全自动智能沏茶机的设计与研究
2022-10-28 04:26左义海董叙言黄玉轩李作卿
机械工程与自动化 2022年5期
左义海,董叙言,黄玉轩,李 琰,杨 璐,李作卿
(太原工业学院 工程训练中心,山西 太原 030008)
0 引言
茶是世界上三大饮料之一[1],作为国饮,在某种程度上可以作为中国雅文化的代表[2]。冲茶、饮茶作为一种修身养性、老少皆宜的休闲方式一直深受大众的喜爱[3]。据统计,我国有近4.3亿人饮茶,日均饮茶量达6杯[4],我国人民在长期的饮茶过程中形成了一套独特的茶艺文化,茶艺内容的综合表现就是茶文化[5]。不同茶叶冲泡时所需的水温、浸泡时间各异,对不了解茶艺的人,通过一款全自动沏茶机可以在享受传统茶艺文化的同时感受到智能科技带来的便利。
早在19世纪30年代,英国的哥卜林公司将闹钟与煮水设备相结合,发明了带闹铃提示的煮茶机[6]。Rosengren LO利用连通器与定时器原理发明了带定时功能的泡茶机[7]。随着人工智能的发展,泡茶机也逐渐向智能化方向发展。2014年,BKON公司研发了真空泡茶机,利用真空萃取技术一次性冲泡出茶香。2015年,Teforia公司设计的智能泡茶机[8]可以实现茶叶种类的自动识别,并根据用户的饮茶习惯调整茶叶泡制方式。国内也相继推出了电磁式泡茶机、泡茶咖啡一体机、茶王泡茶机等智能泡茶设备。但上述设备均未将泡茶、沏茶、清洗集成为一体,缺少与茶文化、茶艺的融合。
在上述研究的基础上,本文设计了一款全自动智能沏茶机。该机可按照不同用户的喜好,根据茶叶品种,自动实现水温调节、泡茶、倒茶以及茶具清洗等,并将茶艺流程融入沏茶过程,起到传播茶文化的作用。
1 全自动智能沏茶机工作原理
全自动智能沏茶机核心控制处理器采用STM32F407ZGT6单片机[9],搭配DS18B20温度传感器[10]、GP2Y0A21YK0F红外测距传感器[11]、智能串口屏、42步进直线丝杆电机等元器件,实现沏茶的智能化。该沏茶机由出茶装置、升降装置、沏茶装置和清洗装置组成,其结构如图1所示。

图1 全自动智能沏茶机三维模型
用户将不同种类茶叶放入储茶盒,通过智能屏输入泡茶类别,水泵向热水壶注水,水壶底部热水器开始工作,通过温度传感器监测水壶内水温,达到预设水温后进行语音提示;出茶装置开始工作,机械臂带动茶漏转至储茶盒下方,电动蜗杆推动定量茶叶落入茶漏,机械臂带动漏网转至茶壶上方,水泵向茶漏网加注适量热水,并开始洗茶;洗茶完成后,平台转动至废水收集处,将洗茶水倒出并将茶漏移动到水壶上方,沏茶装置开始工作;水泵向茶壶加注热水开始泡茶,泡茶水温及时间由机器自主控制;泡茶完成后,升降装置工作,茶壶上升至指定位置,红外测距检测到茶杯,倾倒茶水,否则槽轮带动茶盘转动相应角度,直至检测到茶杯,完成倒茶任务;若茶壶中水量不足,升降装置将茶壶下降至初始位置,重复下一个泡茶流程;饮茶完毕,茶壶下降至初始位置,平台转动倾倒废茶,清洗装置开始工作,机械臂将茶漏翻转,抖出残余茶叶,超声波清理器伸入茶壶内开始清洗,清洗完成后,各装置复位。
2 各装置的设计
2.1 出茶装置的设计
出茶装置主要由蜗杆、储茶盒、拇指电机组成,其结构如图2所示。拇指电机控制螺距为18 mm的蜗杆定时旋转,实现向茶壶中定量添加茶叶的功能。
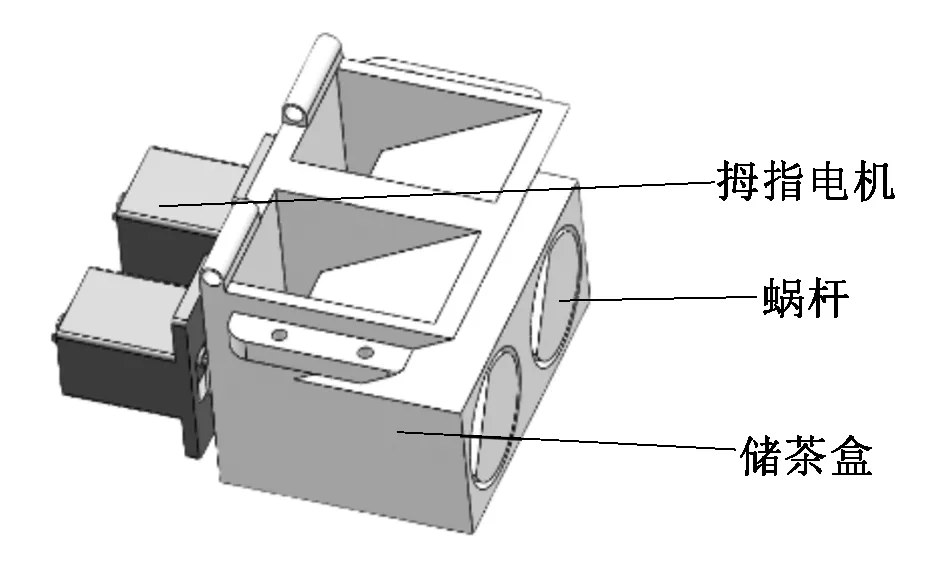
图2 出茶装置
2.2 升降装置的设计
升降装置主要由步进电机、丝杆、钢轴、箱式直线轴承和平台组成,其结构如图3所示。

图3 升降装置
通过控制步进电机[12]驱动丝杆旋转带动平台运动,控制茶壶升降到指定位置。在整个工作流程中,需要实现茶壶的升降和侧转动作,为保证茶壶平稳升降,采用两根丝杆驱动平台、两根钢轴配合直线轴承为导向的升降方式。平台通过四个相互间隔90°的卡件完成对茶壶的固定及限位。采用舵机辅以交叉滚子轴承等零件配合实现茶壶旋转动作,在整个茶壶转动中较好地完成了对茶壶的固定及旋转动作。
升降装置中两个带丝杆的步进电机需要负载3 kg的物体,为了保证平台在丝杆上平稳运动且步进电机停止时平台能稳定停留,对应步进电机的输出扭矩应该大于0.096 N·m,本文选择导程为8 mm的丝杆,采用42BYGH34-01型号的步进电机。
2.3 沏茶装置的设计
沏茶装置主要由茶壶卡件、茶壶底盘、交叉滚子轴承、双轴舵机、茶壶、茶杯组成,如图4所示,其中的茶壶固定示意图如图5所示。双轴舵机带动茶壶底盘运动,利用固定在茶壶一侧的红外测距传感器检测茶杯是否就位。当检测到茶杯时,通过控制舵机转动角度将茶水倒入茶杯中,完成一次倒茶任务。茶壶底盘启动将下一个茶杯转动到指定位置,依次实现自动出茶及传统茶艺表演。

图4 沏茶装置
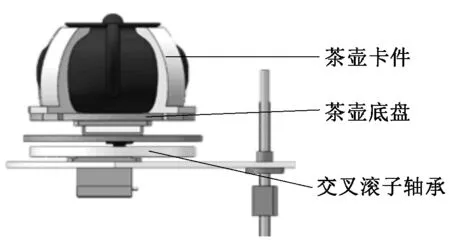
图5 茶壶固定示意图
全自动智能沏茶机茶壶质量为240 g,注水量为500 mL,倒五杯茶为一个循环,每一杯沏茶量50 mL,取水的密度为1 g/cm3,茶壶底部中心距舵机输出轴中心的距离为9 cm。
沏茶装置中双轴舵机需要举起茶壶,所需扭矩较大,为保证沏茶过程中茶壶的稳定,本文选用RDS3225双轴舵机,其额定功率和额定扭矩均可满足要求。
当双轴舵机工作时,在竖直方向上茶壶上升的加速度分量ay为:
ay=a×cosθ3.
(1)
其中:a为茶壶上升的加速度;θ3为舵机臂与桌面的夹角。
在此过程中a恒定,又因为θ3<90°,即 cosθ3随着θ3的增加而递减,所以ay随着θ3的增加而递减,近似于余弦函数。
在竖直方向上茶壶上升的速度分量vy为:
vy=ay×Δt.
(2)
其中:Δt为茶壶上升时间。
茶壶的速度应从0开始到0结束,结合加速度函数,当θ3≤45°时,茶壶做加速度逐渐减小的加速运动,直至加速到最大速度;当θ3>45°时,做加速度逐渐增大的减速运动,直至减速到0。
采用Adams软件[13]对沏茶过程进行仿真,研究茶壶自身速度、加速度、位移随时间的变化,仿真结果如图6所示。

图6 茶壶速度、加速度、位移随时间的变化曲线
倒满第一杯茶的时间为3.5 s,舵机运动角度0~35°,倒满第五杯茶的时间为5.2 s,舵机运动角度0~42°。由于五次倒茶过程相似,本文取倒第一杯茶与倒第五杯茶进行数据分析,舵机的扭矩与角度如图7、图8所示。
由图7、图8可知,舵机最大负载发生在倒第一杯茶的1.9 s处,此时舵机倾角为35°,扭矩达到最大值为7.800 7 kg·cm,小于计算所得8.1 kg·cm。而洒在茶杯外的茶水量仅为20 g,影响较小。以倒五杯茶为一个循环,当倒完第一杯茶后,任意时刻茶壶中的茶水质量都小于第一次倒茶时茶壶中茶水的质量。因此,本文所选舵机符合要求。
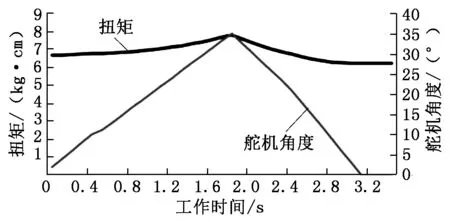
图7 倒第一杯茶数据

图8 倒第五杯茶数据
2.4 清洗装置的设计
清洗装置主要由双轴舵机、单轴舵机和超声波模块组成,其结构如图9所示。清洗装置为两个自由度的机械臂,通过机械臂翻转配以流水冲洗茶漏,完成对茶漏的清洗;茶壶注水,将超声波清洗模块伸入茶壶内部,对茶壶进行清洗。
3 结语
本文针对目前泡茶机集成化、智能化程度低,人机交互性差的问题,设计并开发了一种全自动智能沏茶机,将茶艺流程融入到沏茶过程中,可以按照不同用户的喜好,根据不同种类茶叶,实现水温自动调节、自动泡茶、自动上茶、自动清洗的全自动化功能。通过实验分析,全自动智能沏茶机可以实现设计要求。在后续研究中,还可以根据客户需求调整各个模块的功能,提高市场推广价值和应用前景。

图9 清洗装置
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
快乐作文(5.6年级)(2022年4期)2022-05-07
有色金属材料与工程(2021年4期)2021-11-27
雪豆月读·低年级(2021年4期)2021-09-10
科学大众(2021年6期)2021-07-20
小学生学习指导(低年级)(2020年11期)2020-12-14
装备维修技术(2020年4期)2020-11-23
学苑创造·B版(2020年5期)2020-07-06
动漫星空(兴趣英语)(2020年4期)2020-03-30
广东茶业(2016年4期)2016-02-27