基于多源数据融合精细提取三维结构纹理
2022-10-31 12:01卢涛
地理空间信息 2022年10期
卢 涛
(1.正元地理信息集团股份有限公司,北京 101300)
目前空间对地观测技术已广泛应用于测绘、建筑设计、道路桥梁等多个领域,主要有机载LiDAR点云扫描与倾斜摄影测量技术,虽然该技术发展至今已大大提高了测绘工作的生产效率,但每种测量手段各有其优缺点,特别是精细化三维建模尤为突出。机载LiDAR扫描数据点位坐标精度高,且具有多次回波反射强度信息,但它没有光谱信息,地表特征识别不明显,无法对地表进行专业解译与判读。而基于倾斜摄影技术生成的三维实景模型,虽具有光谱信息,地表及目标物纹理特征丰富,但其影像数据空间分辨率与精度不高,尤其是高程坐标精度,远不如机载LiDAR点云数据[1-2]。因此,目前以单一数据源很难满足各行业对精细三维模型的构建要求。本文基于机载LiDAR点云数据、倾斜摄影测量与正摄影像数据,借助多源数据融合技术,着重探讨了航测目标物精细化三维建模技术,以及其结构纹理提取的方法,并对融合前后的三维模型,进行了精度评定与对比,取得了较好的测试结果。
1 融合技术流程
机载LiDAR点云与倾斜摄影数据融合主要包括两部分内容,第一部分是对数据的要求,包括采集、地面控制测量、航测、提取具有绝对坐标的空中三角测量数据,LiDAR还包含点云数据的拼接,如图1所示。在具备了含绝对坐标系下的倾斜摄影空间加密成果与LiDAR点云数据后,即可进行第二部分操作,Li-DAR点云与其自带正摄数据的融合,其次为该融合数据对倾斜影像空三数据的融合。
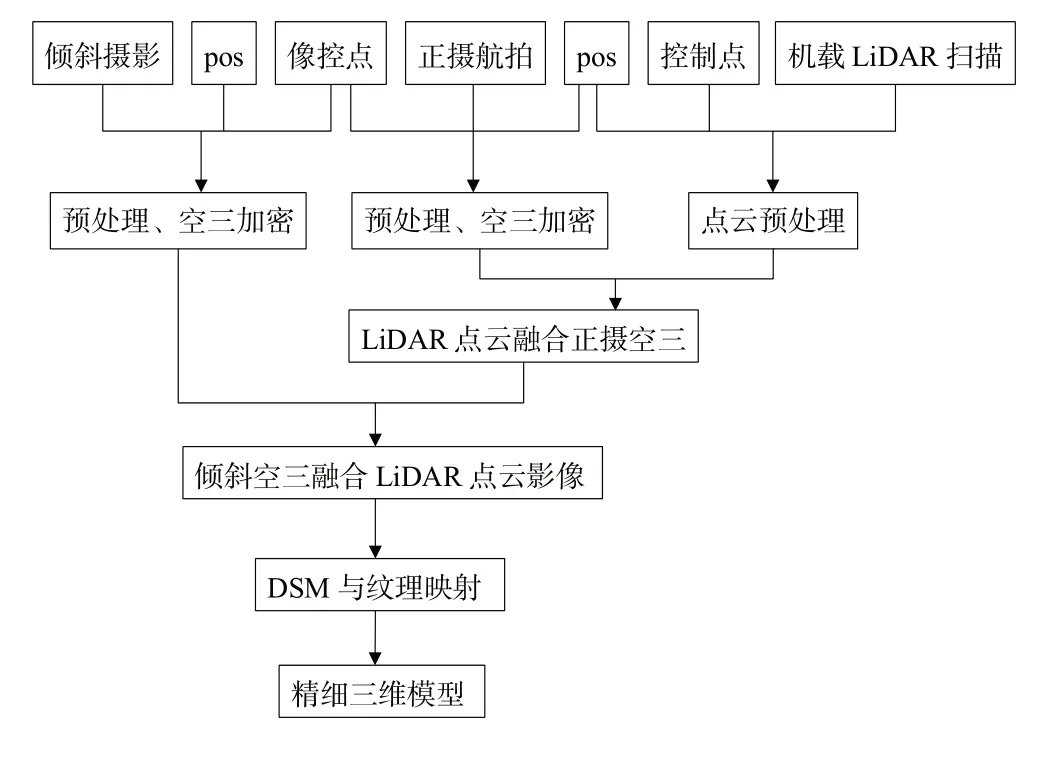
图1 多源数据融合技术构建三维模型流程图
2 数据采集与预处理
2.1 数据采集要求
若要使倾斜影像与机载LiDAR点云完好的融合,首先需要两者在同一绝对坐标系下,因此,航测地表控制点最好使用同一套坐标系;其次,制作高分辨率、高精度的三维模型,要求LiDAR点云在每平方米内的数量要足够多,足以提升航测地表分辨率。依据多次测试经验,要求高精度时每平方米点数在80~120个为最佳,数据量太大则会给后期数据处理带来过度的计算资源消耗,意义并不明显,所以根据地形、地物需要考虑航高与飞行效率的问题;再次,LiDAR点云数据除具有三维坐标外,同时还应具有强度与时间标记等信息,以供数据处理应用。
2.2 数据预处理
数据预处理是整个数据融合的基础,除去倾斜摄影空三环节剔除分层数据,其余工作主要还是在机载LiDAR点云的处理环节。
首先是点云数据的配准,由于棱镜尺度和激光扫描仪与惯性测量装置(IMU)间的角度误差,机载激光扫描仪会产生不同扫描带之间同名地物点的位置不一致,这些角度误差以航偏角、横滚角、俯仰角的角度修正值表示,这些值对每个激光扫描系统来说是已知的。因此,有效的求取这些参数,可精确配准点云数据[3-7]。该过程包含了求解GPS轨迹文件、利用校准后的角度参数解算点云三维坐标,具体方法有面到面配准与基于连接线的配准。这里主要给出面到面配准方法(找出航偏角、横滚角、俯仰角和镜面尺度的修正值,每条航线的高程加旋转角改正值,以及高程的波动值,若修正值较大,则进行修正)。通过本步骤的修正预处理,我们即可获取最终配准后的点云数据。
其次是点云的裁切与去噪声处理。裁切是依据质量裁切,从有更好激光数据的航线位置中剔除低质量的点云,如剔除轨迹信息弱的点。此外,将LiDAR点云展布于数据处理程序,剔除噪点,剔除噪声后的LiDAR点云数据才是具有绝对坐标系、GPS轨迹、强度信息的,能用于后期多源数据融合的高质量点云数据。
3 多源数据融合处理
3.1 LiDAR点云融合正摄影像
在机载LiDAR点云扫描过程中,无人机同时搭载正摄相机航拍,该过程获取的LiDAR点云与正摄影像可在后期提取地表与建筑物顶面精细结构纹理信息。由于LiDAR数据是一个个点状离散数据,所以此融合过程不存在一个LiDAR数据点对应多个像素的情况。同时,鉴于当前LiDAR技术的发展,点云密度相对于像素密度来说要小得多,也不存在一个像素内有多个LiDAR数据点的情况,因此,该融合环节不存在重叠与内插的问题。本质上讲,它属于加权融合法,即对正摄影像进行线性复合,从振幅上对图像的结果进行突出处理,从而达到图像的增强效果[8]。如对A、B两幅源影像的像素灰度值进行加权平均融合的过程可表示为:

式中,i,j分别是图像中像素的行号与列号;k1,k2为图像A,B的加权系数(通常k1+k2=1)。
3.2 LiDAR点云影像融合倾斜空三数据
在该部分融合中,核心内容是如何将两者完好的配准融合,我们通过2种方案加以探讨,方案一,通过机载LiDAR已有GPS轨迹文件,与倾斜影像空三点云在相同绝对坐标系下进行直接融合,前提是2种数据在融合前需要具有相同的绝对坐标系,后期在融合过程中只需匹配x、y、h即可;方案二,机载LiDAR点云影像与倾斜摄影空三成果坐标不一致,或倾斜数据在航测前并无布设地面控制点,此时需人工手动添加控制点,使二者通过手动控制点完好融合。由于参与了人工配准,所以在机载LiDAR数据的导入时即无需要求GPS轨迹文件。在手动介入布设控制点时,点位的选择应均匀分布,要选在地表特征明显处,若地形起伏大、含有建筑物时,则需要在不同高程面布设控制点,以使2种数据在平面与高程2个方向进行精准融合。
4 案例分析
基于上述多源数据融合构建精细三维模型技术,我们选取了一块测区作为实验区,通过机载LiDAR点云扫描与倾斜摄影测量,获取了LiDAR点云数据、正摄影像与倾斜影像等多种数据,并借助Terrasan与Context Capture平台,实现了多源数据的融合,精细化构建了三维实景模型。如图2a、b所示,它是经过预处理后的机载LiDAR点云数据,且以高程与强度混合模式显示,其航测扫描高度30 m,以确保单位面积内有足够的密度点,这也是区别一般机载LiDAR点云数据制作DEM或DLG要求的地方。图2c、d给出了机载LiDAR点云与其正摄影像融合后的LiDAR点云影像数据,对比原始点云,正摄影像已依据绝对坐标系,将每个点云位置上的像素通过加权平均算法赋予该点,形成LiDAR点云影像,并具有光谱信息。
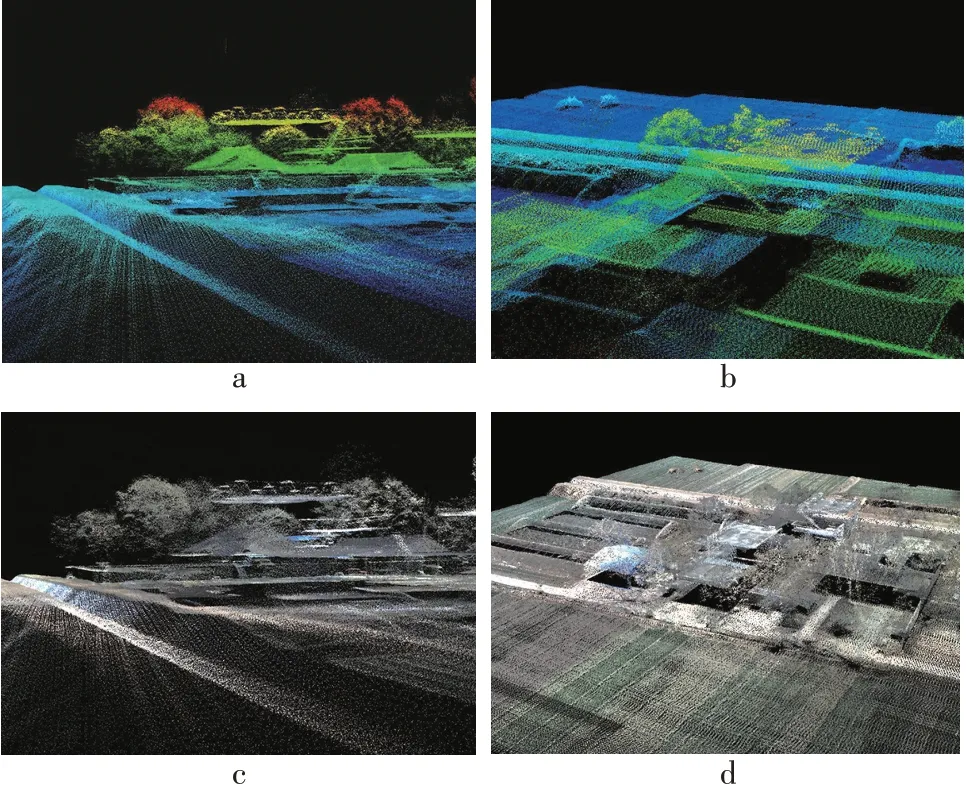
图2 原始LiDAR点云及LiDAR点云影像
图3给出了LiDAR点云影像与倾斜摄影空三数据的融合,利用前期布设较少控制点、后期人工添加控制点的结合方案。如图3a展示了导入LiDAR点云影像后的状态,并在该阶段手动添加4个控制点,地表3个,屋顶1个,由于该测区是GPS接收机检校场,屋顶有9个矩阵分布的检校墩,因此,在屋顶选取控制点在垂直方向上更具有精准匹配的意义。图3b导入了倾斜摄影空三成果,此时,应依据上述4个控制点对倾斜影像刺点;图3c则将LiDAR点云影像与倾斜空三数据置于同一场景,此时并未运用控制点进行配准处理;而图3d则给出了2种数据经多次空三重复计算、融合后的空三数据。
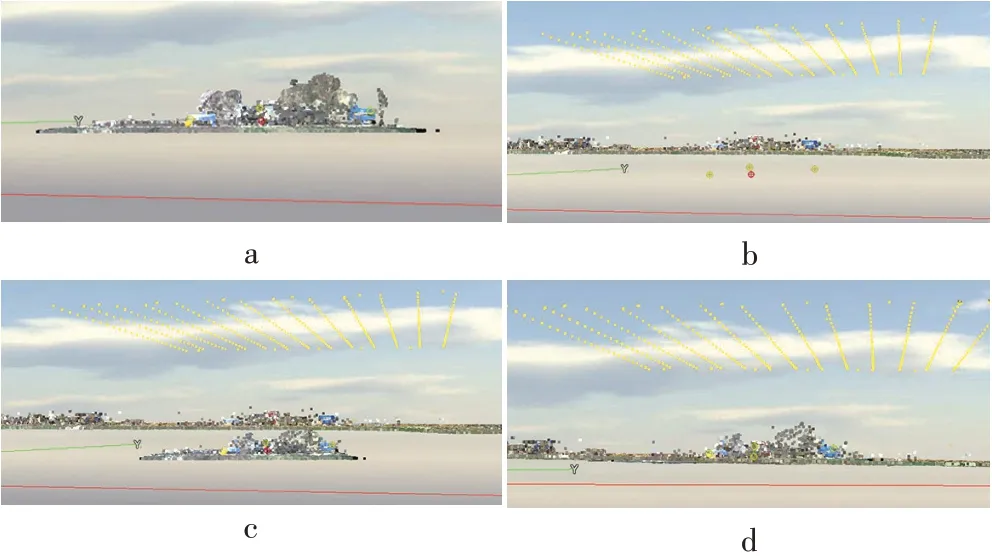
图3 LiDAR点云影像与倾斜摄影空三数据的融合
融合后的空三数据即可进行三维模型构建,如图4所示,a为利用倾斜摄影测量构建的三维模型,b为多源数据融合后的模型,从建筑顶面三维结构的完整性与纹理的倾斜度上,不难发现融合后的模型更加精细化。

图4 多源数据融合前后三维模型效果对比
为了获取融合后的模型精度,我们不仅从图中定性对比了融合前、后模型的结构纹理信息,还定量地对比、分析了2个模型的精度。前期在航飞中布设了18个地物检查点。通过外场实测地物检查点与三维模型中对应点位进行一阶差分、中误差计算,最终获取地物检查点的中误差,见表1。

表1 地物检查点平面和高程误差统计表/cm
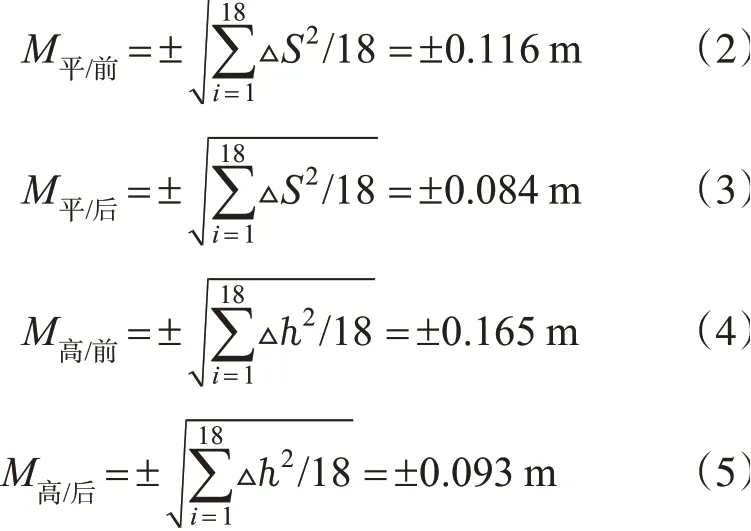
在精度量化检验的过程中,我们依据下式计算了18个地物点的平面中误差与高程中误差(见表2)。按1∶500大比例尺测图精度要求,平面点位中误差应小于规范要求的图上0.6 mm(平坦地区),高程中误差需小于0.333 m(1/3等高距)。结果显示融合前平面中误差±0.116 m、高程中误差±0.165 m,融合后平面中误差±0.084 m,高程中误差±0.093 m,尽管计算结果均满足规范要求,但无论平面中误差或高程中误差,经多源数据融合后的模型精度明显高于融合前,且机载LiDAR点云在高程精度上提升的更为显著。
5 结语
本文着重探讨了利用机载LiDAR点云、正摄影像及倾斜摄影等多源数据融合构建精细化三维模型的技术方法,结合实例给予了详细阐述,并从定性与定量两方面分析了融合后三维模型的实测精度,取得了较好的测试结果。本次测试尚未融合地基激光扫描数据,它对建筑侧面结构信息的提取效果则更为显著,因此,应在后续或根据实际生产目的,增添地基激光扫描数据,以获取更加精细化的三维模型。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年1期)2022-06-01
全球定位系统(2022年1期)2022-04-14
科技信息·学术版(2022年3期)2022-02-21
一重技术(2021年5期)2022-01-18
资源信息与工程(2021年5期)2022-01-15
全球定位系统(2021年1期)2021-03-26
思维与智慧·下半月(2021年3期)2021-03-25
当代陕西(2020年23期)2021-01-07
消费导刊(2017年8期)2018-01-18