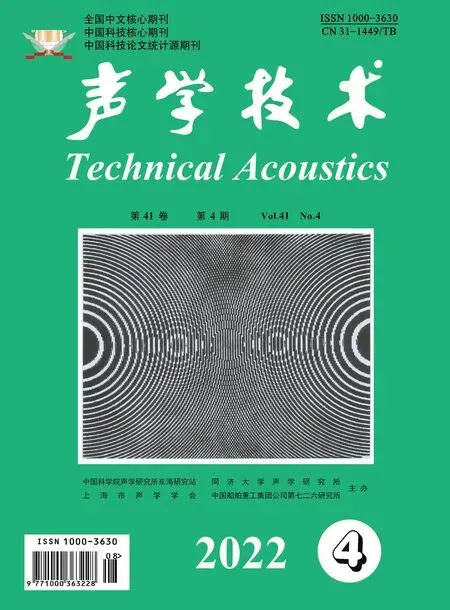
穆志海通过湖试,对开式呼吸蛙人分别在主被动探测方式下的信号特征进行了研究。在主动探测方式下,使用20~60 kHz频段的连续波(Continuous Wave,CW)照射,测量了蛙人正面、侧面和平躺方向的目标强度,发现正面目标强度平均值为-8.9 dB,侧面目标强度平均值为-9.2 dB,平躺时目标强度平均值为-19.8 dB,说明蛙人的目标反射主要来源于胸腔、呼吸器和呼出的气泡,平躺方向的目标反射面积相对正面和侧面要小得多;在被动探测方式下,发现蛙人的呼吸声频率为0.3~0.4 Hz,呼气时主要产生低频分量(2 kHz以下),吸气时主要产生高频分量(2~20 kHz),且吸气时的高频成分比较规则,可用于蛙人探测。蛙人呼吸声信号的辐射声源级为116 dB,利用矢量水听器可在70 m处有效探测到蛙人吸气过程产生的高频段成分[28]。2 kHz以下蛙人呼吸声功率谱如图1所示。
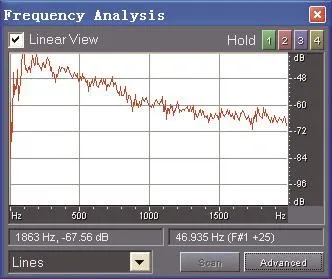
图1 2 kHz以下蛙人呼吸声功率谱[28]Fig.1 Power spectrum of frogman breathing sound below 2 kHz[28]
2014年,Yang等针对中心频率为70 kHz、带宽为10 kHz的蛙人探测声呐,对抑制宽带声呐系统混响的算法进行了改进,提出了基于小波交叉谱的宽带分束形成后的时空稳定性估计,讨论了小波域中的估计算法。实验结果表明,其所提出的相差幅值和时空方差的融合处理方法能够有效抑制混响[29]。
文献[30-33]利用图像声呐,提出了基于蛙人形态特征的水下小目标识别算法,并进行了声呐图像处理,其中滤波去噪、背景相减、伪彩色图变灰度图等算法被应用于图像的预处理,骨架提取和闭合运算的算法则被应用于形态学处理;另外针对青岛某港口的多波束声呐探测数据,使用了基于区域生长和图像二值化的自适应双帧差法。之后他们又使用支持向量机(Support Vector Machine,SVM)的方法,根据蛙人平均尺寸、游速、形状、游动方向和角度等五个特征因素,通过200张图像的训练,使蛙人目标的识别准确度达到了94.5%。
Zhu等提出了一种基于显著性声呐图像的蛙人探测方法,该方法通过对原始声呐图像进行分解和中值滤波,基于频率分析的显著性探测技术,对图像中的亮区进行分割,从而提高对水下不同姿态和运动方向的蛙人目标的定位精度[34]。
2012年,Liu等基于蛙人等水下小目标的声呐成像,提出了一种基于目标局部图像的全局近似数据关联算法,可以根据目标的形状和运动轨迹提高检测效率,以解决混响区域中的虚警问题。试验验证了该算法具有鲁棒性高、快速、准确的优点[35]。
2.3 国外对蛙人声辐射信号的研究
英国伯明翰大学的Chapman是最早研究水下蛙人声辐射信号的学者之一。1974年,他们发现蛙人呼吸产生的呼吸阀噪声具有周期性,其呼气产生的噪声主要集中于30 Hz~110 Hz频段,此频段的蛙人辐射噪声对水下鱼类的活动能够产生一定影响[36-37]。
2002年秋季,美国海军在圣地亚哥湾使用被动方式探测开式呼吸蛙人,验证了被动方式探测蛙人的可行性,并对蛙人的辐射噪声信号特征进行了分析,但结果未予公布[38]。
2005年,新西兰沃克沃斯奥克兰大学的Radford等在标准声压和参考距离条件下,对水下不同装具类型的蛙人声辐射信号进行了测量,发现蛙人的辐射噪声能量主要集中于低频(频率<200 Hz),且全闭式呼吸蛙人、半闭式呼吸蛙人和开式呼吸蛙人的声源级依次为(108±1)、(131±2)和(161±1)dB,携带呼吸器的蛙人能够被探测的距离因环境噪声级的不同而有所差异[39]。
自2000年以来,美国史蒂文斯理工学院(Stevens Institute of Technology)在使用被动声呐探测水下开式呼吸蛙人方面,做了许多工作,在领域内得到了高度认可。文献[40-43]使用多频带匹配滤波(Multiband Matched Filter,MMF)算法,运用参考信号对蛙人辐射声进行了子带能量匹配运算,通过估算主频的方式对蛙人进行了是否存在的有效检测,该方案可提供固定检测阈值,并在哈德逊河进行了多次蛙人试验;2006年,该学院海事系统中心的Chen等研究了强噪声干扰下的蛙人被动声探测技术,用单个水听器测量出蛙人基础呼吸声频率为0.2 Hz~0.4 Hz,提出了干扰抵消的多频带匹配滤波算法并进行了试验数据处理[40-41],史蒂文斯理工学院采集的蛙人信号频谱图如图2所示[42]。2006年,Stolkin为检测水下不同呼吸频率的多个蛙人目标,提出了基于Swimmer number的已知参考频谱向量算法,并在哈德逊河进行了湖试,试验结果表明随着检测距离的增大,Swimmer number近似线性减小,且不同的探测距离需要调整不同的检测阈值,另外该算法对特殊呼吸频率的蛙人检测效果并不理想[43-45];2007年之后,该学院的海上安全实验室(Marine Security Laboratory)提出了基于蛙人呼吸特征信号的多频带匹配滤波等优化的被动探测方法,通过试验,验证了蛙人水下声辐射信号的影响因素包括声源带宽级、频谱功率密度、呼吸周期和调制频率,其中声源主要来源于第一级(高压)呼吸阀及其使用寿命,其次是潜水员的训练经验,最后是携带的气瓶内空气压力和周围环境,这些都可以作为探测、定位水下蛙人的关键点[11,38,42,44,46-50]。史蒂文斯理工学院提取的蛙人声辐射信号周期图如图3所示[44]。荷兰应用科学研究所(Netherlands Organisation for Applied Scientific Research,TNO)的Fillinger等于2010年与史蒂文斯理工学院在荷兰港合作开展了被动蛙人探测的海试,验证了两种不同的非专用水听器也可实现蛙人目标的二维定位,水听器的探测范围受环境因素影响很大[51];该学院数学科学系的Molyboha等则于2012年提出了一种对蛙人水听器布放位置的随机优化算法[52]。
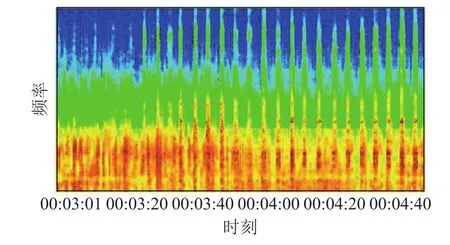
图2 史蒂文斯理工学院采集的蛙人信号频谱图[42]Fig.2 Spectrum diagram of diver signal collected by Stevens Institute of Technology[42]
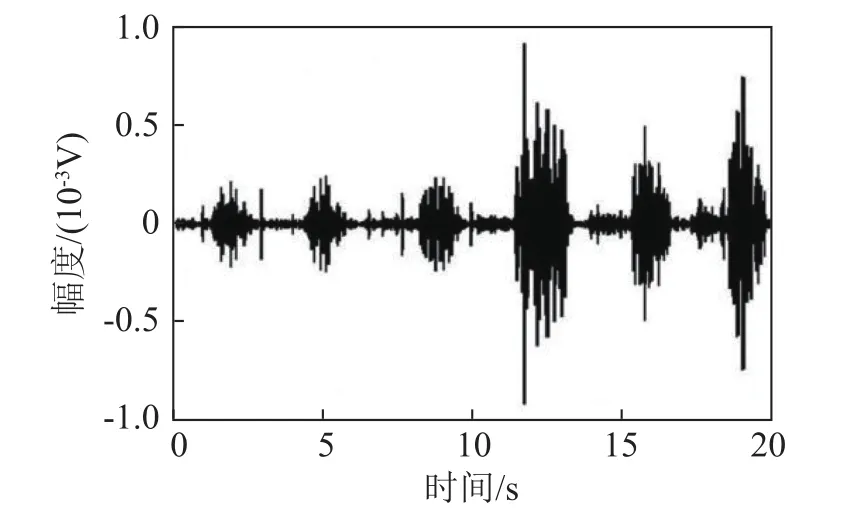
图3 史蒂文斯理工学院提取的蛙人声辐射信号周期图[44]Fig.3 Periodogram of a diver radiated acoustic signal extracted by Stevens Institute of Technology[44]
瑞典国防研究所(Swedish Defence Research Agency)对蛙人的水下被动探测技术进行了多年研究。2008年,Lennartsson等[8]采用被动方式对开式呼吸蛙人进行了水下声信号采集试验,试验的地点分别位于背景噪声较少的斯德哥尔摩群岛海域和人类干扰较多的哥德堡港口进行,在干扰较少的港口对蛙人进行了水听器性能测试和算法调教,在干扰较多的港口进行了双蛙人水下信号测试,验证了蛙人的水下呼吸频率为0.3~0.7 Hz,同时发现在30~35 kHz频段,环境噪声对蛙人信号的影响最小,信噪比较高,信号采集的窗口时间取10 s时最佳,在噪声背景嘈杂的港口中,水听器对蛙人的最远探测距离可达25 m。2009年,Lennartsson等[53]在哥德堡港利用被动水声(虚警率1%时的有效探测距离为30 m)和电(虚警率1%时的有效探测距离为10 m)融合的方式对蛙人进行水下探测,提高了对蛙人探测的可靠性。2010年Johansson等[54]针对蛙人的被动探测提出了基于预白化的检测算法,该算法使用参考频谱向量算法,并提前对背景噪声进行白化处理,可以在拓宽检测范围的基础上降低虚警率,并减小瞬态信号对检测带来的影响。
2012年,荷兰应用科学研究所在接近运输航道的港口中,使用被动式10元随机线列阵,并利用波束形成的方法,在距离120 m处成功探测到穿着闭式呼吸装具的蛙人,且同时检测到的目标个数超过5个。这也首次验证了使用被动方式探测闭式呼吸蛙人的巨大潜力[55]。
2012年,澳大利亚国防科技研究所海洋作战部的Lo等[56],将8元被动式蛙人探测声呐间隔14 m布置于距海底1 m处,开式呼吸蛙人沿阵列轴线从上方以恒定游速和深度游过,所提出的算法可以有效提取目标的多项运动参数,并可广泛运用于港口等嘈杂环境。
2012年,葡萄牙机器人与系统科学工程实验室(Laboratory of Robotics and Systems in Engineering and Science,LARSyS)将水下蛙人探测声呐安装于水面自主航行器对水下开式呼吸蛙人进行探测和追踪,采用基于扩展卡尔曼滤波的方法,显著提高了对目标位置的估计[57]。
2013年美国夏威夷马诺大学的Gemba对蛙人的声辐射信号时频特征进行了试验研究,试验中蛙人使用Scuba Pro MK 25开式呼吸气瓶潜入水下,该团队对采集到的18组试验数据首先使用11~15 kHz的Kaiser带通滤波器进行滤波,之后进行了包络谱检波处理,实验结果表明,在白噪声背景下,当信噪比为-11 dB时,能够实现对蛙人的100%检测[58]。
2013年7月,加拿大维多利亚大学的Lohrasbipeydeh等[59],在桑尼奇港口附近的开放海洋环境中,使用水听器对携带BLIZZARD和APEKS两类呼吸装具的开式呼吸蛙人进行了不同距离(1、2、5、10 m)和不同深度(5、10、15、20、25 m)的声辐射信号采集试验,试验结果表明蛙人的水下声辐射信号主要分布于100 Hz~10 kHz频率范围,信号周期与生理性呼吸大致同步(3~5 s),吸气能量主要分布于2~12 kHz频率范围(0.8~19 MPa,主要由减压阀振动产生),呼气能量主要集中于200 Hz~1 kHz频率范围(低于0.04 MPa,主要由呼出的气泡在水中爆裂产生,受排气口几何形状影响较大),呼气造成的低频信号能量高于吸气造成的高频信号,预告能量算子比平方能量算子更适合蛙人被动探测。Lohrasbipeydeh等采集到的蛙人声辐射信号的高频部分及低频部分分别如图4、5所示。
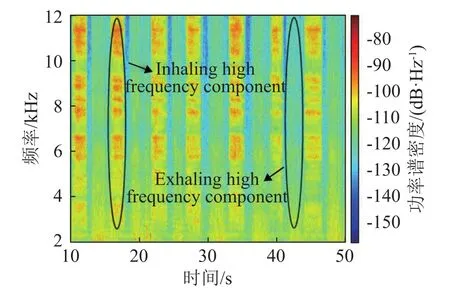
图4 Lohrasbipeydeh等采集到的蛙人声辐射信号的高频部分[59]Fig.4 Spectrogram of the high frequency components of a diver inhaling and exhaling signal in the ocean[59]
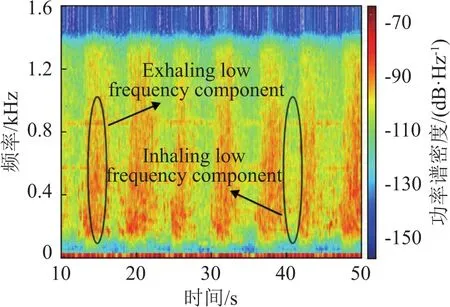
图5 Lohrasbipeydeh等采集到的蛙人声辐射信号的低频部分[59]Fig.5 Spectrogram of the low frequency components of a diver inhaling and exhaling signal in the ocean[59]
2016年,罗马尼亚海军研究中心的Slamnoiu等[60]在消声水池中采用被动方式对开式呼吸蛙人进行了探测,并使用多种DEMON优化算法对蛙人信号进行分析,结果表明所提出的DEMON优化算法可以更少占用计算资源。
2016年,俄罗斯的Gorovoy等在浅水湾中使用全向水听器对闭式呼吸的蛙人水下声信号进行了测量,蛙人目标静止于距水听器3 m处,目标信号包含明显的准周期分量,通过包络谱估计,吸气频率约为0.3 Hz,整个呼吸周期的频率约为0.6 Hz;当使用脚蹼游动时,蛙人运动信号也呈现频率接近的准周期分量[61]。
2016年,澳大利亚科廷大学的Erbe等,利用水听器分别对开式呼吸蛙人、水面冲浪、皮划艇、自由泳、蛙泳、潜泳等人类水中活动的声信号进行测量,分析了蛙人吸气和呼气的声信号特征,为不同人类目标活动的水下识别提供了依据[62]。Erbe测量的开式呼吸蛙人呼吸信号频谱图如图6所示。
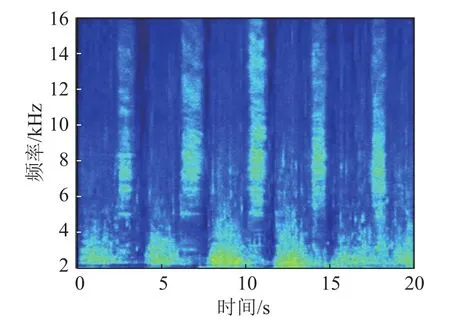
图6 Erbe测量的开式呼吸蛙人呼吸信号频谱图[62]Fig.6 Spectrum diagram of open frogman breathing signal measured by Erbe[62]
2.4 国内对蛙人声辐射信号的研究
2010年,张伟豪等采用被动探测技术,通过水池试验和在三亚的湖试,分析出了开式呼吸蛙人的水下声信号主要来源于呼吸的声辐射信号,蛙人水下呼吸频率约0.3 Hz,每个呼吸周期内包含高频信号成分,吸气比呼气的信号频率更高,能量也更大,试验结果表明匹配滤波法的检测性能优于带通滤波法,匹配滤波法可使蛙人在40 m有效探测距离的检测概率达到90%,而带通滤波法能检测到蛙人的最远距离为20 m[36]。
郑航等在2012年秋季的水池试验中,使用多种方法对开式呼吸蛙人的声辐射信号进行了处理,检验了无参考频谱向量检测和有参考频谱向量的匹配检测等多种算法用于蛙人被动探测的可行性,并指出蛙人呼气声信号频谱能量主要集中于0~2.5 kHz频段,吸气声信号频谱能量主要集中于2.5 kHz~12 kHz频段,蛙人的水下声辐射信号与生理呼吸过程的周期基本一致,频率约为0.3 Hz[63]。
章佳荣等以开式呼吸蛙人为研究对象,在湖试中采用被动方式采集了蛙人的呼吸声信号,对信号进行分析后发现蛙人呼气声信号能量主要集中于2 kHz频率以下,来源于水中破裂的气泡;吸气声信号能量主要集中于频率2 kHz以上,来源于减压阀的振动,且吸气信号包络周期性明显,约为3 s,是进行蛙人识别的重要依据,使用包络谱法提取信号特征时,为达到较好效果,需连续采集10个周期以上的信号[64]。
2012年,周威存利用矢量水听器,采用被动方式,在泳池试验中对水下开式呼吸和半闭式呼吸蛙人的水下声辐射信号进行了采集,提取了轻潜蛙人的呼吸频率与重潜蛙人的排气频率作为蛙人声信号的特征,并对开式呼吸蛙人和半闭式呼吸蛙人的声辐射噪声产生的机理进行了分析,提出了基于多子带匹配滤波(Multiband Matched Filter,MF)算法输出包络谱计算的Gamma作为蛙人检测的参考依据,仿真验证了矢量信号下的多子带匹配滤波算法在低信噪比下获取稳定有效的蛙人声能量包络的可行性[65]。
朱知萌等在2014年9月进行的湖试中,使用水听器对开式呼吸蛙人的呼吸声信号进行了测量,试验中蛙人悬浮于水下3 m,使用基于美尔频率倒谱系数(Mel Frequency Cepstrum Coefficient,MFCC)提取了蛙人呼吸声信号的特征,通过研究蛙人相邻周期、相隔周期呼吸的声信号,并与舰船噪声和环境噪声进行比对,表明了从参数分布线性拟合的MFCC辐射角和MFCC距离中得到的MFCC参量匹配结果可以作为辨别蛙人呼吸声与噪声的依据[66-67]。
王萍等在2016年通过光纤线列阵和压电换能器的湖试试验,对开式呼吸和闭式呼吸蛙人分别进行呼吸声信号采集,发现开式呼吸蛙人的包络声信号周期性明显,约为3 s,声信号包络谱在0.3~0.4 Hz频段之间十分突出,而闭式呼吸蛙人的信号包络不具备明显的包络特征;蛙人呼出的气泡声信号能量集中于频率2 kHz以下且信号比较突出,蛙人吸气造成的减压阀振动能量主要集中于2 kHz以上且蛙人识别信号比较突出,试验验证了被动声呐可靠探测蛙人呼吸声信号的可行性[67-69]。
2015年,Zhang等在吉林松花湖采用被动方式,对湿式潜水衣、开式呼吸蛙人进行了湖试,发现蛙人信号主要分为高频(2 kHz以上,主要来源于减压阀振动)和低频(2 kHz以下,主要来源于排出的气泡),低频段信号(呼气气泡)随距离衰减剧烈,而高频段信号(呼吸器减压阀振动)随距离衰减缓慢,且特征显著,是较为理想的被动探测频段。信号采集过程至少需要10个呼吸周期,且周期越多,信号特征越明显[70]。
2016年,宋宏健等在浅海水域对水下开式呼吸的蛙人进行了被动探测试验,其设计的信号处理算法实现了对蛙人的被动探测,有效探测距离为60 m,利用4个水听器组成十字阵可在二维平面内确定蛙人的准确方位[71]。
2017年,涂强等根据Stolkin的蛙人被动探测试验,建立了蛙人的水下声信道模型,并进行了被动方式采集开式呼吸蛙人水下声信号的水池试验。通过基于块的阈值算法(Block-based Threshold Algorithm,BTA)和改进的最小值控制递归平均算法(Improved Minima-controlled Recursive Averaging Algorithm,IMCRA)进行噪声抑制和滤波,提取去噪后的蛙人信号包络谱特征,发现蛙人吸气频率集中于2~25 kHz频段,呼气频率低于2 kHz,且13~18 kHz频段的吸气声信号特征可作为蛙人目标探测的依据,被动探测距离接近40 m[43,72-73]。
赵武等在标准游泳池中,使用标准水听器水平直线阵对穿戴开式呼吸器的蛙人进行了呼吸信号的采集和处理,蛙人在试验中基本悬停于水下1 m处。试验发现悬停的开式呼吸蛙人辐射噪声包含高频与低频成分,但高频成分(49~51 kHz)能量比较显著,其主要来源于蛙人吸气时呼吸器减压阀的振动,蛙人的呼吸声信号具有明显的周期性,频率大约为0.3 Hz,与噪声及其他目标信号区别较大,可作为水下识别蛙人的依据;同时提出了一种基于向量机的信号识别方法,通过与归一化多频带滤波方法的对比,发现基于向量机的方法精度更高[11,74]。
3 反蛙人声呐系统的关键技术
在技术方面,为使蛙人探测声呐的工作性能得到增强,一般需要在提高主被动声呐的目标检测识别能力、优化信号处理技术和探索新的组阵形式等方向开展进一步研究。
3.1 选择适合目标识别的频带
由本文可知,蛙人目标声辐射信号的频带范围为200 Hz~35 kHz从低频覆盖到高频,现有被动声呐主要采用窄带与宽带谱特征、倒谱特征等方法对水下蛙人目标进行识别。这些识别方法的前提是被动声呐能够获取足够带宽的目标信号。但一般现代被动声呐的频率越低,其带宽越窄,导致谱形、谱中心与带宽谱等特征几乎失去意义,传统的识别方法性能会有所降低。这对蛙人被动探测声呐的识别技术提出了新的挑战。所以在选择合适的水下蛙人探测方法的同时,要选择适当的声呐频带及带宽等特性[75-77]。
3.2 提高主动声呐的有效检测概率
目前,主动声呐探测蛙人主要依靠蛙人肺部空腔、气瓶以及呼出的气泡,蛙人作为小目标,其辐射噪声功率低,有效目标回波信号强度弱,且反蛙人声呐通常布置于浅海近岸,实际水下混响等干扰多,导致声呐系统对目标检测的难度较大。要改善对蛙人等小目标的检测能力,降低虚警,增加声呐的有效作用距离,就需要提高其信噪比。为此,可以从两个方面降低混响的干扰:一是改变信号的发射形式,使用宽带信道替代传统常用的连续波(Continous Wave,CW)信道,通过发射宽带、长脉冲来消除CW长脉冲与分辨率的矛盾,提高信噪比。二是抑制混响,降低背景噪声干扰,宽带信号本身有利于抑制体混响等随机干扰,并可使信号更加稳定,从而拓展声呐的有效探测距离。
在主动声呐探测目标的过程中,除了发射传统的水平波束,还可以发射可调节角度的垂直窄波束,依靠垂直窄波束的垂直指向性,可以降低来自海面、海床等混响的干扰,增强声呐对蛙人的三维探测定位能力。另外,依靠相关算法及声呐性能仿真建模、降低垂直波束的旁瓣级,也是一种声呐系统减小浅海混响影响的有效手段[68]。
3.3 自动跟踪和识别目标
目前,一般通过分离目标动静算法,实现在复杂噪声环境下自动跟踪蛙人等小目标。该算法首先分离静止和运动目标,并使多波束信号始终对准目标,以提高信噪比。然后使用交互式滤波方法,将目标的运动轨迹以声图的形式显示于屏幕等设备;对于多目标的情况,则采用极大似然滤波算法或多信息联合贝叶斯滤波算法,能够对多个运动目标实现同时跟踪,这两种算法已成熟应用在雷达探测中[7]。大数据和人工智能处理方法也逐步引入蛙人的识别分类中,基于大量实测数据可以构造目标水下运动特征大数据库,基于人工智能可以构建算法规则库,采用极大似然的原理可以提取和检测目标的特征进行统计和估计,实现蛙人自动识别[78]。
3.4 垂直相控发射匹配技术
反蛙人声呐布置的浅海环境一般都不是简单的平坦开阔地,要在各类复杂的水底仍能发挥正常的探测性能,避免混响的过多影响,声呐就需要对环境具备一定的自适应能力。垂直相控发射技术在国内的使用,使声呐可以更好地适应崎岖复杂的水下地形,该技术使用宽波束拓展声呐在水底的探测范围,并通过算法降低混响干扰,可以解决大束宽引起的能量发散问题,能够同步实现声呐盲区和混响的双重抑制,使地形环境问题不会过多影响蛙人探测声呐的性能[1]。
3.5 新形式组阵技术
由于相控和束控处理技术的进步,声呐阵列正逐步向更复杂的组阵形式发展:组成上由相同阵元发展为多种不同性能阵元,阵元间距由等间隔发展为变化间隔,布阵形式由平面布阵发展为立体布阵,激励方式由同等施加发展为非同等施加。这些技术上的进步能够显著拓宽基阵的频带等工作性能,有利于扩大基阵的应用范围。同时,在常用的波束形成等阵列信号处理过程中,经常会伴随出现阵元位置误差、时延估计精度限制等,导致无法准确分类目标,在技术处理过程中需要引起注意[79-80]。
4 结论
本文在介绍反蛙人声呐装备技术现状的基础上,考察了国内外对蛙人水下主被动声信号特征的研究进展,提出了反蛙人声呐装备系统发展的主要技术问题,综合分析表明,反蛙人声呐装备系统技术难度较大,涉及的学科门类和技术问题较多,发展途径也具有多样性。综合国内外研究成果,本文总结出蛙人的水声探测的发展情况主要有:
(1)主动声呐主要以水中气泡等水下空腔的回波作为探测的依据。在75 kHz主动声呐作用下,蛙人目标的回波信号强度介于-16.9~-27.2 dB,且由强到弱依次来源于:开式呼吸的气泡排出、干式潜水服、开式呼吸气瓶、蛙人的身体,其中蛙人身体的目标回波由强到弱依次来源于肺部、骨骼和其他软体组织,身穿湿式潜水服并采取闭式呼吸的蛙人目标回波强度也十分微弱,约-25 dB。
(2)被动声呐主要以开式蛙人的水下呼吸作为探测和识别的依据。开式蛙人水下呼吸的声辐射信号覆盖了200 Hz~13 kHz频段,其中吸气信号的频率(2~13 kHz)比呼气信号(200 Hz~2 kHz)高。吸气信号主要来源于呼吸器减压阀的振动发声,呼气信号主要来源于排入水中的气泡破裂。吸气信号的能量比呼吸信号更不容易衰减,成分也更加规则,且信号特征明显,是蛙人被动探测的理想信号;蛙人水下声辐射信号的包络周期(约3~5 s)与其生理性呼吸基本一致,其中吸气持续0.7~0.8 s,呼气持续1.2~1.5 s。在标准的声压和参考距离条件下,全闭式呼吸蛙人、半闭式呼吸蛙人、开式呼吸蛙人的声源级依次为(108±1)、(131±2)、(161±1)dB。
(3)图像声呐主要以蛙人的水下声学图像作为探测和识别的依据。许多研究机构将大数据和人工智能技术引入蛙人等水下目标的探测和识别,为蛙人等水下探测领域开辟了新的途径。
国外同行较早研究了声呐对水下蛙人的探测,他们在蛙人水声信号特性分析、蛙人探测声呐装备研制和蛙人反制武器方面取得了较多成果。我国经过多年的技术攻关,在蛙人探测领域,正逐步缩小与国际领先团队之间的差距,对蛙人水下声信号特征的研究日趋完善,所列装的主动声呐性能已接近国际先进水平,反蛙人武器系统也比较完备。但对复杂条件下的蛙人被动探测以及基阵部署等方面还需要投入更多的技术和精力,这也是守护我国“水下国门”的重要方向之一。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
小哥白尼(军事科学)(2022年5期)2022-08-17
舰船科学技术(2022年11期)2022-07-15
节能与环保(2022年3期)2022-04-26
数字海洋与水下攻防(2020年5期)2021-01-04
魅力中国(2020年18期)2020-08-25
设计(2020年24期)2020-01-25
中国电气工程学报(2019年14期)2019-10-21
海军航空大学学报(2019年1期)2019-04-29
小学科学(2017年9期)2017-09-20