
半潜式海洋平台阻力预报数值模拟分析
2022-10-18 12:10宋春辉陈勇军
舰船科学技术 2022年18期
易 丛,宋春辉,李 刚,陈勇军,来 敏
(1. 中海油研究总院有限责任公司,北京 100027;2. 北京迪玛尔海洋技术有限公司,北京 100085)
0 引 言
近年来,半潜式海洋平台因其良好的稳性、强大的抗风浪能力以及高速的作业效率等优点,在深海工程中发挥着不可或缺的作用。但海洋平台在海上作业时,受到风、浪、流等环境因素的作用,结构被破坏甚至发生倾覆等海洋事故时有发生,因此海洋平台阻力预报的准确性对海洋平台的整体安全性尤为重要。
为了实现海洋平台阻力的准确预报,国内外学者对平台阻力计算展开了大量研究。Mataymoto等针对某大水线面立柱半潜平台提出计算其气隙响应与分布的完全非线性方法。Li等基于一种新型深水平台建立平台主体与立管系统耦合模型,计算了风浪流联合作用下的平台的运动响应。范亚丽等针对恶劣海洋环境下的半潜式支持平台,通过分析试验来掌握其运动以及阻力特性。张明霞运用STAR-CCM+平台与OCIMF图谱插值方法对FPSO在多流向角度下的阻力数值进行计算。董斌等在水池试验的基础上利用Ansys-AQWA软件数值仿真,准确模拟出平台在自存工况下的阻力。袁洪涛等为了解系泊系统危险工况,对不同风浪流夹角对海洋平台系泊系统的影响进行研究。陈江华等采用SWAN模型进行不同方向风流浪对平台稳定性影响的分析,确定平台危险工况。
现阶段,学者对半潜式平台环境阻力的研究内容主要集中在风速、浪高与平台本身结构对所受阻力的影响,对不同流向角度下的阻力预报的研究并不多见。因此本文以某半潜式钻井平台为研究对象,基于STAR-CCM+平台对不同流向角度及不同来流速度下的平台阻力和三维表面压力进行计算,并分析来流速度和来流方向对阻力及表面压力的影响,研究结果对平台设计具有一定指导作用。
1 数值方法
计算流体力学(CFD)是一种基于计算数学、近代流体力学和计算机科学3门学科,通过在计算机上模拟流体流动,实现数值计算与可视化处理,从而达到对所求物理现象能够较为准确分析研究的方法。STAR-CCM+作为性能优良的CFD软件,在海洋结构物的水动力和流场模拟方面得到了广泛应用。
1.1 控制方程
本文数值模拟采用雷诺平均N-S方程,其笛卡尔坐标系下的张量表示形式为:
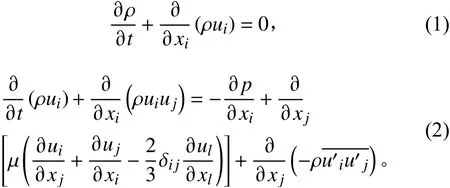
1.2 湍流模型
CFD软件中可选择的湍流模型有-ε 模型,-ω模型,RNG-ε 模型等,本文采用-ε湍流模型。
湍动能方程:

湍流粘性系数方程:

式中:为湍动能,ε为湍流耗散率;Y为可压速湍流脉动膨胀对总的耗散率的影响;µ为湍流粘性系数;G为平均速度梯度所能引起的湍动能;G为浮力影响所能引起的湍动能。
2 计算模型与边界条件
2.1 平台模型
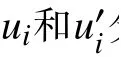
以某半潜式海洋平台模型为研究对象,其水下部分结构如图1所示,平台由2个浮体、立柱以及横撑等模块组成,主要结构尺寸如表1所示。
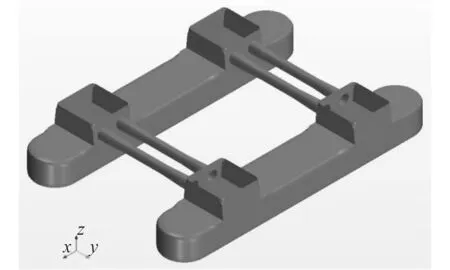
图1 半潜式平台水下部分示意图Fig. 1 Schematic diagram of underwater part of semi submersible platform

表1 平台模型主要结构尺寸Tab. 1 Main structural dimensions of platform model
2.2 计算域和边界条件
计算域和边界条件的设置如图2所示,计算域为正方体,长宽高分别为4 m×4 m×0.7 m。平台中心距离速度入口2 m,入口边界采用Velocity-inlet,出口边界采用完全发展出流边界条件Outflow,平台表面边界采用无滑移壁面边界条件,数值计算区域边界条件设置如图2所示。

图2 边界条件Fig. 2 Boundary conditions
2.3 网格划分
在划分网格时,将整个流域划分为若干区域进行网格划分,以此提高网格质量和控制网格数量,流场区域的网格划分如图3所示。为保证数值模拟精度,全域采用六面体结构化网格,平台壁面采用精细网格并保证第一层网格位于粘性底层内。半潜式海洋平台的轮廓特征线进行线控制,同时对平台表面设置面控制,并做好网格的光滑过渡。网格数约为196.8万个,半潜式海洋平台表面网格如图4所示。
图3 网格区域网格划分Fig. 3 Grid division of grid area
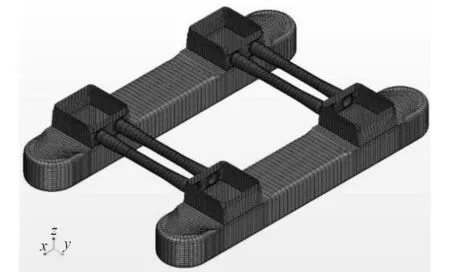
图4 半潜式海洋平台网格划分Fig. 4 Grid division of semi submersible offshore platform
3 计算结果及分析
3.1 模拟精度分析
为验证本文模拟的精度,对不同来流方向下的平台总阻力系数与相关试验结果进行对比,来流速度为1 m/s时对比如图5所示。可以看出,本文计算结果与试验值基本吻合,总阻力系数变化规律关于流向角度180°具有一定的对称性,总阻力系数在流向角度0°~60°时呈现上升趋势,总阻力系数在流向角度60°~75°时几乎不变,而75°~90°时总阻力系数略呈现减小趋势。
计算值与试验值的误差范围如图6所示,误差范围均在3%以内,流向角度为15°,60°以及165°时的误差值最小,仅为0.06%左右;流向角度为30°及45°时误差较大为2.53%和2.35%。总体来看,模拟结果在工程允许的误差范围内,表明本文方法精确有效。

图5 不同流向角度下阻力变化曲线对比图Fig. 5 Comparison of resistance variation curves under different flow direction angles
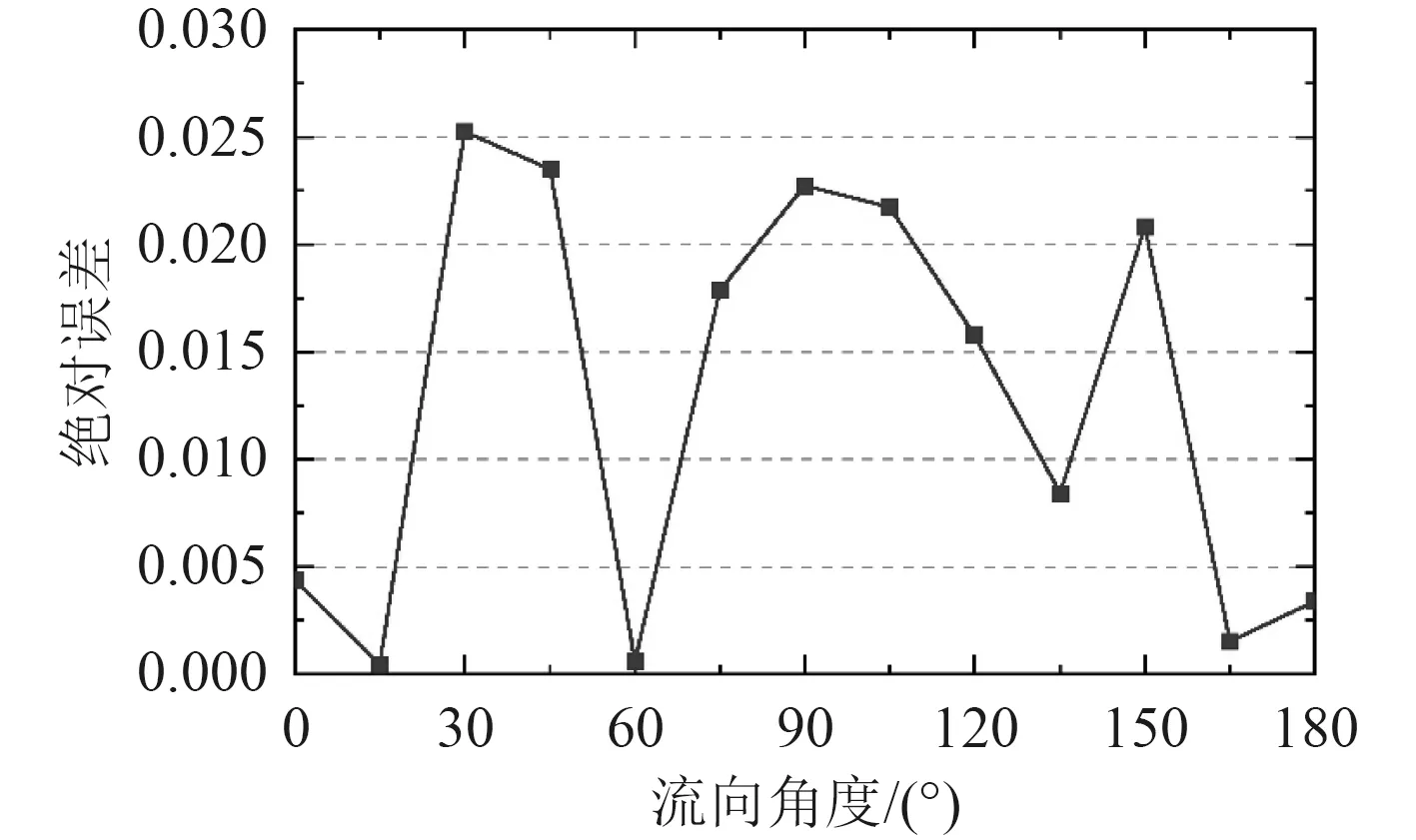
图6 误差范围Fig. 6 Error range
3.2 不同来流方向平台表面压力分析
图7为来流速度为1 m/s时不同来流方向下平台表面压力分布图,可见受水流撞击作用的影响,平台迎流面所受压力最大,平台以及立柱和横撑的背流面的压力较小,甚至表现为负压区域。当流向角度增大时,处于下游方向立柱所受阻力越来越小,这是由于随着流向角度增大,上游迎流方向立柱的尾流“屏蔽区”越来越大。当流向角度为90°时,“屏蔽区”达到最大,下游方向结构完全处于右侧浮体的尾流中,其所受压力明显小于上游迎流方向。
3.3 不同来流方向下的流载荷分析
图8为来流速度为1 m/s时不同流向角度下不同方向阻力变化曲线图。可知,方向阻力变化规律近似于余弦函数,阻力在流向角度0°~60°内减小速度较缓,在流向角度60°~90°内减小速度较快。
方向阻力变化规律近似正弦函数,阻力在流向角度0°~60°内增长速度较快,在流向角度60°~90°内增长速度较慢,当流向角度为60°时,方向阻力最大为50.38 N。方向阻力变化规律关于流向角度180°具有一定的对称性,且均为负压,这是由于平台在一定流向角度上迎流面积相似从而导致阻力变化曲线对称。当流向角度为0°~60°及90°~165°时,阻力随流向角度的增加而增加,当流向角度为60°~90°及165°~180°时,阻力随流向角度的增加而减小。

图7 不同流向角度压力分布图Fig. 7 Pressure distribution at different flow directions and angles
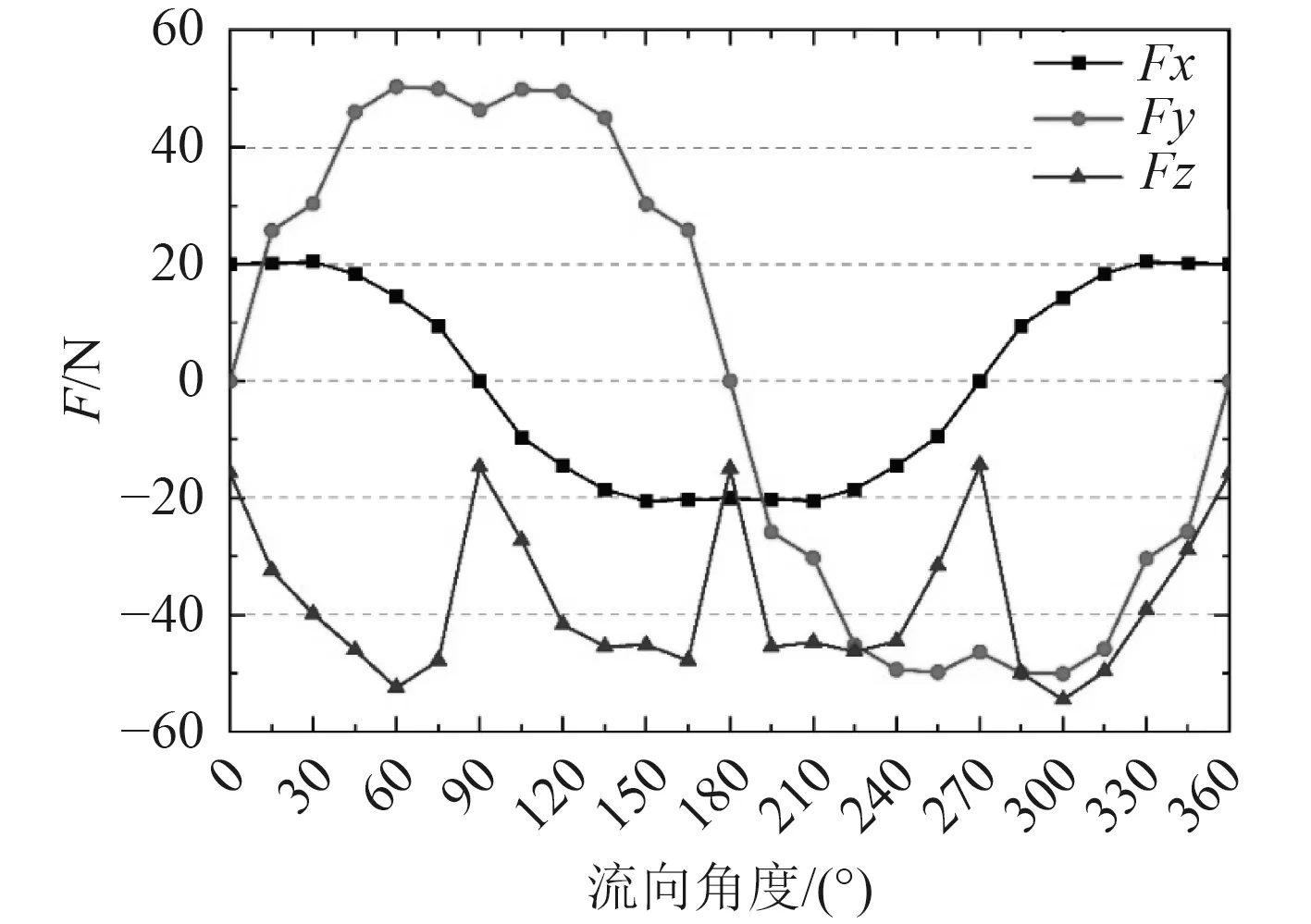
图8 不同流向角度下阻力变化曲线Fig. 8 Resistance variation curve under direction angles
3.4 不同来流速度下的阻力分析

图9 不同来流速度x方向阻力Fig. 9 x direction at different inflow speeds

图10 不同来流速度y方向阻力Fig. 10 y direction at different inflow speeds
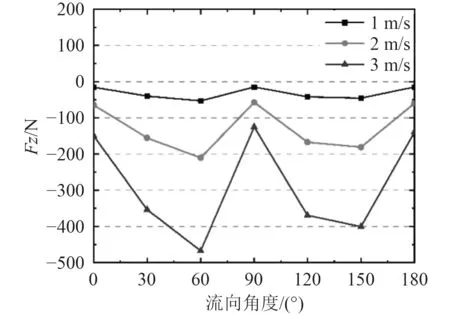
图11 不同来流速度z方向阻力Fig. 11 x direction at different inflow speeds

图12 不同来流速度阻力最大值Fig. 12 Max resistance at different velocities
图9~ 图11为不同来流速度下xyz方向的阻力,图12为不同来流速度下阻力最大值。由图9可知,不同流速下的方向阻力变化规律均近似于余弦函数,方向阻力的值域范围随着来流速度的增加而增加。当流向角度为90°时,方向阻力值均为0。由图10和图11可知,不同流速下的方向、方向阻力变化规律关于流向角度90°近似对称,流速越大,阻力越大。由图12可知,方向和方向的阻力最大值近似相等。
4 结 语
基于STAR-CCM+平台对不同流向角度及不同来流速度下的平台阻力和三维表面压力进行计算,并分析来流速度和来流方向对阻力及表面压力的影响。主要结论如下:
1)本文基于CFD数值模拟方法进行的数值分析有效,对半潜式海洋平台的阻力分析具有一定的参考价值;
2)-ε湍流模型对半潜式海洋平台阻力的预报偏差在2.6%以内;
3)半潜式平台所受阻力受“遮蔽”效应和迎流面面积的影响;
4)相同来流速度下,各方位阻力随流向角度增大规律各不相同;
5)相同流向角度下,阻力随着来流速度的增大而增大。
猜你喜欢
华人时刊(2022年13期)2022-10-27
汽车实用技术(2022年5期)2022-04-02
疯狂英语·读写版(2021年8期)2021-09-17
作文周刊·小学一年级版(2020年8期)2020-05-11
作文新天地(初中版)(2019年6期)2019-08-15
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年3期)2016-09-27
