具有输入饱和的无人两栖平台路径跟踪
2022-10-25 11:59贾英新华玉龙田相轩
计算机仿真 2022年9期
贾英新,华玉龙,田相轩
(1.陆军装甲兵学院军政基础系,北京100072; 2.陆军航空兵学院无人机中心,北京101149; 3.陆军装甲兵学院信息通信系,北京,100072)
1 引言
对预定路径的准确稳定跟踪是无人装备顺利执行各种任务的基础,对路径跟踪进行研究具有重要的现实意义。文献[1-5]等研究了无人艇路径跟踪控制问题,考虑无人艇的前后不对称性,建立了非完全对称数学模型,在此基础上结合line-of-sight (LOS)导引律制定控制器实现了无人艇对预定路径的稳定跟踪。然而,与无人艇相比无人两栖平台的工作环境更加复杂恶劣,工作任务多样装具经常变换,使得平台模型参数摄动更加剧烈,现有控制律的鲁棒性难以满足要求。
此外,无人两栖平台的执行机构还存在输入饱和特性,即只能对一定范围内的输入进行响应,而对超出范围的输入无法响应,输入饱和特性进一步增加了控制器的制定难度。针对具有输入饱和特性的路径跟踪问题,文献[6-8]引入了饱和补偿辅助系统,通过对执行机构无法响应的部分进行估计补偿,改善了控制器的跟踪效果;文献[9,10]利用具有光滑特性的双曲正切函数和Nussbaum函数对饱和函数进行处理,保证了受限控制系统的稳定。这两种方法虽然都能够解决系统的输入饱和问题,但也存在控制器制定过程复杂、制定的控制器计算量大不易于工程实现等不足。
针对具有输入饱和的非完全对称无人两栖平台数学模型,本文提出了一种更为结构更为简单的基于干扰观测器的抗饱和控制方法。该方法将实际控制输入看作不受限的理想控制输入与执行机构无法响应的控制输入两部分的叠加,后者可被视为等效干扰并与模型不确定性及真实外界干扰一并应用干扰观测器进行估计和补偿。由于无需单独的辅助系统对饱和特性估计和补偿,因而简化了控制器的制定过程;饱和补偿与真实外界干扰补偿合二为一,也使得制定的控制器结构更为简洁,计算量小,易于工程实现。
2 无人两栖平台结构及数学建模
2.1 无人两栖平台结构
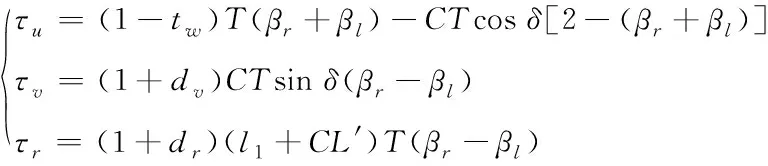
本文研究的无人两栖平台由某型两栖车辆改装而成,其结构简图如图1所示:两个卧式轴流喷水推进器以距离2l对称布置于平台两侧,推进器喷口(即水门)方向固定但大小可调;当水门逐渐关闭时多余的水经由倒车水道以角度δ向前喷出,当两侧水门开度不同时两喷水推进器产生不等的推进力从而形成转首力矩使得平台转向。在实际中通常将喷水推进器的纵向推力与水门开度之间的关系简化为线性,则由几何关系可得无人两栖平台的纵向推力、横向推力以及转首力矩分别为
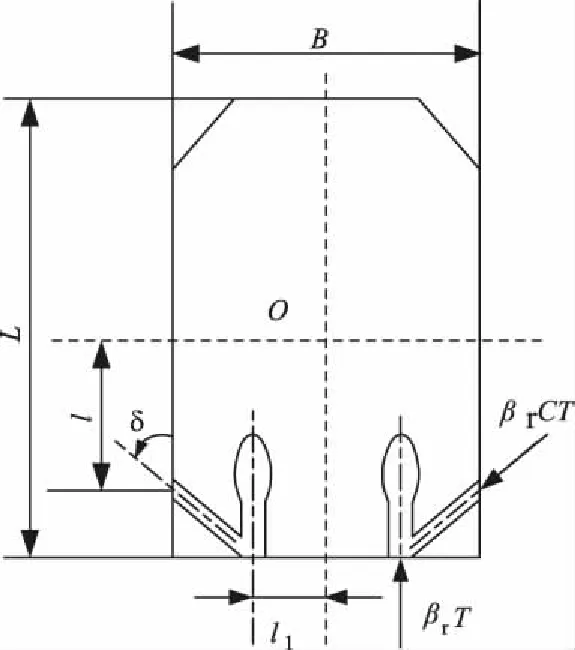
图1 无人两栖平台结构简图
(1)
式中:′=sin+(cos)2;和分别表示平台的总长和总宽;表示倒车水道出口至平台重心的纵向距离;和分别表示纵向和横向推力;表示转首力矩;表示反喷系数;表示推力减额分数;和分别表示喷水推进器对横向推力和转首力矩的影响系数。
将水门完全打开记为“1”,水门完全关闭记为“0”,则实际中水门开度可响应的范围为,∈[0,1];相应地,根据式(1)可知、、的可行范围为
min≤≤max,min≤≤max,
min≤≤max
其中,“·”与“ ·”分别表示“·”的最小值与最大值,且min=-2cos,max=2(1-),max=-min=(1+)sin,max=-min=(1+)(+′)。
由式(1)的第二、三式易知
=
(2)
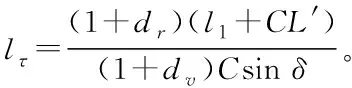
由于无人两栖平台的航行速度通常不高,和变化不大,因此可知近似为常数,即转首力矩与横向推力成比例关系;在船舶领域,由于大部分船舶的舵角是可调的,因而是变化的,这是无人两栖平台与船舶最大的不同,这一特性可使得无人两栖平台的控制问题得以简化。
2.2 非完全对称无人两栖平台模型
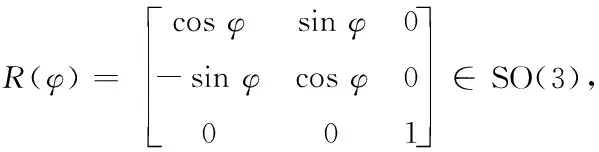
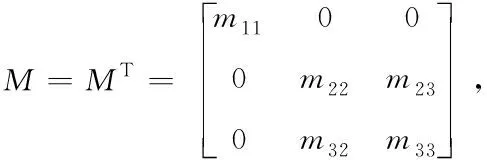
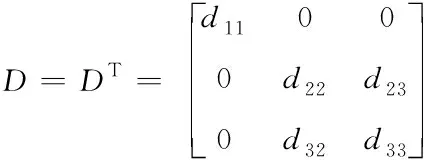
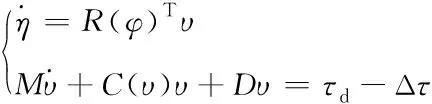
当无人两栖平台在水面上航行时,可将其视为特殊形状的船舶,忽略模型不确定性及外界环境的影响可建立无人两栖平台的平面三自由度数学模型为
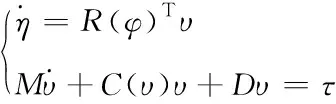
(3)
式中:=[,,]∈表示大地坐标系下的位置坐标和首向角,=[,,]∈表示随体坐标系下的速度;=[,,]表示实际控制输入;矩阵(),,()以及分别表示大地坐标系到随体坐标系的旋转矩阵、质量矩阵、科里奥利向心力矩阵、以及阻尼矩阵,其数学形式分别为

3 饱和控制输入转换
在工程实际中,执行机构往往存在位置、速度、以及加速度等方面的限制,当控制输入超过这些界限后就会使得执行机构陷入饱和,对于超出的部分则无法响应,进而影响系统的性能,甚至破坏系统的稳定性。但如果从最初设计阶段即将执行机构的饱和特性考虑在内则可在一定程序上避免饱和问题的发生。
由于式(3)中的控制输入为实际控制输入,则可知∈[,];引入一个理想控制输入∈,为不考虑执行机构饱和特性时求得的控制输入。与之前的关系为
(4)
式中:=[min,min,min],=[max,max,max]。
由于式(4)连续但不可导,可能使得执行机构出现冲击,为得到平滑的控制输入,借鉴文献[9]和[13],将式(4)用双曲函数代替

(5)

将式(5)代入式(3)可得
(6)
式中:Δ=-为执行机构无法响应的部分,称为等效干扰。
至此,执行机构的饱和特性对系统的影响已转化为等效干扰对系统的影响,接下来的任务是:设计控制器削弱等效干扰的影响,并且使得无人两栖平台的位置、速度信号收敛至预定值,即→,→,其中和表示预定路径的位置及速度信号。
注1:与文献[6-10]相比,本文对输入饱和特性的处理方法具有以下优点:
1) 将执行机构无法响应的部分视为等效干扰,在控制器制定过程中可与模型不确定性及外界环境干扰合并处理,无需单独引入辅助控制系统,简化了控制器的制定过程;
2) 在控制器设计阶段即消除了输入的限制,可方便利用现有智能算法进行控制器设计,提高了设计灵活性。
4 基于LOS导引律的控制问题转换
4.1 LOS导引律

()=arctan(′()′())
(7)
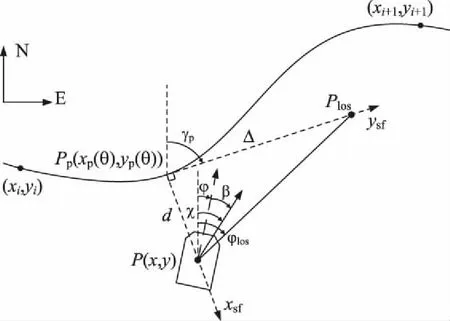
图2 LOS导引律示意图
本文主要对无人两栖平台的直线路径跟踪进行研究,对于直线路径而言,有


(8)
式中:为跟踪误差。
与现实中水手操舵类似,无人两栖平台在路径跟踪过程中应始终朝向点航行,因而无人两栖平台的期望航向角应为
=
(9)
式中,为参考航向角。
同时考虑到由于操舵以及外界环境的影响,无人两栖平台的横向速度不为零,即平台在航行中存在漂角,于是有
=+
(10)
式中,=arctan();为航向角。
因此,根据式(8)-(10)可知无人两栖平台的期望首向角为

(11)
式中,0≤Δ≤Δ≤Δ。
4.2 跟踪误差
路径跟踪误差由无人两栖平台在{}中的坐标来描述,即
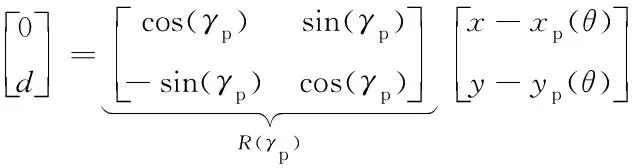
(12)
(13)

将式(12)展开可得:
=-(-())sin()+(-())cos()
(14)
对式(14)求导可得



(15)
根据式(6)、(7)、(12)及(15)可得无人两栖平台路径跟踪误差系统为

(16)
根据文献[14]的定理1可知:对于路径跟踪误差系统(16),在导引律(11)的作用下系统平衡点=0是一致半全局指数稳定()的。这说明导引律(11)可将无人两栖平台对期望位置的跟踪简化为对期望航向角的跟踪,因此,本文接下来控制目标可描述为:设计控制律使得无人两栖平台的航向角和速度信号收敛至期望值,即→,→。
5 控制器设计
在本节中,将应用反步控制理论设计两个全局一致渐近稳定控制器,在设计过程中一个忽略输入饱和的影响,记为,另一个考虑输入饱和的影响,记为。下面先对进行设计:
5.1 忽略输入饱和影响的控制器(M1)设计
定义航向角及速度跟踪误差分别为

(17)

(18)

令

(19)
式中:> 0为设计参数。可得

Step 2:忽略等效干扰Δ的影响,结合式(6)并对式(18)求导可得

(20)
注2:当忽略等效干扰Δ后,式(6)与式(3)形式相同,但两者意义不同:式(3)中的为有界的实际控制输入,而式(6)中的为任意连续的理想控制输入。
将进行扩展可得第二个Lyapunov候选函数
(21)
对式(21)求导可得:


(22)
令

(23)
式中:={,,}为待设计的正定矩阵。
将式(23)代入式(22)得:

根据式(5)及式(23)即可求得实际控制输入,制定完毕。
注3:的制定过程是目前普遍采用的,即:
1)忽略输入饱和的影响,即假设是理想的不受限的控制输入(本文以表示),基于LOS、SF等导引律应用backstepping、滑模变控制等算法求出此理想的不受限的控制输入;
将理想控制输入通过饱和函数或双曲函数得到最终实际控制输入。
5.2 考虑输入饱和影响的控制器(M2)设计
在本节中将对考虑输入饱和影响的控制器()进行设计。的设计过程与相同,只不过由于考虑输入饱和的影响使得理想控制输入变为

(24)
当系统存在模型不确定性及外界干扰时,一般采用自适应算法或观测器来进行估计和补偿,线性状态扩张观测器将干扰项视为一个新的状态,将状态空间由二维扩展至三维,通过状态空间的求解实现对干扰项的估计和补偿,目前已在船舶、机器人、航空航天等领域得到了广泛的应用。借鉴文献[15,16],本文采用线性状态扩张观测器来对等效干扰Δ进行估计和补偿。

(25)

联立式(24)与式(25)可得

(26)

为分析方便,首先记式(26)中的前四项为

(27)
不失一般性,只对超出上界的情况进行分析。当与使得执行机构陷入饱和后,系统将经历以下4个阶段
1)≥,与都使得执行机构陷入饱和,即实际控制输入都为=,则实际控制输入对无人两栖平台做的功相等,即=;而对于超出上限部分执行机构无法响应,能量损失分别为Δ,Δ;
2)<,≥,没有陷入饱和,陷入饱和,则实际控制输入=>,有>,其中-即为对阶段(1)中Δ的部分补偿;


综上,当执行机构陷入饱和后,由于具有饱和补偿功能,且在前三阶段做功更多,可使得无人两栖平台的状态响应速度更快。
5.3 稳定性分析
由于式(23)与式(26)中的尚未确定,控制输入无法求出,下面对进行设计。考虑到路径跟踪的控制目标之一是使无人两栖平台的速度跟踪预定速度,并且根据式(18)可知当→0时有→,因此可令=。
联立式(2)与式(26)可得:

(28)

综上,即完成了考虑输入饱和影响的无人两栖平台路径跟踪控制器设计,总结控制器制定过程可得如下定理:
证:定义观测误差为
(29)
选取Lyapunov候选函数为

(30)
将式(30)沿着式(25)求导可得

(31)
6 数值仿真
本文所研究的无人两栖平台是在某型两栖战车的基础上改装而成的,其主要参数为
=1494


基于Matlab编写程序并进行仿真,结果如图3至图7所示。
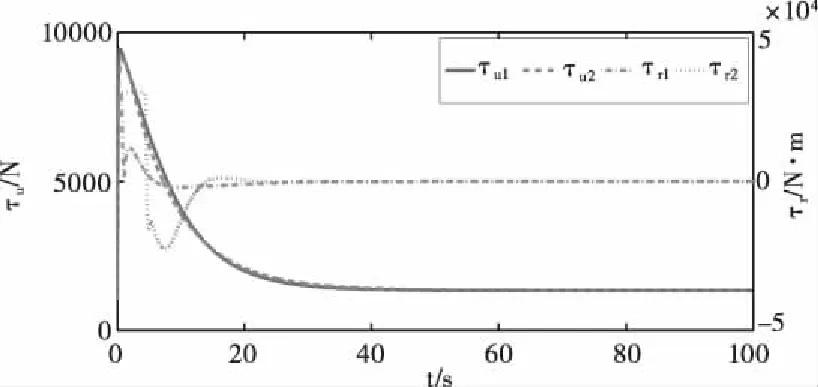
图3 控制输入时间响应曲线对比
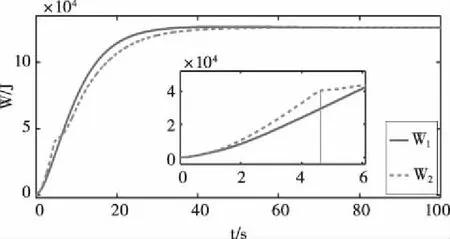
图4 控制输入做功曲线对比
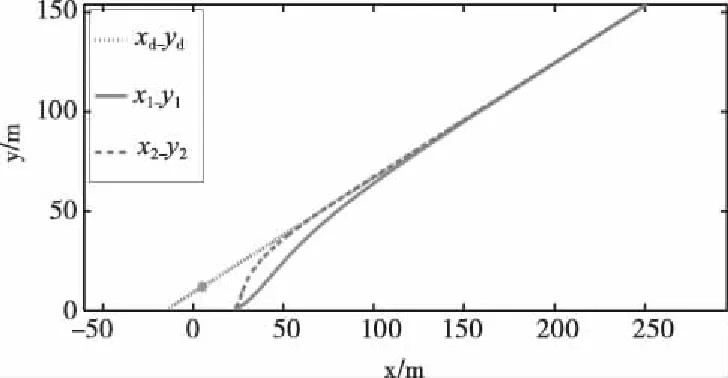
图5 无人两栖平台轨迹曲线对比
如图3所示为控制器与控制输入时间响应曲线对比,由于与存在比例关系,因而图中只列出了的时间响应曲线。由图可知纵向推力未能使执行机构陷入饱和,观测器未对其进行饱和补偿,因而图3所示的两条纵向推力曲线差别不大;但由于差别比较大,导致无人两栖平台状态响应不同,因而曲线不会完全重合。由图3中曲线可以看出:在仿真初始时刻及便都使得执行机构陷入饱和,0-040为饱和补偿第1阶段,040-410为饱和补偿第2阶段,第410-462为饱和补偿第3阶段,由第52节理论分析可知,饱和补偿前三个阶段所做的功应该比大,如图4所示为实际控制输入的做功曲线,由图可知(462)=29600,(462)=40400,>,说明了前文理论分析的正确性;此外,由于与的纵向推力差别不大,由此可知在0-462阶段内控制输入做功的差值主要由及产生,因此可推算出在此阶段内控制下无人两栖平台首向角的变化应该比大,如图5所示为无人两栖平台轨迹曲线对比图,由图易知在作用下平台的首向角响应比快,无人两栖平台以更快的速度收敛至预定路径,说明了前面分析的正确性。
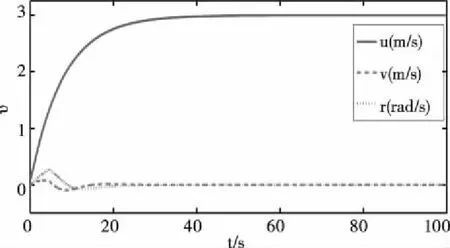
图6 M2作用下无人两栖平台速度曲线
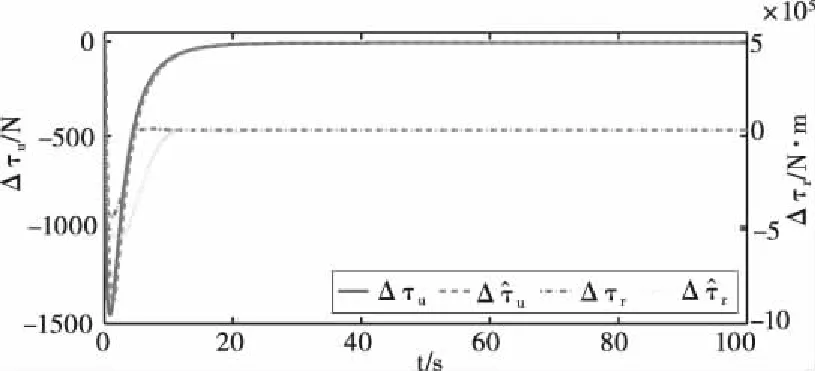
图7 状态扩张观测器对等效干扰的观测结果
图6与图7所示分别为作用下无人两栖平台速度曲线以及状态观测器对等效干扰的观测效果,从另一方面说明了可有效实现无人两栖平台对预定路径的稳定跟踪。
7 结论
本文研究了输入饱和影响下的无人两栖平台路径跟踪控制问题,得到了以下3点结论:
1) 对实际控制输入进行转换,将其分解为不受限的理想控制输入和执行机构无法响应的控制输入两部分,并将执行机构无法响应的部分视为等效干扰,此等效干扰可与真实外界干扰及模型不确定性合并处理,有效简化了控制器的制定过程;
2) 经过实际控制输入转换,可将原系统视为不受限的理想输入控制下的标称系统受到等效干扰的影响,针对此干扰影响下的标称系统可应用多种方法进行控制器设计,增加了控制器设计的灵活性;
3) 基于标称系统文中应用LOS引导律及反步控制设计路径跟踪控制器,并应用干扰观测器对等效干扰进行估计和补偿,有效解决了路径跟踪控制问题。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
军民两用技术与产品(2021年2期)2021-04-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
农业技术与装备(2020年1期)2020-03-04
小哥白尼·趣味科学画报(2019年12期)2019-02-28
北京航空航天大学学报(2017年6期)2017-11-23
岷峨诗稿(2017年4期)2017-04-20
科学大众(中学)(2016年8期)2016-05-14