
数字孪生仿真与调试实训平台的设计
2022-10-25 08:42郭联金东莞职业技术学院智能制造学院陈泽群广州高谱技术有限公司
智能制造 2022年5期
文/郭联金,周 晶 东莞职业技术学院智能制造学院 陈泽群 广州高谱技术有限公司
近年来,制造业不断往数字化、网络化、智能化方向发展。机电装备的设计、制造和调试的复杂度也随之增加。设备产品的设计缺陷容易导致难以预测的运行故障,故复杂机电设备的研发成为当前智能制造的重点和难点。据统计,机电装备从研发到进入市场,系统缺陷及错误修正所耗费的时间,占据高达70%的生产周期。传统机电产品的开发是一个多级串联、逐级递进的过程,如图1所示。在工程设计阶段,机械、电气、自动化各部分的设计顺序和执行相互独立。由此使得机械产品的设计周期长,问题修正次数多,研发成本高。数字孪生将多学科协同,对物理对象的特征、行为、性能等进行数字化描述和建模,通过虚拟方式实现产品的调试和验证,是一种高效、环保的产品开发技术。

图1 数字孪生技术有效缩短产品开发时间
随着智能制造的转型和升级,培养适应未来产业的数字化人才尤为重要。未来的制造业高端技术技能人才不仅要掌握传统的机械、电气、自控系统的设计与装调,还需具备工业组网与通信、数字化设备设计、数字化产线运行与监控等各种新技术的运用能力。针对工业自动化流水线装配分拣的典型应用场景,研发了一套数字孪生应用平台。该平台集成西门子主流软硬件,提供机电一体化概念设计解决方案。综合利用UG NX、TIA Potal(简称TIA)、PLCSIM Advanced(简称PLCSIM Adv)等多平台,开展机械、电气、自动化、多学科协同设计,并通过平台接口和以太网通信进行全过程数据交互,可实现“以实控虚”“以虚控实”,对PLC 程序设计的正确性和机械结构的合理性进行调试和验证,优化装备设计。以此平台作为数字孪生应用示范教学平台,有助于培养具有数字化设计能力的新技术复合型人才。
1 平台基础环境
1.1 NX MCD
西门子UG NX软件集成了CAD/CAM/CAE多功能模块,可用于三维建模、模具设计、运动仿真、电气布线等场合。MCD是NX在“工业4.0”背景下新增的子平台,支持机电一体化产品概念设计,借助外部接口的易互联性,将机械、电气、自动化多领域协同集成,形成强大的机电一体化概念设计体系。可用于3D建模和仿真,提供机电设备设计过程中的软件在环、硬件在环仿真调试。通过虚拟设备模型与PLC连接,可对产品运行的可靠性进行虚拟调试和验证。
1.2 TIA Portal
TIA Portal是西门子公司在“工业4.0”背景下推出的全集成自动化工程组态平台。TIA V15以上版本的软件平台将自动化项目的关键组件进行了集成:S7-1500 PLC高级控制器,人机界面和伺服、变频器驱动系统。提供了标准化的工程理念,使用户可高效配置,编程调试和诊断,快速、直观执行自动化和驱动任务。借助高效能仿真工具、分布式IO和开放性接口,与其他平台相连,共享数据,易于构建数字双胞胎。
1.3 PLCSIM Adv
PLCSIM Adv是针对S7-1500系列 PLC推出的一款高性能PLC仿真器。与传统的PLCSIM仿真工具相比,它是以面板的形式独立运行,除了提供内部访问接口(Softbus),可以仿真运行PLC程序外,还能通过外部网卡实现TCP/IP实时仿真通信。此外,还支持运动仿真、多软件联合仿真、过程诊断,可创建高达16个PLC实例。
1.4 通信连接
OPC UA是工业4.0中一个重要的通信协议,用于分布式控制系统中各级别工业设备(不同协议和平台)的相互通信。它将物理设备、传感器、电机等形成数字化模型对象,供不同软件访问。OPC UA提供了一致、完整的地址空间和服务模型,支持Windows应用程序与现场自动控制应用软件的信息交互,使得同一系统的信息可以统一方式被访问。
PROFINET是新一代基于工业以太网技术的自动化总线标准,主要用于现场设备(使用PROFINET IO)的直接连接,具备实时、开放、灵活的优异性能。它使用组件化的设计,支持分布式自动化控制方式。OPC UA与PROFINET两标准相互促进、相互补充,确保底层自动化环境与应用层IT环境数据的无缝垂直通信。
2 平台结构与功能
2.1 平台的系统结构
针对智能制造产线常见的自动装配分拣单元,设计如图2所示的数字孪生应用平台。该平台用于工件的装配、分拣及包装。其主体结构由供料单元、传送单元、装配单元、分拣单元、物料仓储单元、操控单元组成。以S7-1500T系列PLC作为自动化系统的核心控制器;变频系统以G120变频器驱动传送单元的交流电机,带动皮带传送工件;采用V90伺服驱动套件控制装配单元的XY丝杆滑台精密运动,配合气缸完成拾取物料和装配;HMI用于系统运行状态监控;外围IO设备由按钮、传感器、指示灯、电磁阀等构成。PLC通过路由器,采用PROFINET通信标准与变频系统、伺服系统、HMI进行数据交换。工业PC机作为上位机和机电一体化概念设计平台,通过以太网连接Web服务器和小型客户端。
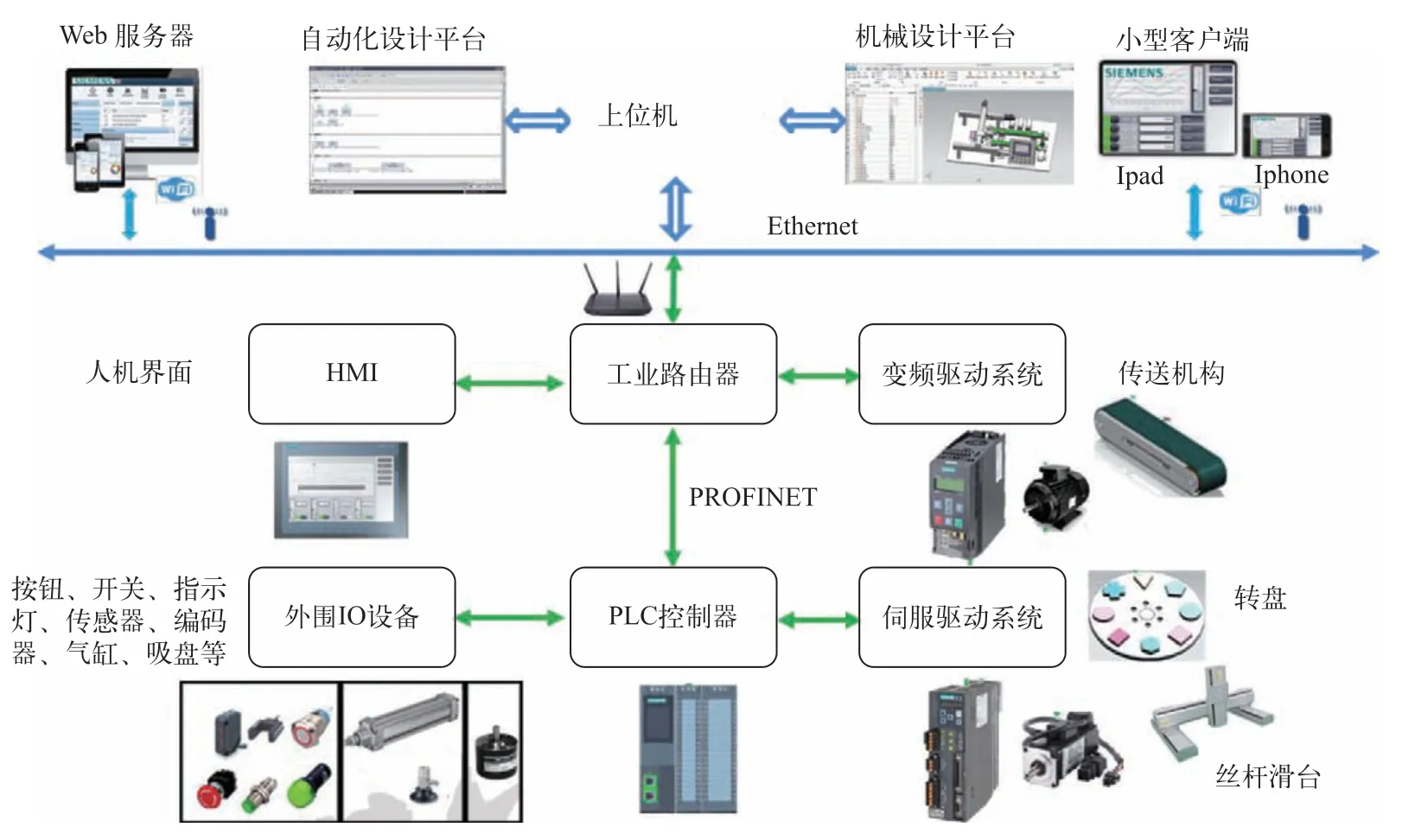
图2 自动化装配分拣系统的结构框架
2.2 平台实现的功能
数字孪生是通过全过程数字技术实现物理信息的融合。按照数字孪生五维模型结构,平台从物理实体、虚拟模型、数据信息、集成连接、服务支持五个维度来构建应用场景。其功能关系及实现原理如图3所示。首先,以MCD-TIA作为数字样机建模、电气设计、自动控制编程与仿真的集成平台,通过软件在环方式可开展虚拟仿真与调试,优化模型和程序设计。然后,采用真实PLC采集实体设备平台的传感信号,并使用已经过虚拟调试验证的程序驱动电磁阀、电机、指示灯等执行机构,控制实体设备正常运行。最后,借助真实PLC与集成平台的接口,通过变量链接和以太网通信,实现虚实数据交互,通过硬件在环以实控虚、以虚控实、虚实联调。
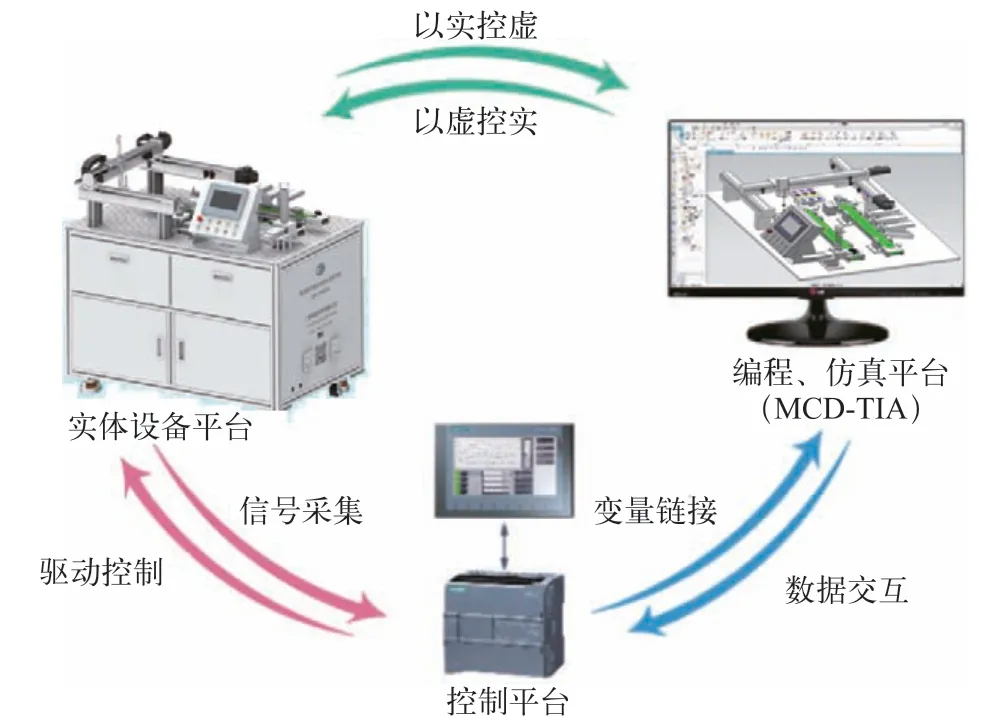
图3 数字孪生平台的功能及原理
(1)虚拟仿真与调试
1)MCD虚拟环境构建。①构建几何模型。根据装配分拣装备的功能需求、控制逻辑,利用NX进行3D建模或从部件库中进行构件选型,装配完整的虚拟样机模型,设计虚拟场景。②定义物理属性。分析组件的受力和运动情况,定义刚体、碰撞体、对象源等对象属性;添加铰链副、滑动副、齿轮副等运动形式;设置速度、位置控制等运动控制参数。③分配测控信号。添加执行器与传感器,为虚拟模型的运行设定传感信号与驱动元件。④设计仿真序列。利用信号触发及动作执行的逻辑关系,设计基于时间或基于事件的仿真序列,控制对象的运行时间与流程。⑤配置交互信号。创建MCD与外部TIA交互的信号,以实现MCD中虚拟模型与TIA中变量的链接,使PLC程序控制虚拟模型运行。
2)TIA自控环境搭建。①设备组态。添加硬件设备,选择S7-1500T PLC、添加与实体设备对应的DI/DO模块;组态2个V90 PN伺服驱动器、2个G120变频器、1个KTP700触摸线。采用PROFINET通信方式,将上述电气元件进行网络组态,分配IP地址。②程序设计。按照工作任务要求,分配PLC的I/O地址,设计变量表;根据样机模型的控制逻辑要求,设计控制程序,包括自动、手动、复位等不同运行模式。③HMI设计。在TIA的画面设计中,设计开机登录界面、自动操作界面、手动操作界面、故障报警界面。
3)MCD-TIA接口设置与虚拟调试。①添加虚拟PLC。通过PLCSIM Adv高级仿真器创建虚拟PLC实例,启动仿真,执行TIA中下载的控制程序。②通信设置。在MCD中通过“PLCSIM Adv”接口对TIA程序变量与MCD模型信号进行信号配置和映射,实现MCD-TIA两者的变量链接。③仿真调试。启动TIA-MCD仿真,将PLC和HMI均转至在线。在自动、手动、复位模式下观察虚拟模型的运行情况,验证程序的正确性、稳定性。通过仿真和调试修正错误,优化程序和参数。
(2)实体设备调试
在TIA中完善工艺轴的设置,优化伺服变频的运行参数,取消虚拟PLC、虚拟轴等仿真相关的设置。使用已经验证的程序和HMI,并下载至真实PLC硬件中,对程序进行实体运行验证。根据传感信号的状态,调整传感器的灵敏度、检测距离;根据气缸的动作,调整节流阀的流量。根据皮带的运行状况,利用Startdrive组件进行变频器驱动的配置和参数设置。由丝杆滑台的运行情况,应用软件V-ASSISTANT对V90伺服驱动进行优化调试。通过硬件调试和参数适配,使硬件平台按任务要求正常运行。
(3)虚实联调
使用经过硬件设备调试的PLC程序,将真实PLC与MCD虚拟平台通过OPC UA通信达到数据交互。
1)通信设置。在TIA中启用OPC UA服务器并设置地址,激活许可;将MCD的外部信号接口改为OPC UA接口,并输入服务器的URL地址,通过OPC UA服务器访问S7-1500 PLC的变量;将变量与MCD信号映射连接,就建立了真实PLC与虚拟模型的数据交换。
2)以实控虚。虚拟模型的执行信号均来自硬件PLC,故在MCD中屏蔽各种传感器的输出信号,仅接收PLC发过来的控制信号。虚拟模型将跟随实体设备的运行时序、逻辑动作。
3)以虚控实。将实际设备的传感器信号进行屏蔽,仅使用MCD模型的虚拟传感信号。此时,PLC硬件程序的输入来自MCD模型的传感器,PLC的输出同时驱动硬件设备和虚拟模型,实际设备将跟随虚拟模型运行。
4)虚实同步运行。在MCD中调整真空吸盘、按键等仿真序列的时间,调整伺服驱动、变频驱动的运行参数,可使虚拟模型和实体设备的运行时序、逻辑动作协同一致,达到虚实同步,如图4所示。
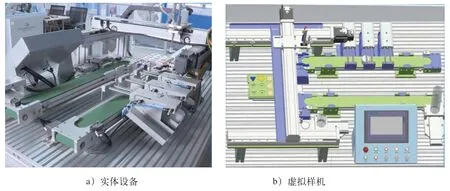
图4 装配分拣装备及数字孪生体虚实同步运行
3 平台的教学应用
3.1 实训环境布置
考虑理实一体化教学的特点和需要,数字孪生实训室的区域布置如图5所示。实训室中央为数字孪生体设计、编程、调试区,两侧为实体硬件调试与验证区。教学设施配置:数字孪生应用技术实训平台设备共8套;高配置虚拟仿真计算机(工作站)48套;6工位小组围坐式桌椅8套;虚拟仿真训练资源包(12个应用场景);多媒体教学系统1套(高速以太网交换机)。
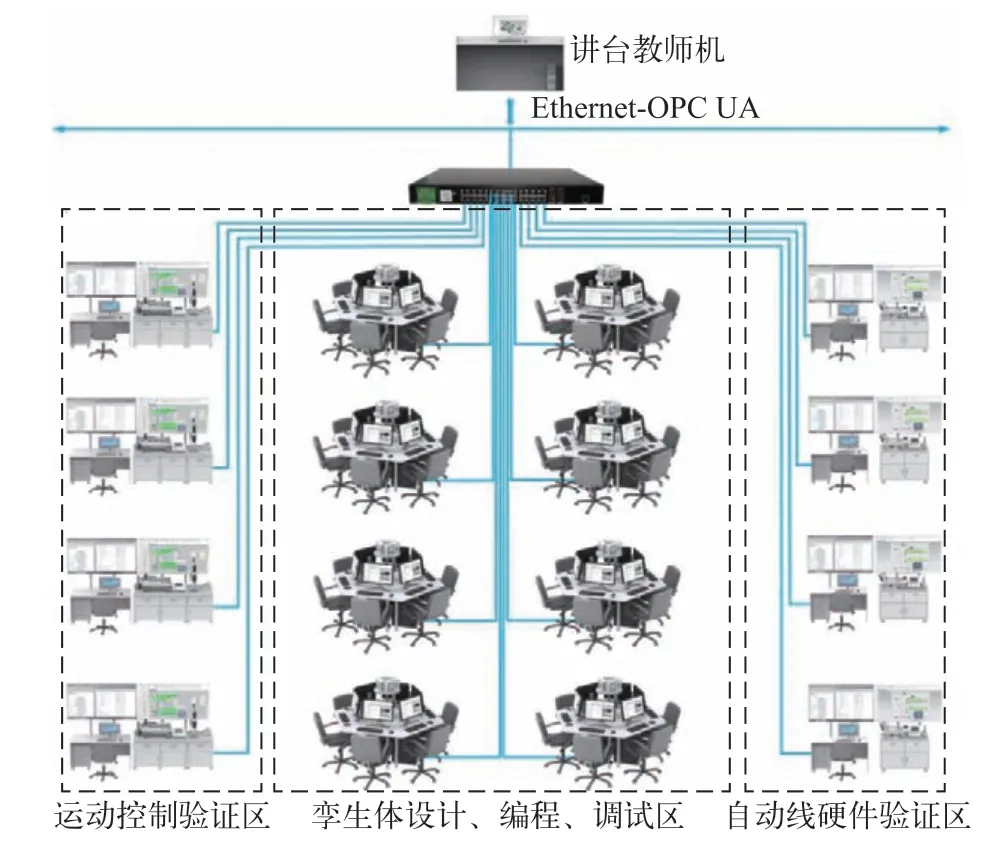
图5 实训场地布置
3.2 教学项目设计
基于孪生平台的硬件实体,按照功能模块(机械、电气、运动控制、通信等)和知识、技能点,共设置26个教学项目。
1)机械设计模块:①机械结构认知与MCD建模;②MCD的刚体,传动副等属性设置;③MCD的信号与接口设置;④MCD的物理特性属性设置;⑤MCD虚拟仿真和调试。
2)电气设计模块:①TIA博途编程软件认知;②传感器认知与应用;③外部设备I/O分配与变量表设计;④电气硬件连接与网络组态;⑤开关、传感信号采集控制;⑥开关量输出控制;⑦模拟电压采集与输出控制;⑧编码器高速脉冲输入采集控制。
3)运动控制模块:①变频系统参数设置与编程调试;②伺服系统参数设置与编程调试;③PLC高级运动控制(同步运动、凸轮运动、插补运动)。
4)通信与界面设计:①PLC的PROFINET/OPC UA/Modbus/自由口/ UDP、TCP/IP等通信控制;②HMI界面组态、报警功能、配方功能、动画设计。
5)虚拟仿真模块:①PLCSIM、PLCSIM Adv的应用;②SIMIT(unit)驱动行为仿真的应用;③MCD虚拟模式运行与调试。
6)综合联调:①系统控制程序设计;②系统HMI设 计;③系统虚拟仿真和调试综合;④机电一体化硬件系统综合联调;⑤虚实一体化联调。
实训教学时,采用虚实结合的方式,先是以平台组成单元为载体,开展操控单元、瓶身瓶盖供料单元、供料传送单元、分拣传送单元、物料分拣单元、丝杆运动控制6个子单元的仿真及调试训练。然后针对整机开展系统联调训练。
3.3 教学效果
1)提高了学生机电一体化的综合设计与实践能力。平台集成了传感器检测、气动控制、伺服驱动、变频驱动、触摸屏监控、以太网通信等多项工业自动化当前使用的核心技术、新技术,使学生多层面锻炼机械设计、电气设计、自动控制等多学科交叉的应用能力,适应未来智能制造对数字化、复合型技术技能人才的需求。
2)推动教学内容和模式的创新。由于数字化孪生系统与真实设备的一致性,教学内容可以虚实结合,也可虚实分开,而不受限于硬件设备。故借助数字化孪生的“软”平台,“教”和“学”将不再受限于时间和地点,通过远程即可开展线上学习和实操仿真训练。在类似新冠肺炎疫情导致无法开展现场教学的情况下,可发挥重要作用。此外,以MCD-TIA平台为基础,可设计各种部件放在重用库中,组合、装配成各种设备模型。由此可创生出灵活多变的教学项目,有利于根据学习对象的学情开展分层次、个性化教学;也有助于培养学生的创新设计能力。
3)减少实训耗材与实训设备维修工作。受限于经费与场地等因素,目前各校用于机电自动化方面的实训设备往往不足,难以满足普通教学班(30~50人)的使用需求;且因学生的熟练程度不一致,容易导致电气元件损坏及设备故障,严重影响教学效果,也让教师疲于应对设备调试与维护。数字孪生应用平台可以帮助学生在虚拟环境中完成设备的机械建模、PLC 编程调试任务,提高程序正确率,降低设备故障。教师可以有更多的时间及精力用在核心技术点的有效指导上,提升教学效能。
4 结束语
基于NX MCD和TIA的集成式系统工程环境,采用机电一体化概念设计方案,搭建了装配分拣系统的数字孪生应用平台。通过概念建模和基于物理场的仿真,借助以太网通信和软件接口的变量链接可实现设计建模、仿真优化和实例化验证。该平台作为数字孪生技术的示范应用教学平台,有助于培养适应未来智能制造的数字化、网络化、智能化复合型人才。由于MCD-TIA的基础环境与硬件易相映孪生,且与其他孪生平台易交互集成,本装配分拣平台还可以灵活扩展。如增加工业机器人、数控机床等设备,形成更为复杂的智能制造产线孪生体。或与MATLAB等软件交互,通过数据分析、处理和数学建模,优化机件设计与运动控制,进而研发更复杂、精密的机械装备。
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
电子制作(2018年12期)2018-08-01
创新作文(5-6年级)(2018年11期)2018-04-23
制造技术与机床(2017年6期)2018-01-19
电子制作(2017年19期)2017-02-02
南风窗(2016年19期)2016-09-21
当代化工研究(2016年6期)2016-03-20
小天使·六年级语数英综合(2014年3期)2014-03-15
