
一种基于商用车的自称重算法研究及实现
2022-10-27 06:50李娜,杜彬,田彬
汽车电器 2022年10期
李 娜,杜 彬,田 彬
(陕西重型汽车有限公司,陕西 西安 710200)
随着汽车电子行业的迅速崛起,车辆自称重问题得到了众多研究学者的关注,其计算精度能够直接影响到汽车的整车控制。现有车辆自称重算法都是基于电驱动车辆的,利用电驱动车辆纵向驱动力准确、信号响应及时等特点,提出的自称重算法鲁棒性好、收敛速度快、估计准确。商用车相较于电驱动车信号响应速度慢,存在延迟,因此,基于商用车的自称重算法误差较大,且不稳定,现有商用车称重大多借助称重装置来实现。
本文针对商用车自身特性,提出一种适用的自称重算法。该算法首先利用高频率波将商用车质量和坡度进行解耦,然后提取局部极大值来进行计算,最后使用最小二乘法获取整车质量的估值。
1 商用车质量估计
1.1 积分法计算商用车车重
车辆在行驶时,仅考虑车辆在纵向上的受力情况,简化力学模型,假设车辆所受力均作用在质心处,因此,车辆纵向的运动学方程为:

车辆纵向驱动力模型如下:

式中:T——发动机扭矩,Nm;i——变速器传动比;i——主减速器传动比;η——传动系的机械效率;r——车轮半径,m。
滚动阻力模型如下:

式中:f——滚动阻力系数,并且f=f+3.6 f·v,f=0.0076,f=0.000056。
车辆所受重力沿坡道方向的分力模型为:

式中:α——道路坡度角。
无风条件下,空气阻力模型为:

式中:C——空气阻力系数;A——车辆迎风面积,m;v——车辆纵向速度,m/s。
车辆加速阻力模型为:

式中:δ——汽车旋转质量换算系数,一般通过查表获得;m——车辆质量,kg;a——车辆纵向加速度,m/s。
将车辆纵向运动学模型离散后可得:

实车CAN报文中扭矩和发动机转速是同一条报文发出来的,该报文的发送周期为10ms,车速的报文发送周期为50ms,因此,使用发动机转速来表示车速值。

通过CAN报文中的扭矩百分比乘以参考扭矩得到商用车的扭矩,然后再根据式(2)得到车辆的纵向驱动力。扭矩的获取本身就存在很大误差,同时,在算法的运行过程中算法的计算均使用扭矩的稳态值,从而引起误差的进一步增大。
并且,式(6)中加速度信号是通过对速度信号进行微分得到的,车速信号通过CAN报文获取,本身就存在误差,进一步微分导致误差放大,影响算法的计算精度。
其他信号的获取均存在一定的误差,这些误差将导致该运动学模型在计算中不断积累误差,大大降低该算法模型的计算精度。因此,采取对该运动学模型进行积分处理,对误差进行均值处理,从而减少算法中的误差积累。
由于道路坡度角度很小,因此,提出道路坡度i用以表示道路坡度高度与底长之比,即i=tanα≈sinα,则式(4)可以表示为:

综上,商用车的纵向动力学模型可以表示为:

对上式等式两边分别乘以v,并且分别进行时间积分,可得:

假设t时刻的车速为v,t时刻的车速为v,由于t和t时间间隔很小,根据微积分原理,则:

综上,式(12)可表示为:
1.2 递归最小二乘法
递归最小二乘法(Recursive least squares,RLS)的基本思想就是新的参数估计值由旧的参数估计值和修正项相加得到,每获取一次观测数据就进行一次参数修正,随着迭代次数的增加,辨识结果越来越接近真实值。RLS可简单总结为:新的参数估计值=旧的参数估计值+修正项。
时不变单一输入单一输出的系统数学模型为:

系统的输入为u(k),输出为y(k)。为得到参数a和b的估计值,则可得到下面的向量形式线性方程组:


易得k-1时刻和k时刻的系统参数估计结果分别为:

假设在k-1时刻已经计算得到参数估计值,k时刻得到新的观测数据向量Φ和y,参数估计值和观测数据分别表示为:
最小二乘法的使能条件为以下几点。
1)制动信号输出值为0,即没有踩制动踏板。
2)车速值大于0。
3)为了提高算法计算结果精度,当自动挡配置商用车挡位处于4~12挡之间时,进行最小二乘法模块使能;当手动挡配置商用车挡位处于5挡时,使能最小二乘法模块。
4)上述条件均满足的次数,即最小二乘法使能条件置1的次数小于根据实验所得的迭代次数。
2 实验验证
本文使用手动挡商用车进行算法测试,用以验证本文所提算法的准确性以及有效性。
由于手动挡配置的商用车无法发送挡位信息,无法通过挡位信息来匹配当前数据的变速器速比。通过查阅资料,可知变速器的速比定义为变速器的速比为主从锥齿轮的比值,即从动锥齿轮齿数与主动锥齿轮齿数的比值,也可表示为变速器的输入轴转速(发动机转速)与变速器的输出轴转速的比值。
本文使用Canoe回放报文给MicroAutoBox,使用MicroAutoBox显示算法运行过程,以5挡和6挡为例演示自称重算法运算结果。图1a和图2a分别表示手动挡5挡和6挡发动机转速与变速器输出轴转速的比值和真实变速器传动比的对比图。图1b和图2b分别表示手动挡处于5挡和6挡时算法中计算的变速器传动比与真实值之间的差值绝对值仿真图。其中,5挡的真实变速器传动比值为7.09,算法估算结果与真实值的差值在0~0.3之间,对算法结果影响不大,可以用估算结果来代替变速器传动比的真实值。6挡的真实变速器传动比值为5.90,算法估算结果与真实值的差值在0~0.25之间,对算法结果影响不大,可以用估算结果来代替变速器传动比的真实值。从而解决了手动挡无法获取变速器传动比这一问题,使得该算法能够适用于手动挡配置的商用车。
图1 5挡时算法运算结果
图2 6挡时算法运算结果
手动挡配置的商用车在5挡空载时的自称重算法结果如图3所示,实车的实际质量为7.20t,算法运行结果为6.98t,误差为3.05%。从右侧仿真图中可以得到,在400~500s区间,算法收敛到真实值附近。
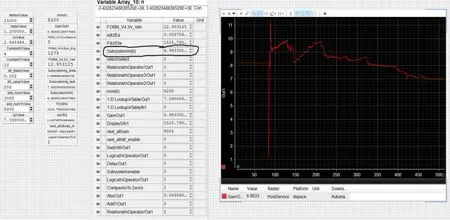
图3 手动挡5挡自称重算法运行结果
图4为手动挡配置的商用车在6挡空载时的自称重算法结果,算法运行结果为6.72,误差为6.67%。在图4右侧的仿真图可以得到,在300~350s区间,算法收敛到真实值附近。
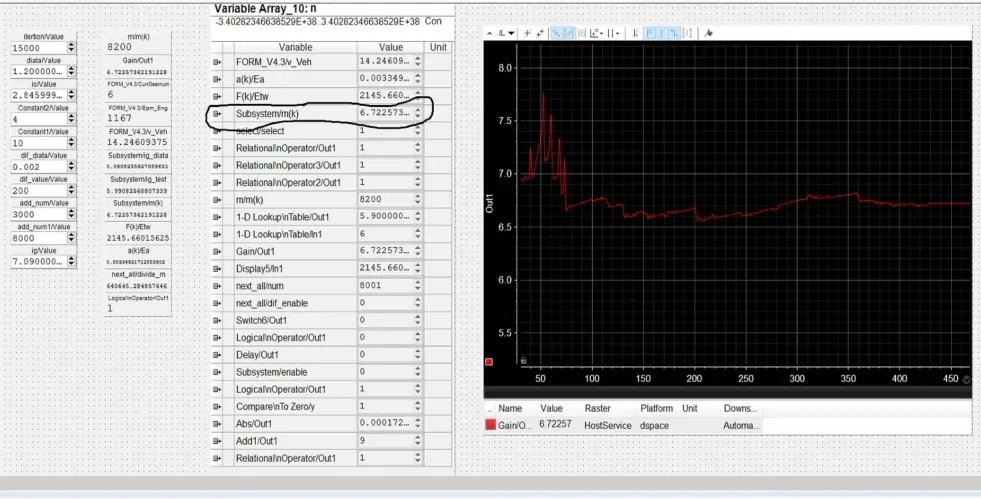
图4 手动挡6挡自称重算法运行结果
其中,左侧第一列为算法运行所设置的重要参数,设置满足算法运行的数据迭代次数大于3000并且算法运行结果m(k)增长或减少在窗值0~0.002t之间保持200步(一个步长为0.05s),或者满足算法运行的数据迭代次数大于8000时,输出自称重算法结果并保持直至车速为0或T15下电。
根据算法设定条件,换挡过程中不激活递归最小二乘法模块,此时最小二乘法输出结果回归初始值8.20t。重新激活最小二乘法后,接着之前的计算结果进行下一轮迭代。手动挡配置的商用车加载10t(车辆总重为17.20t)在6挡时,自称重算法结果如图5所示。由图5可得,算法计算结果为18.21t,与真实车重误差为5.87%。算法在120s左右开始收敛,在170s左右接近计算结果值。手动挡配置的商用车加载10t(车辆总重为17.20t)在10挡时,自称重算法结果如图6所示。由图6可得,算法计算结果为16.45t,误差为4.36%。算法在100s左右开始收敛到计算结果值附近。

图5 手动挡6挡车总重17.2t计算结果
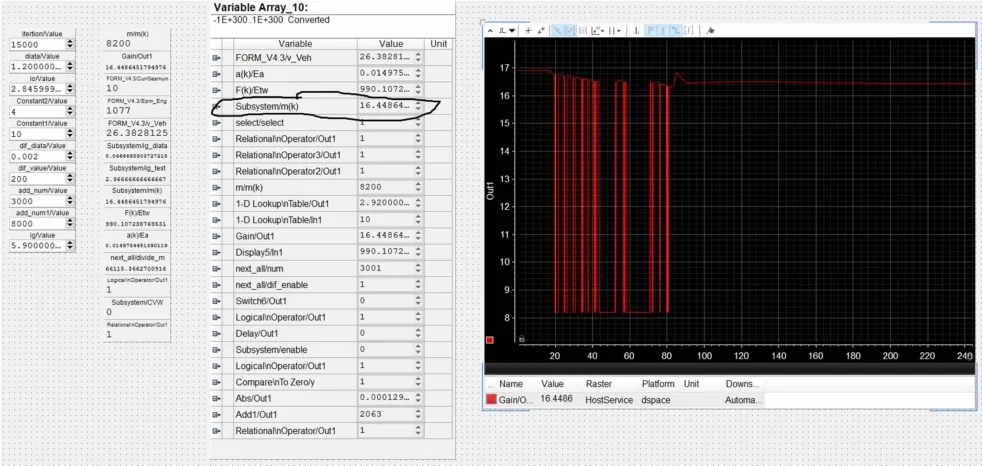
图6 手动挡10挡车总重17.2t计算结果
3 总结
本文对油耗商用车自称重算法进行研究,基于车辆纵向动力学和积分学提出了一种基于商用车的自称重算法。通过HIL台架测试和手动挡柴油车在不同的挡位下进行实验验证,验证了算法的可行性以及有效性。实验结果表明,该算法的误差能够保持在6%以内,算法的收敛时间保持在100~200s之间。在后期的研究中,可以在试验车辆上适当加入一些低成本的传感器,例如检测道路坡度的传感器,从而进一步提高算法的精度。
猜你喜欢
汽车实用技术(2022年17期)2022-09-16
汽车观察(2020年4期)2020-05-27
汽车与驾驶维修(维修版)(2019年5期)2019-09-10
汽车与安全(2019年3期)2019-06-21
汽车与安全(2019年12期)2019-05-14
小天使·三年级语数英综合(2017年6期)2017-06-07
小天使·三年级语数英综合(2017年6期)2017-06-07
中学生数理化·高三版(2017年3期)2017-04-21
TopGear汽车测试报告(2016年4期)2017-02-06
世界汽车(2015年7期)2015-07-20
