TRIZ 理论在电动轮椅中轮部装结构优化设计中的应用
2022-10-31 04:06刘莹颖邓援超汤宇
农业装备与车辆工程 2022年1期
刘莹颖,邓援超,汤宇
(430068 武汉市 湖北省 湖北工业大学)
0 引言
随着社会主义新时代的到来,科技发展迅速,人们的生活水平也越来越好,人类的平均寿命达到75 岁,老龄化已经成为全球一突出问题[1]。另外,自然灾害和某些人为因素导致残疾人数增多。电动轮椅的出现,很大程度上改善了部分老年人和残障人士的日常生活,它是适合老年人和下半身残疾人士使用的体闲代步工具,其设计研发也成为一个重要的课题。
TRIZ 理论是综合了多学科领域的法则和原理所形成的理论体系,它主要由技术矛盾、物理矛盾、标准解及效应库等创新工具组成[2]。本文针对目前电动轮椅在运行过程中同步性差、不稳定的问题,首先利用TRIZ 理论定义和描述该问题,并对成型过程中遇到的实际问题进行因果链分析,找到根本原因后,运用TRIZ 工具对问题进行求解,得到了多个解决方案模型,最终选取最优方案模型进行验证[3],电动轮椅在运行过程中同步性差、不稳定的问题得以解决,电动轮椅中轮部装装置得以优化。
1 电动轮椅中轮部装装置介绍
电动轮椅由前轮部装、中轮部装、后轮部装、坐垫机构、靠背机构和扶手机构等组成,模型如图1 所示。轮距的伸缩主要靠中轮部装实现。
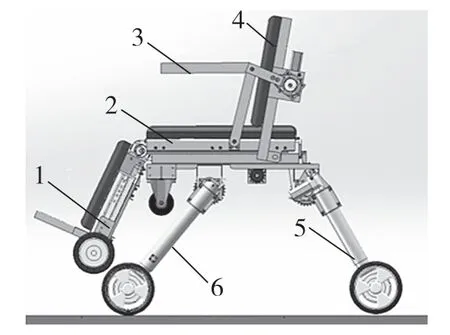
图1 电动轮椅装置模型图Fig.1 Model diagram of electric wheelchair device
本项目的轮椅在正常行驶时必须将中轮轮距变宽,来增加其稳定性。在如厕时,中轮轮距宽度需要较窄,以方便通过卫生间门;在上下楼梯时,中轮轮距宽度需要较宽,以确保轮椅上下楼梯的稳定安全。所以中轮部装的主要作用是实现轮距的伸缩,从而满足各种场景对轮距的要求,使电动轮椅安全通过,增加稳定性。其模型图如图2 所示,结构简图如图3 所示。
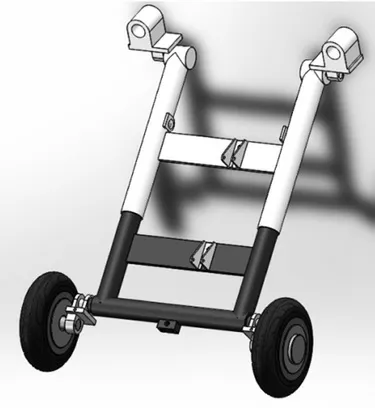
图2 中轮部装结构模型图Fig.2 Structure model of middle wheel assembly
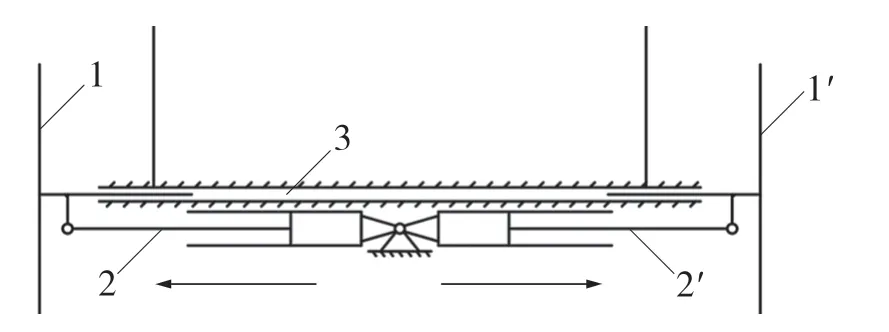
图3 中轮部装关键机构结构简图Fig.3 Structure diagram of key mechanism of middle wheel assembly
该机构为主要由两个电动推杆组成的四杆机构,工作过程:在左右电动推杆作用下,左右轮安装座得以伸缩。在左右轮安装座的带动下,实现轮距的伸缩,从而满足不同场景对轮距的要求。
轮椅中轮部装工作原理是:在左、右轮子安装座1 及1’的固定支撑下,中轮驱动轮椅前进后退;中间连接轴套3 起导向和支撑作用;轮椅的高度调节由中轮升降杆实现;中轮轮距调节由左推杆2、右推杆2’实现;推杆由中间连接轴套3 固定;控制系统控制左右推杆从而推动左右轮子安装座1,进而支撑中轮。
2 问题分析
2.1 问题描述
本项目组成员在对本项目样机进行试验时发现,电动轮椅在正常行驶和上下楼梯时,如果轮距不够宽则会造成轮椅行驶不稳定,存在安全隐患;如若在通过卫生间的门时中轮轮距不够窄,则无法通过;且原始系统在满足上述条件时采用了过多的动力源,同步性差。
2.2 系统功能组件分析
在建立组件模型之前,首先需要确定技术系统,并根据该技术系统的定义,确定该技术系统的作用对象、技术系统组件、超系统组件[4]。本技术系统的功能是实现中轮轮距的伸缩,所以中轮是技术系统的作用对象。而技术系统的组件为中轮调节系统,分别为中轮升降杆4、中间连接轴套3、左右连接轴5 及5’、左右轮子安装座1及1’、左右推杆2 及2’。技术系统的超系统为控制系统、中轮支撑杆6、座椅机架。由以上确定的组件,对各组件之间进行作用分析,得到模型示意图如图4 所示,组件模型图如图5 所示。
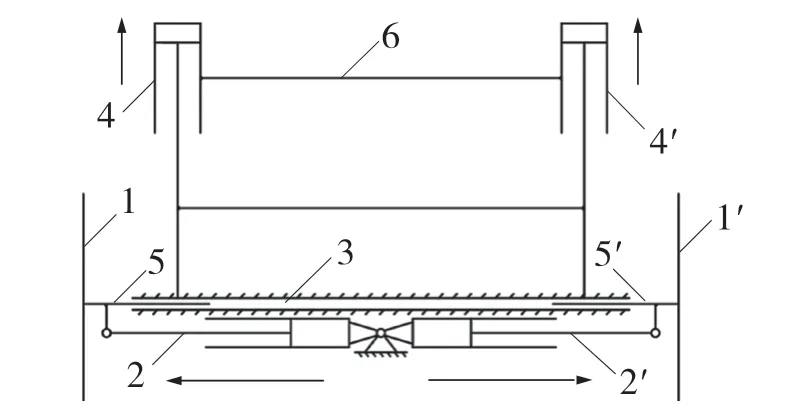
图4 中轮部装模型示意图Fig.4 Schematic diagram of middle wheel assembly model
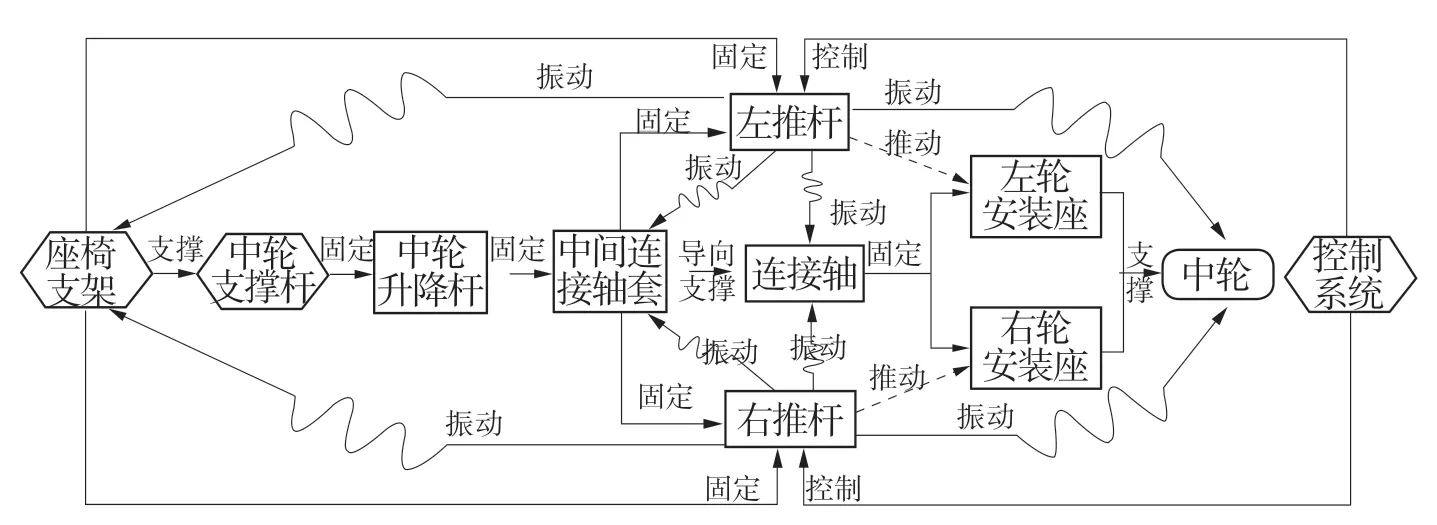
图5 功能组件模型Fig.5 Functional component model
2.3 因果链分析
因果链分析是全面识别工程系统的分析工具,可以在功能组件分析的基础上挖掘出造成该问题的深层原因,建立初始问题和底层问题的逻辑关系,便于寻找更多解决问题的突破口[5]。针对本课题的问题进行因果链分析,如图6 所示。
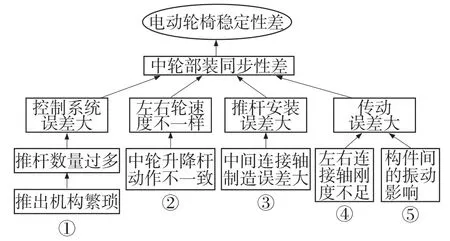
图6 因果链分析Fig.6 Causal chain analysis
由因果链分析得到影响电动轮椅稳定性差的5 个根本原因,分别用图5 中的5 个数字标出。在试验过程中发现,由于根原因①,即推出机构繁琐,导致中轮部装的同步性较差,所以需要对其进行优化设计,减少对轮椅稳定性的影响。针对根原因②,一般日常生活轮椅所需要升降的场合,中轮升降杆能较好实现且相对稳定,极少数恶劣环境,电动推杆动作不一致,导致左右轮速不一样,无法达到稳定性要求。针对根原因③,观察中轮部装实现轮距伸缩时,由于中间连接轴的制造误差,使左右推杆安装误差大,对轮椅稳定性有一定影响。针对根原因④,轮椅能较好地实现轮距的伸缩,一些恶劣条件下,左右连接轴刚度不足使其达不到稳定性要求,存在一定的安全隐患。针对根原因⑤,构件间振动大,在实现轮距伸缩时的传动误差也较大,从而导致中轮部装稳定性较差,整个电动轮椅的安全稳定性较差,仍有改善空间。所以根原因①是电动轮椅稳定性差的关键原因,根原因⑤也可以进行优化改进。
3 TRIZ 工具对问题求解
3.1 问题1:中轮部装同步性差
3.1.1 物理矛盾解决问题
物理矛盾是指对系统的同一个参数有不同的要求。运用物理矛盾解决问题的主要步骤是:第1 步,首先利用TRIZ 理论相关工具分析出待解决问题的根本原因,然后定义物理矛盾[6],当对系统中同一参数提出互为相反的要求时,就说存在物理矛盾;第2 步,描述矛盾的参数或者相反的要求;最后一步,找到相应的分离原理,初步试着解决问题,即利用各分离原理推荐的发明原理来构建解决方案模型,最终转换为实际方案[3]。针对本文电动轮椅推出机构不合理这一问题,解决流程如下:
针对根原因①中轮部装的推出机构繁琐,从而导致同步性差这一问题,发现轮距的伸缩是依靠两个电动推杆的作用,但是电动推杆的数量多就会造成中轮部装的结构繁琐,很难达到稳定性的要求,存在安全隐患,所以电动推杆的数量需要少,这样可以较好地保证其同步性,使电动轮椅行驶更加平稳,同时也可以降低成本。但是如果只有一个推杆作用,无法保证其推力可以实现两个轮子在杆的作用下伸缩,这就又需要电动推杆的数量多。这样就形成了一对物理矛盾,即电动推杆的数量需要少,因为可以使杆件之间的运动同步性提升,使轮距伸缩更加平稳;但是又需要电动推杆数量多,因为在不增加成本的前提下,无法保证一个推杆的推力可以达到预期要求。
针对该物理矛盾适用“基于条件分离”来解决。基于条件的分离是将矛盾双方在不同条件下分离开来,以获得问题的解决。针对电动轮椅中轮部装同步性差这一问题,可以在一个电动推杆的条件下,重新设计一组杆件,使一个推杆的推力能达到预期要求,从而实现轮距的收缩。选择“条件分离”所推荐的发明原理6 多样性原理得到方案1,即在原始方案上去掉一个推杆,只用一个推杆水平推动杆6,从而依次带动杆5、4、3、2,从而实现轮距是伸缩。带电动推杆式八杆机构示意图如图7 所示。
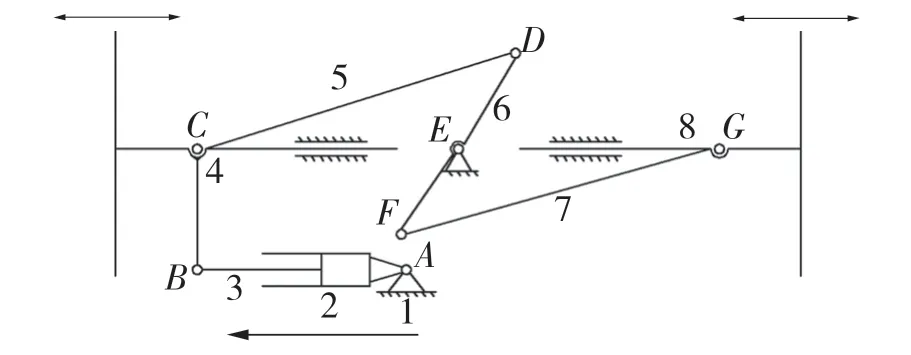
图7 带电动推杆式八杆机构示意图Fig.7 Schematic diagram of eight-bar mechanism with electric push rod
3.1.2 技术矛盾解决问题
矛盾矩阵是用39 个通用工程特性参数组成的39×39 正方矩阵。利用技术矛盾解决问题的主要步骤是:首先分析问题,找出存在的技术矛盾。然后针对具体问题确认一对或者多对技术矛盾,并将矛盾的双方转换成TRIZ 理论中提供的39 个通用工程特性参数,最后按照矛盾通用的工程参数编号i和j,在矛盾矩阵中找到对应的发明原理,再将已找到的发明原理结合对应的专业知识,得到初步解决方案。针对本课题,具体步骤如下。
针对中轮部同步性差这一问题,若要让中轮部装同步性增强,首先想到的就是减少电动推杆的数量。让一个电动推杆作用,实现轮距的伸缩,避免了中轮部装杆件运动的不协调,进而提高了电动轮椅行驶的稳定性,减少事故发生。但减少电动推杆的数量必然会单个推杆所承受的力增大。因此可以将推杆的数量和其所承受的力作为一对技术矛盾。得到技术矛盾后,抽象对应到39个通用工程参数,得到待改善的参数是No.26-物质或事物的数量,恶化的参数是No.10-力[7]。根据所定义的工程参数查询矛盾矩阵,发现有3个创新原理可以参考,如表1 所示。
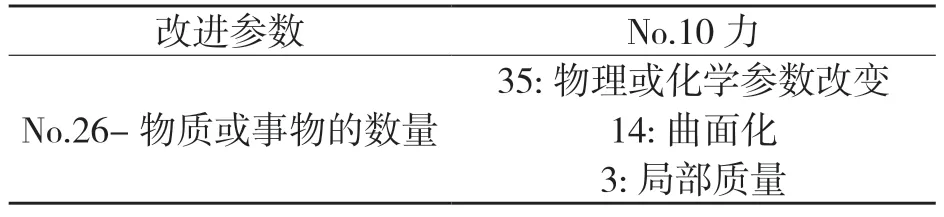
表1 矛盾矩阵表Tab.1 Contradiction matrix
根据这对技术矛盾得到的发明原理[8]35-物理或化学参数改变。通过该原理受到的启示是除了改变电动推杆的数量,还可以改变杆件数量,得到方案2,即由三杆机构及槽型凸轮组合实现轮距伸缩。这种组合机构的特点之一是相对杆始终保持平行,且二连杆的角位移、角速度和角加速度也始终相等,增加了中轮部装的同步性,从而提高电动轮椅的稳定性,槽型凸轮的不同行程也能实现各种场合下对轮距的要求。三杆槽型凸轮机构方案示意图如图8 所示。
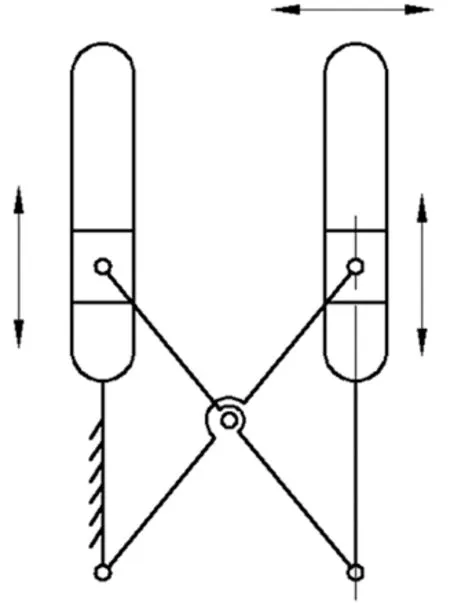
图8 三杆槽型凸轮机构示意图Fig.8 Schematic diagram of three-rod groove cam mechanism
根据这对技术矛盾得到的发明原理14-曲面化原理的描述,将直线、平面用曲线、曲面化代替。由此发明原理得到方案3,即通过利用圆柱凸轮结构,将旋转运动转化成直线运动,从而实现两轮距离的伸缩。圆柱凸轮是一个在圆柱面上开有曲线凹槽或在圆柱端面上作出曲线轮廓的构件,它可以看做是将移动凸轮卷成圆柱体演化而成的。圆柱凸轮式推杆机构示意图如图9 所示。
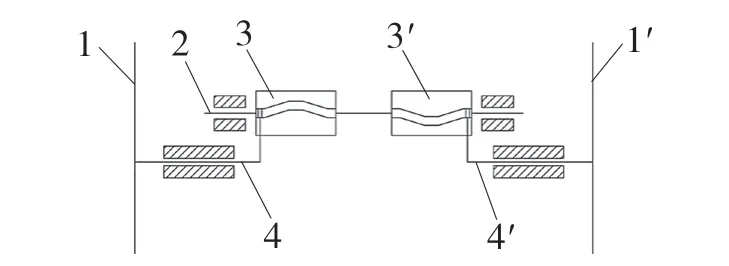
图9 圆柱凸轮式推杆机构示意图Fig.9 Schematic diagram of cylindrical cam push rod mechanism
3.2 问题2:中轮部装稳定性差
3.2.1 物场模型及标准解解决问题
由于电动轮椅中轮部装繁杂的构件间存在较大的振动,导致传动误差大,从而使电动轮椅整体的平稳性差。针对这一问题,对当前系统进行物场分析[9]。物场分析方法建立在现有产品的功能分析基础上,通过建立现有产品的功能模型的过程,可以发现有害作用、不足左右及过剩作用等小问题[5]。利用这一方法首先得定义具体问题,所有的功能一般都可以分解成为3 个元素,即2个物质和1 个场。复杂系统则可分为多个物质和多个场。然后构建模型阐述它们之间的关系,为解决问题创造条件。针对本论文,具体流程如下:
(1)确定物质:S1-左右轮安装座,S2-左右电动推杆,S3-中间连接轴套。
(2)确定场:F1-机械场1,F1-机械场2。
图10 所示机构是由两个电动推杆组成的四杆机构。其中左右电动推杆分别与左右轮安装座构成机械场F1;中间连接轴套分别与左右轮安装座构成机械场F(1由于左右对称,故考虑一半即可)。
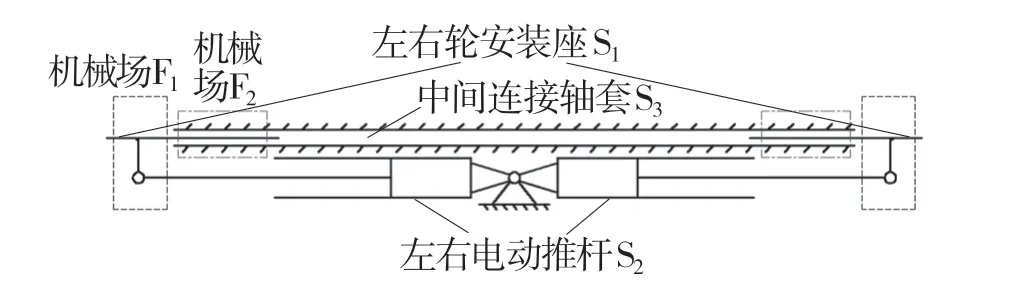
图10 分析示意图Fig.10 Analysis diagram
(3)将图10 所示的系统分解,建立多个物质—场物场模型如图11(a)所示[10]。
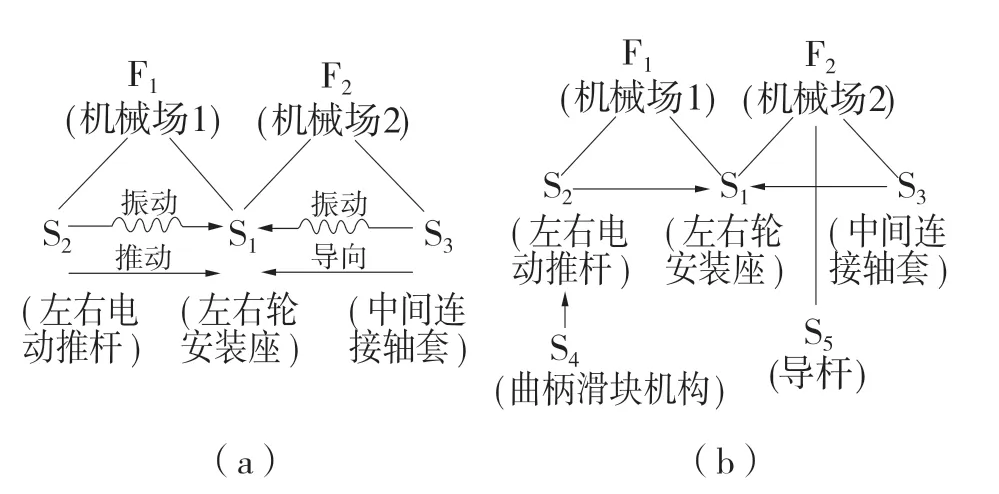
图11 解决方案物场模型图Fig.11 Solution object field model diagram
针对有害效应的完整物场模型,可通过76个标准解中第一类标准解,即No.10-在一个系统中有用及有害作用同时存在,通过改变S1或S2来消除害作用[6]。将这个思路具体到本课题发现,通过改变S2可得解决方案4(如图12 所示),即在原始方案上去掉中轮部装的一个电动推杆,使机构串联一个曲柄滑块机构S4来实现一个推杆控制两个轮子安装座,使其更加平稳地推出,从而实现轮距的伸缩,更好地达到同步性要求。
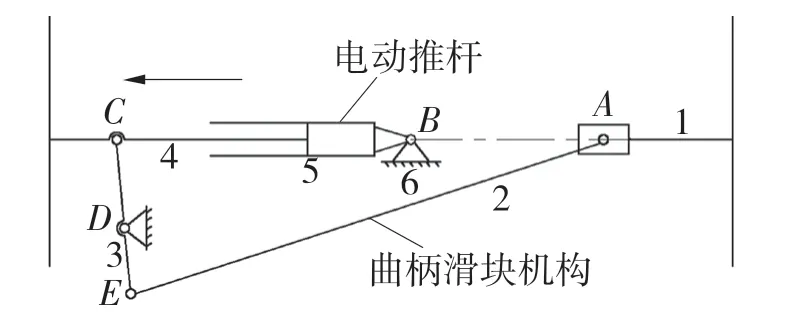
图12 带电动推杆式曲柄滑块机构Fig.12 Crank slider mechanism with electric push rod
4 方案评估与选择
综上讨论分析,可总结出表2 所示方案,最后根据方案的经济性和可用性进行评估和选择。其中经济性包括方案的复杂性程度和对原设备的改动程度,这两点直接决定材料费用以及人工成本;而有效性包括方案解决的实用性及稳定性[3]。
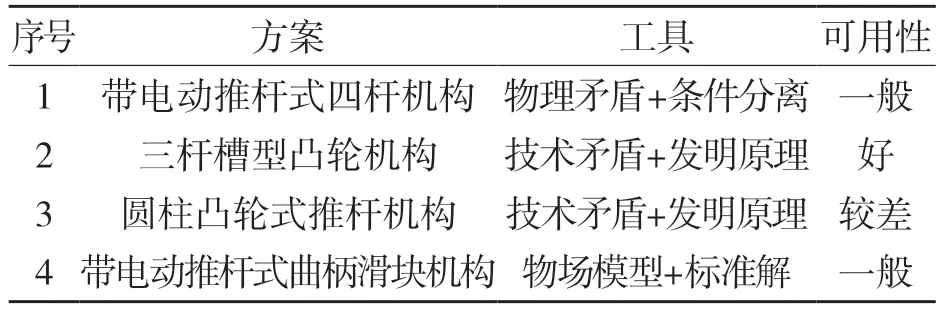
表2 方案汇总表Tab.2 Summary of schemes
方案1 为带电动推杆式四杆机构,只需1 个推杆就能有效地实现轮距伸缩,平稳性较原始方案好,传动角也相对小,可以有效传递力;方案2 为三杆槽轮机构,结构较为简单,经济成本低,也必将容易调试,能够很好地完成预想要求,具有良好的稳定性;方案3 为圆柱推杆式机构,也能很好实现轮距伸缩,但圆柱凸轮上的凹槽升程需要按伸缩要求设计,方案较为复杂,较难实现,但平稳性高;方案4 为带电动推杆式曲柄滑块机构,设备简单,经济成本一般,也能较好实现项目要求,平稳性一般。
经过上述分析与评估,最终选择对方案2 进行实施,电动轮椅中轮部装在实现轮距伸缩时的平稳性差的问题被解决,使电动轮椅安全性显著提高,电动轮椅中轮部装装置得以优化。
5 结语
对电动轮椅行驶过程中轮部装伸缩同步性差、不稳定这一问题,进行了问题描述和定义。利用功能模型及因果链分析,找到造成中轮椅行驶不稳定的根本问题是中轮部装结构复杂、传动角大。利用物场模型、技术矛盾、物理矛盾等工具将这些根本问题转化为TRIZ 问题模型,再通过标准解、发明原理和分离原理等工具对问题模型进行分析解决。通过技术矛盾推荐的35-物理或化学参数改变原理,从而想到增减杆数和电动推杆数来实现轮距的伸缩。最后,结合经济性和有效性对这些方案模型进行可用性评估和选择,即采用三杆槽型凸轮机构,有效解决了电动轮椅中轮部装伸缩时的不平稳性。这是运用TRIZ 理论解决工程问题的成功案例,同时也为后续智能轮椅结构创新设计提供了新的设计研究思路。
猜你喜欢
车迷(2022年3期)2022-08-01
世界汽车(2022年3期)2022-05-23
汽车电器(2022年2期)2022-03-01
小天使·一年级语数英综合(2019年4期)2019-10-06
金山(2018年9期)2018-11-21
天津诗人(2017年2期)2017-11-29
科技知识动漫(2017年7期)2017-08-09
科技创新导报(2016年4期)2016-11-19
演艺科技(2016年9期)2016-05-14
爆笑show(2015年5期)2015-07-09