串联TM50测量机器人在隧道变形监测中的应用
2022-10-31 12:04顾炜澄
地理空间信息 2022年10期
顾炜澄
(1.北京城建勘测设计研究院有限责任公司,北京 100101)
近年来地铁隧道变形监测一直备受关注,对地铁运营隧道进行实时的变形监测是一项必要的工作,传统测量不能准确实时快速反映出隧道变形状况,单台机器人自动化监测受监测范围影响。本文基于2台TM50测量机器人进行串联,建立自动化监测系统,对大基坑开挖影响毗邻运营地铁隧道的结构变形情况进行实时监测,以人工复核结果对自动化监测数据进行精度评估,为同类型项目提供参考依据[1-12]。
1 测量机器人监测点位布设及作业流程
1.1 测量机器人监测点位布设
为了能够对影响区间隧道进行高精度实时监测,2台串联TM50测量机器人在布设时应尽可能假设在影响隧道区域中心的位置,为了保证监测精度,测量机器人在布设时应考虑测站与基准点间的位置关系。基准点一定要布设在不易产生结构变形的位置。监测点小棱镜布设在盾构管壁两腰及道床两侧,每个断面共布设4个棱镜,与测量机器人在同侧管壁的棱镜布设时,棱镜和仪器总体应呈“V”型或“∧”型分布,并根据隧道现场位置情况错开棱镜,避免小视场角情况的发生。同时,测量仪器与棱镜必须满足限界的要求,以保证行车安全。监测点位示意图如图1所示。

图1 监测点位示意图
1.2 自动化监测作业流程
本项目自动化监测系统包括2台TM50测量机器人,棱镜组(包括基准点棱镜8个、监测点棱镜200个、双面棱镜2个等)、CPRS通信模块、计算机及徕卡GeoMoS软件、供电设备等。目前,徕卡TM50型测量机器人可以实现ATR自动照准精度达0.5 s,手自动均达到0.5 s的超高精度仪器,GeoMoS软件是由徕卡测量系统研发的自动化监测软件平台,可为实现实时监测提供处理手段。考虑到开挖项目对区间隧道的影响,只需监测隧道相对变形状况。因此,自动化监测系统采用独立坐标系,整个控制网的网型须科学,结构要合理。
2台串联测量机器人自动化监测的原理是基于全站仪支导线的方式进行坐标传递,2台串联机器人自动化监测时可以单台机器人测量范围的劣势,如无限制增加串联台数,根据误差传播定律测量精度会随之降低,根据工程需要确定最佳串联台数即可。本项目自动化监测系统工作时,测量机器人1号首先对基准点其中1个基准点进行定向测量,作为已知点,再测量其余基准点(3个)、监测点棱镜1组(100个)、双面棱镜(2个)进行测量,得到目标三维坐标信息,测量机器人2号对基准点棱镜2组(4个)、监测点棱镜2组(100个)、双面棱镜(2个)进行测量,1号和2号测量机器人通过共同测到双面棱镜三维坐标信息进行坐标传递,得到监测点棱镜2组三维坐标信息。测量数据通过CPRS信模块传回至数据库,GmoMoS自动平差助手对数据进行平差处理得到测站及监测点位最新坐标信息,从而达到对隧道实时监测的目的。
2 自动化监测数据处理
沉降数据处理。通过测量机器人自动化监测,得到各管片上监测棱镜的高程值,再利用高程值计算各个监测点点沉降量。各个监测点的沉降量为:

式中,ΔHi为沉降值;Hi为第i次测量的高程;Hi-1为第i-1次的高程。
2)水平位移数据处理。通过自动化或人工监测得到各监测点的平面坐标,根据平面坐标变化得到隧道横向、纵向位移。各监测点的本次横向位移量为:

各监测点的最近纵向位移量为:

式(2)、(3)中,ΔXa为a点最近两次监测期的横向位移量;ΔYa为a点最近两次监测期的纵向位移量;Xai为a点第i次监测得到的X坐标;Xai-1为a点第i次前一次监测得到的X坐标;Yai-1为a点第i次前一次监测得到的Y坐标;Yai0为a点第1次监测得到的Y坐标。
3)管片收敛数据处理通过监测各监测点的三维坐标数据反算测点间水平、竖向距离Si,并与上次的值Si-1进行比较,其差值就是本期水平向、竖向收敛量,计算公式为:

式(4)、(5)中,xa、ya、ha为监测点a的三维坐标信息;D为本次隧道收敛量;Si-1为上次测量隧道内径值;Si为本次测量隧道内径值。
3 精度评估
本次基坑开挖影响地铁隧道范围约300 m,每6 m布设一个监测断面,共计对50个断面进行监测,本文将自动化监测结果与人工复核结果进行对比分析,验证测量机器人自动化监测的精度。
3.1 沉降对比分析
以某临近建筑基坑施工周期内,采用串联TM50测量机器人对运营隧道进行实时监测,基于人工二等水准测量数据验证串联测量机器人在沉降方向上的精度,将数据进行统计对比分析结果如图2,串联测量机器人自动化测量沉降累计变化量与人工测量沉降累计变化量偏差如图3所示。
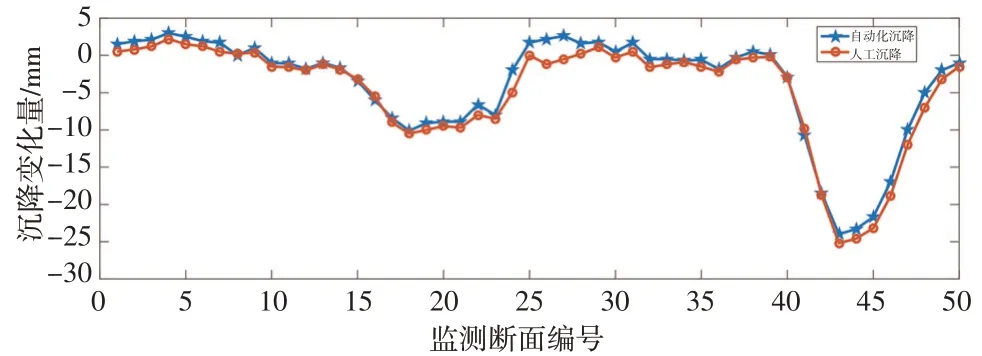
图2 人工复核与串联机器人监测沉降累计对比分析
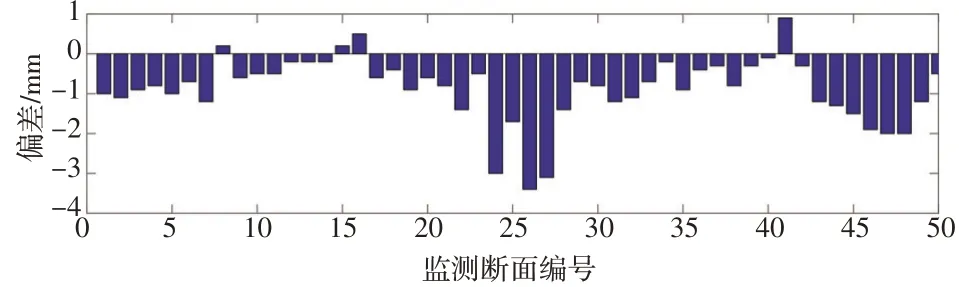
图3 人工复核与串联机器人监测沉降互差分析
由图2可知,基坑在开挖过程中对毗邻运营地铁隧道结构产生了显著沉降变化,串联测量机器人监测数据显示在监测断面编号43处产生最大沉降量为-24.0 mm,人工监测数据显示在监测断面编号43沉降量为-25.2 mm,监测断面编号43自动化监测与人工复核的偏差为-1.2 mm,总体而言,串联测量机器人自动化监测与人工复核监测具有较好的一致性。由图3可知,人工复核与串联机器人监测沉降互差在4 mm以内,在监测断面26处最大互差为-3.4 mm,50个监测断面沉降平均互差为-0.9 mm,通过人工复核进一步验证了串联测量机器人对隧道沉降监测数据的正确性与稳定性。
3.2 收敛对比分析
基于人工测距仪测量隧道管片变形量验证串联测量机器人在管片收敛方向上的精度,将数据进行统计对比分析结果如图4所示,自动化测量管片收敛累计变化量与人工测量管片收敛累计变化量偏差如图5所示。

图4 人工复核与串联机器人监测收敛累计对比分析
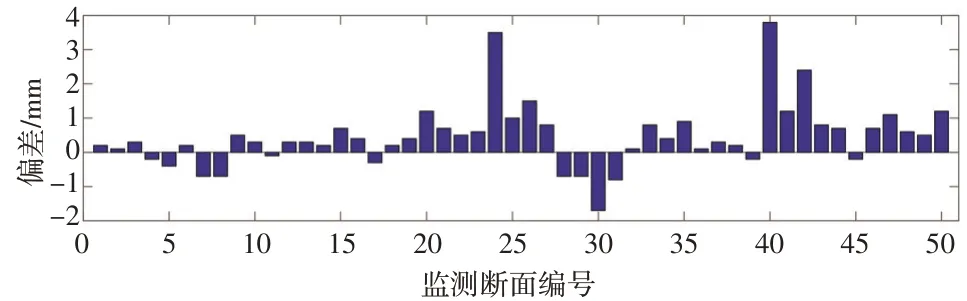
图5 人工复核与串联机器人监测收敛互差分析
由图4可知,基坑在开挖过程中对毗邻运营地铁隧道管片产生了变形影响,串联测量机器人监测数据显示在监测断面编号48处产生最大变形量为6.5 mm;人工测距仪监测数据显示在监测断面编号48管片收敛为7.6 mm;监测断面编号43自动化监测与人工复核的偏差为1.1 mm。总体而言,串联测量机器人自动化监测管片收敛与人工测距仪复核监测具有较好的一致性。由图5可知,人工复核与串联机器人监测管片收敛互差在4 mm以内,在监测断面40处最大互差为3.8 mm,50个监测断面沉降平均互差为0.5 mm,通过人工复核进一步验证了串联测量机器人对隧道管片收敛监测数据的正确性与稳定性。
3.3 水平位移对比分析
基于人工全站仪测量隧道水平位移变形量验证串联测量机器人在隧道水平位移方向上的精度,将数据进行统计对比分析结果如图6所示,自动化测量水平位移累计变化量与人工测量水平位移变化量偏差如图7所示。
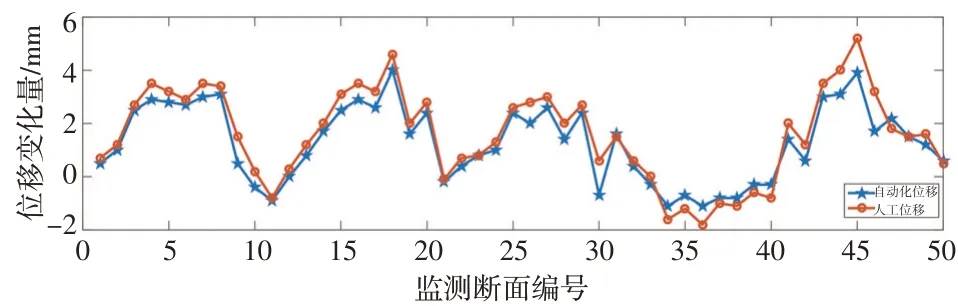
图6 人工复核与串联机器人监测水平位移累计对比分析

图7 人工复核与串联机器人水平位移沉降互差分析
由图6可知,基坑在开挖过程中对毗邻运营地铁隧道水平位移产生了变形影响,串联测量机器人监测数据显示在监测断面编号18处产生最大变形量为4.0 mm;人工全站仪监测数据显示在监测断面编号18累计水平位移变化量为4.6 mm;监测断面编号18自动化监测与人工复核的偏差为0.6 mm。总体而言,串联测量机器人自动化监测隧道水平位移与人工全站仪复核监测具有较好的一致性。由图7可知,人工复核与串联机器人监测隧道水平位移互差在1.5 mm以内,在监测断面46处最大互差为1.5 mm,50个监测断面沉降平均互差为0.3 mm,通过人工复核进一步验证了串联测量机器人对隧道水平位移监测数据的正确性与稳定性。
4 结语
基于串联TM50测量机器人对基坑在开挖过程中对毗邻运营地铁隧道沉降、管片收敛、水平位移进行自动化监测,通过人工复核数据验证了串联测量机器人在隧道自动化监测中的正确性与稳定性,基于测量机器人建立的自动化监测系统弥补了传统人工测量在实时性上的不足,串联自动化监测系统为临近地铁隧道基坑开挖安全施工提供了可靠保障,为地铁安全运营提供了数据支撑。
猜你喜欢
法律方法(2022年2期)2022-10-20
排灌机械工程学报(2022年6期)2022-06-23
煤气与热力(2022年4期)2022-05-23
少男少女·教育管理(2022年3期)2022-05-12
计算机应用与软件(2022年2期)2022-02-19
北京航空航天大学学报(2021年4期)2021-11-24
学苑创造·A版(2019年4期)2019-05-10
三联生活周刊(2017年37期)2017-09-11
大陆桥视野·下(2016年10期)2016-12-16
作文周刊·小学一年级版(2016年11期)2016-05-10