景观水域智能清洁船设计
2022-10-19 06:59虎啸鸣萧友康陈云帆许佳楷
科技创新与应用 2022年29期
虎啸鸣,姚 嘉,李 坚,萧友康,陈云帆,许佳楷
(桂林电子科技大学 机电工程学院,广西 桂林 541000)
随着社会经济的发展和人民生活水平的提高,城市化进程逐渐加快,各城市人工景观水域与水生态修复建设工程不断涌现。但是景观水域由于各种原因往往会漂浮着一些水面垃圾,不仅造成视觉影响,还会引起水质恶化、水体异味等问题,违背了景观水域设计的初衷[1]。
景观水域需要的管理工作主要有漂浮的生活垃圾以及树枝树叶;由于水草的富营养化,水中还会有腐败的水草植物;更有诸如水面船舶漏洒的浮油等严重影响水质并产生异味的液体垃圾;人员工作量大,且需要定时反复清理,工作内容多,而目前市场上的水面垃圾收集船大都是大型船舶机械,主要应用于大范围大面积水域垃圾的收集,其结构复杂,体积庞大,价格昂贵,而且需要专业人士操作,无法匹配风景区等小型浅水水域的垃圾收集作业,人工方式回收一般为环卫工人手持网兜等工具直接把垃圾捞上来,然后,划着船到达下一处继续作业,劳动强度大,工作效率低,而且工人的安全得不到保证[2]。
1 整体设计方案
智能清洁船的主体尺寸为1 000 mm×600 mm×250mm,船体空载的重量约为3.7 kg,如图1 所示。其主要部分包括船体,金属输送带,收集装置,垃圾打包装置,垃圾储存仓,动力装置等。船体前部设计为前低后高,减轻重量方便放置金属传送链。船首有2 个高台,加高金属输送带的高度。船身偏置有1 个方型垃圾存储仓,用于存储收集到的垃圾。船尾有1 个平整的斜面和小平台,用于安装放置螺旋桨,尾部2 个螺旋桨对称放置,通过立式轴承座加紧固定螺旋桨的套筒,从而固定住螺旋桨。直流电机因其较高的性价比和稳定性广泛应用在各类型的机电系统中[3],螺旋桨采用12 V755 有刷电机,转速可达6 000 r/min,每个螺旋桨提供大约3 kg 的推动力。控制机构部分控制器主板采用Arduino 开发板。船体前部设计前置传感器为SR04 超声波测距模块,红外相位测距技术是对被测目标发射一个红外信号,然后接受目标反射回来的光信号,通过间接测量光信号的往返经过的时间,计算出目标的距离[4]。每个前置传感器前端安装有红外测距模块,优选型号为GP2Y0A02YK0F,用于避开淤泥堆积,坡度变化较小的河床。前置传感器的工作过程与现有技术中的超声波测距模块的工作过程相同。利用自动控制,实现清洁船在工作水域按规定路线巡游进行工作。
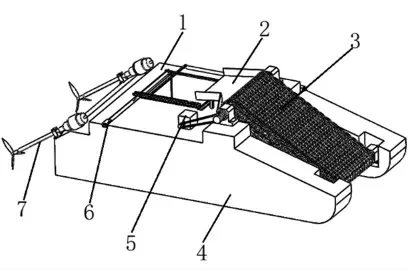
图1 清洁船整体图
2 机械结构实现方案
2.1 收集部分
小型水域清洁船的前部有金属传送带,如图2 所示,能够将水面漂浮物传送到收集仓,同时让收集物的水分通过金属传送带过滤进水里,只留下收集物。依靠带传动,稳定可靠。

图2 金属传送带
2.2 垃圾打包部分
当前,自动打包的垃圾桶大多采用的是热塑封技术,配套使用的垃圾袋为塑料的,密不透风的。小型水域清洁船的工作的地点为水域,收集的漂浮物,经过金属网链的沥水,仍会携带少量水分,塑料袋显然不适用于装载水面漂浮物。针对上述问题,垃圾存储仓内套着尼龙网袋,存储仓内有通道,能够使得积水流入水域,能够有效滤除水分,只留下收集好的漂浮物。
垃圾打包部分主要有外壳、卡槽、塑料推杆、电动推杆和滑轨等,如图3 所示。尼龙网带套在存储仓的外壳上,外壳内有电动推杆、塑料推杆等。当收集垃圾的工作完成,垃圾存储仓上纵向放置的电动推杆先向前伸出,塑料推杆的一端与电动推杆连接,另一端与滑轨上的塑料滑块连接,推动塑料条向前运动,而后横向放置的电动推杆再向前运动,推动塑料条将尼龙网袋聚拢到U 型槽口处。纵向电动推杆的头部有一铁片,推杆向前伸出,将聚拢尼龙网袋的同时,推动小铁片挤压放置于卡槽内的铝钉,铝钉的另一侧被挤压进入方型槽,铝钉受力变形,将铝钉扣在尼龙网上,实现尼龙袋放封口,完成打包工作,如图4 所示。

图3 打包封口机构

图4 铝钉卡槽部分
2.3 水质检测部分
景观水域一般都有人工饲养的鱼,水质的好坏关系到人工鱼的存活率,实时检测水质对于管理者是非常重要的。水面清洁船搭载现有的水质检测装置,与船体控制主板连接,随时反馈水域环境的水质,方便管理水域。
2.4 控制部分
控制系统包括控制器主板、信号接受器及自动巡航控制器等元件。事先预设好小船的行进路线,在行驶的过程中调成船的航行方向[5]。船使用螺旋桨作为推进器,将左右螺旋桨对称布置于2 个单体的尾侧,在其2个单体内部安装有2 个直流电机,可以实现船体的直行、转弯、停止等系列操作[6]。利用2 个螺旋桨电机的不同转速差,实现船体的转向,如图5 所示。

图5 差速转向流程图
2.5 水草收集装置
小型水域一般深度比较浅,适合水草生长,往往水草丛生。景观水域也需要种植水草以维护生态平衡[7],对于过长或者腐败的水草,如不及时清理,会导致水体发黑发臭,影响水质。小型水域清洁船搭配使用一种旋转水草收集装置,进行水草清洁工作。主要针对的是金鱼藻一类无根或者浅扎根的水草,利用其特性,用旋转搅动的方式将其缠绕于收集器上,收集器回缩将水草与河床分离,使其漂浮于水面,清洁船再进行收集工作。
水草收集装置主要包括:外壳、电机、丝杆、伸缩杆、刀片、缠绕爪、旋转盘等,如图6 所示。
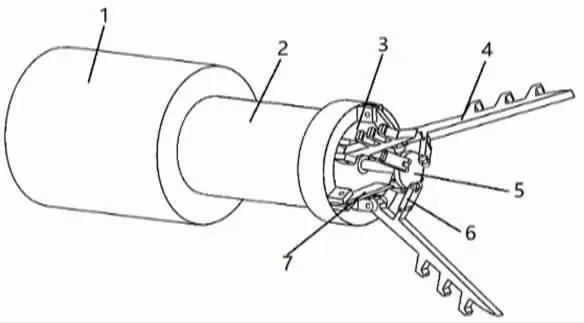
图6 旋转水草收集装置
当需要收集水草时,水草收集装置对准需要清理的区域,内置电机带动丝杆转动,带动伸缩杆(如图7所示)升高。二级伸缩杆从三级伸缩杆的内部伸出,先达到最大伸缩位置,缠绕爪及爪盘从收纳罩中伸出。丝杆继续转动,三级伸缩杆到达最大伸缩位置,三级伸缩杆伸出的过程中,将旋转盘升起,旋转盘通过3 根连杆与缠绕爪连接,连杆完全伸直达到最大伸直状态,缠绕爪张开到最大。外部电机带动水草收集装置旋转,将水草缠绕在收集装置的缠绕爪上。

图7 旋转水草收集装置杆组
旋转搅动水草的收集工作完成,内置电机带动丝杆反转,三级伸缩杆先缩回,带动连杆向下内缩,将缠绕爪变为收缩状态。继续转动,二级伸缩杆回缩,缠绕爪收回收纳罩。在缠绕爪收回收纳罩的过程中,收纳罩上方有3 片均布的刀片,能够切割缠绕于爪子上的水草,使其落入水中。完成整个收集动作,被缠绕起来的水草将漂浮于水面上,小型水域清洁船的收集部分将其收入尼龙网袋内。
3 结束语
景观水域智能清洁船适用于大多数人造景观水域等小型水域,能够实时检测工作区域的水质,根据不同水域的大小,设置巡航路线,清洁船按照路线巡航,自动收集漂浮物。能够减轻人工打捞水面漂浮物的压力,安全可靠有效提高清洁效率。主控芯片的稳定信号传输控制各个部分结构,保证了各个机构的协调配合,使其共同完成一系列复杂的任务,实现预期功能。
猜你喜欢
智慧少年(2022年7期)2022-06-24
汽车电器(2022年2期)2022-03-01
科学导报(2020年39期)2020-06-21
航空世界(2019年1期)2019-10-11
航空模型(2017年5期)2017-12-14
中学科技(2017年10期)2017-11-04
科技创新导报(2016年4期)2016-11-19
演艺科技(2016年9期)2016-05-14
发明与创新·中学生(2015年4期)2015-04-09