基于Emardson模型的GNSS-PWV转换系数精化
2022-10-31 10:20李黎侯晓玲张雯雯高颖赵伟陈国栋
地球物理学报 2022年11期
李黎, 侯晓玲, 张雯雯, 高颖, 赵伟, 陈国栋
1 苏州科技大学地理科学与测绘工程学院, 苏州 215009 2 苏州科技大学北斗导航与环境感知研究中心, 苏州 215009
0 引言
水汽在大气中所占比例很小,仅占大气体积的0.1%~0.3%,但它却是龙卷风、雷暴雨和台风等灾害性天气形成的重要因素之一(宋淑丽等, 2004; 毕研盟等, 2006),获取高时空分辨率的水汽资料可以提高降水预报的精度,减少灾害性天气给国民带来的经济损失.由于传统水汽观测方法的时空分辨率较低,限制了降水预报精度,实践中使用并不广泛(Baker et al., 2001).自Bevis等(1992)提出GNSS气象学以后,GNSS技术以其全球覆盖、全天候、精度高、垂直分辨率高(≤1 km)和费用低等优点逐渐成为获取大气可降水量 (Precipitable Water Vapour, PWV) 的重要手段之一.由GNSS技术(李黎等, 2012)解算得到的对流层延迟(Zenith Total Delay, ZTD)减去根据Saastamoinen模型计算的对流层干延迟(Zenith Hydrostatic Delay, ZHD)可得对流层湿延迟(Zenith Wet Delay, ZWD),ZWD再乘以水汽转换系数(K值)可得到GNSS-PWV,可见K值是影响GNSS-PWV反演精度的主要因素之一,因此研究并建立高精度的K值模型非常必要.
近40年来,GNSS气象学的发展开拓了高时空分辨率GNSS-PWV的应用研究(Bevis et al., 1994; Wen et al., 2012).而K值的精度在一定程度上受限于大气加权平均温度(Tm)的精度,不少学者已深入研究Tm并建立区域Tm模型.计算Tm需用到地表温度、气压和高程等信息,这些气象要素的实测精度和实时程度会进一步影响Tm的最终精度.Emardson和Derks(2000)基于欧洲数十个探空站资料,建立一个与位置和年积日相关的K值计算模型(Emardson模型).该模型未引入Tm参数,从而避免气象要素的误差积累,进一步简化了计算过程,在实时反演GNSS-PWV中有着广泛的应用前景.鉴于Emardson模型在不同地区适用性不同,姚朝龙等(2015)建立了一个适用于低纬度地区的K值模型,发现其精度主要取决于纬度和高程,与单站模型或者通过Tm计算的K值精度相当;刘立龙等(2016)选取新疆地区9个无线电探空站连续5年的探空资料,根据积分法获取的K值分析Emardson模型在该地区的时空适用性;刘立龙等(2017)分析了地理位置对于K值的影响,在广西地区建立的本地化K值模型显示顾及高程的Emardson模型精度更好;黄良珂等(2019)利用不同的K值模型反演拉萨站的GNSS-PWV,其结果与探空PWV具有较好的一致性,表明顾及高程的Emardson-H模型适用于缺乏气象参数的高海拔地区;侯晓玲等(2021)根据长三角地区7个探空站2年的探空数据,建立了顾及与不顾及高程的两个精化模型,发现在低海拔地区两种模型得到的GNSS-PWV精度相当.
鉴于Emardson模型具有地区差异性,中国地区缺乏统一的高精度K值预报模型,本文利用2018年中国地区的42个探空站资料,建立顾及与不顾及高程的两套Emardson精化模型,并以2019年K值作为参考,分析以上两个模型的K值预报精度,评估其在中国地区的适用性,以期快速获取GNSS-PWV,提高其在气象预报领域的实时应用效率.
1 数据处理方法与数据来源及分析
1.1 K值计算方法
利用探空数据所提供的气压、水汽压和温度等气象参数和积分法是目前应用最广泛的K值计算方法.
(1)

(2)
式中,Pv为平均水汽压(hPa),T为绝对温度(K),Δh为大气的厚度(m).T,Δh均可在探空资料中得到,Tm是指探空站上空水汽压与绝对温度沿天顶方向的积分值,是计算K值的关键参数.大气水汽一般分布在离地面12 km以下,故可以通过数值积分法来逼近Tm真值.在数值积分法中,观测误差与逼近误差的综合影响小于1 K(刘焱雄等, 2000),式(2)是目前公认精度最高的Tm计算方法(Duan et al., 1996; Ingold et al., 1998).Pv无法直接观测,但能通过露点温度和饱和水汽压公式间接计算,
Pv=6.112exp[17.62td/(243.12+td)],
(3)
式中,td为露点温度(℃).
1.2 PWV计算方法
根据GNSS技术解算,可以求得GNSS-ZTD(精度优于6 mm),一般时间分辨率为5 min.根据地面纬度、气压、高程等信息,基于Saastamoinen模型可精确计算ZHD(Saastamoinen, 1972):
(4)
式中,Ps为表面压力(hPa),φ为纬度,H为大地高度(km).测站位置确定后,ZHD是地表压力的函数,压力每增加1 hPa只会引起大约0.2 mm的ZHD误差(Tregoning and Herring, 2006).
通过GNSS-ZTD减去ZHD,可得到ZWD,ZWD与K相乘可得到GNSS-PWV.
(5)
1.3 数据来源及其分析
1.3.1 数据来源与测站信息
本文的探空资料来源于2018—2019年全国均匀分布的42个无线电探空站每天2次的实测数据,采样间隔为12 h,垂直分辨率为1 km.实测数据可从美国怀俄明大学天气数据网(http:∥weather.uwyo.edu/upperair/sounding.html)获取,包括气压、露点温度、高度、地面温度、相对湿度等气象要素,该机构以世界气象组织制定的规则为依据,已对资料进行质量检查.GNSS数据可从中国地震局GNSS产品服务平台(http:∥www.cgps.ac.cn/index.htm)获取(Zhao et al., 2015; Yu et al., 2019),其中包括GNSS-PWV及其梯度、气压、温度等参数,时间分辨率为1 h.
本文将用2018年中国地区的42个探空站积分法所得的K值建立两套Emardson模型,之后用2019年的42个探空站和11个GNSS站分别验证两套预报模型的K值精度及其PWV反演精度.图1是中国地区42个探空站和11个GNSS站的分布图,表1和表2分别是探空站和GNSS站的地理位置信息(包括站名、站号、代码、经纬度和高程等).
1.3.2K值与测站位置的相关性分析
我国地处太平洋西岸,横跨多个时区,本文以式(1)计算的2018年42个探空站K值作为真值,分析研究K值与测站经度和纬度之间的相关性,结果见图2.由图2可知,K值与测站经度之间的相关系数为0.592,二者的相关性较小;而K值与测站纬度之间的相关系数为0.735,变化趋势呈线性负相关,即纬度越高,测站K值则越小.因此,在建立K值精化模型时,测站经度的影响可以不予考虑,但需要把纬度作为建模的影响因子之一.
中国地区的地形总体呈现西高东低,且起伏较大,因此有必要分析K值与测站高程之间的线性关系.由图3可知,K值与测站高程呈负相关,K值随着测站高程的增加而逐渐下降,两者之间的相关系数为0.941,尤其高程在0~1000 m区间时,下降趋势更为明显.因此,在中国地区建立K值精化模型时,尤其需要考虑测站高程对K值模型精度的影响,要将高程作为建模的主要影响因子之一.

图1 中国地区探空站及GNSS站地理位置分布图Fig.1 Distribution map of selected radiosondes and GNSS stations in China
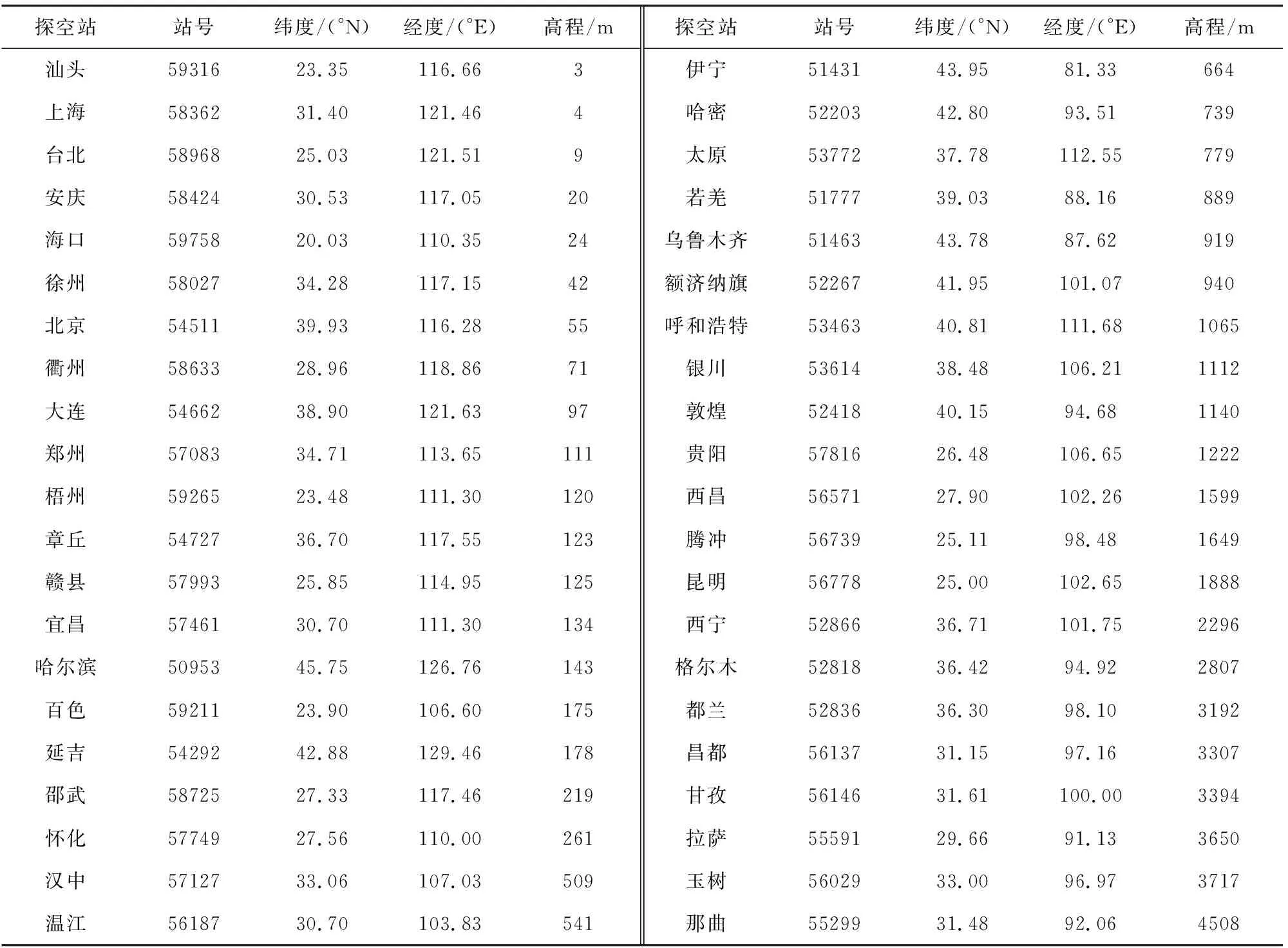
表1 中国地区42个探空站地理位置Table 1 Geographical position of 42 selected radiosonde stations in China
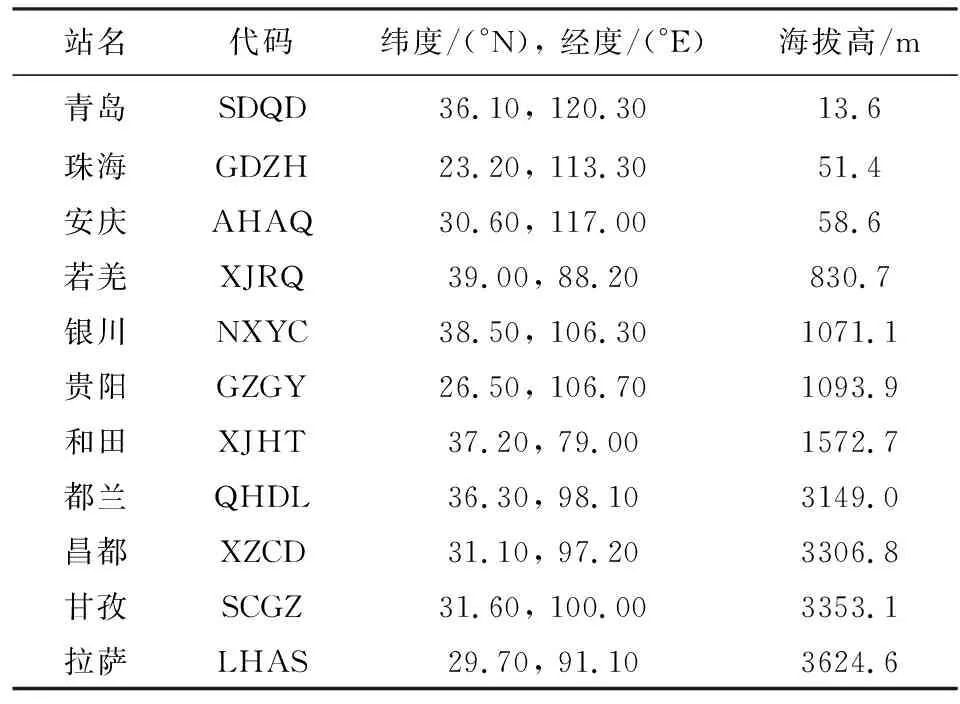
表2 中国地区11个GNSS站地理位置Table 2 Geographical position of 11 selected GNSS stations in China

图2 K值与探空站经度和纬度之间的相关性分析Fig.2 Correlation analysis between K value and longitude and latitude of the radiosonde stations
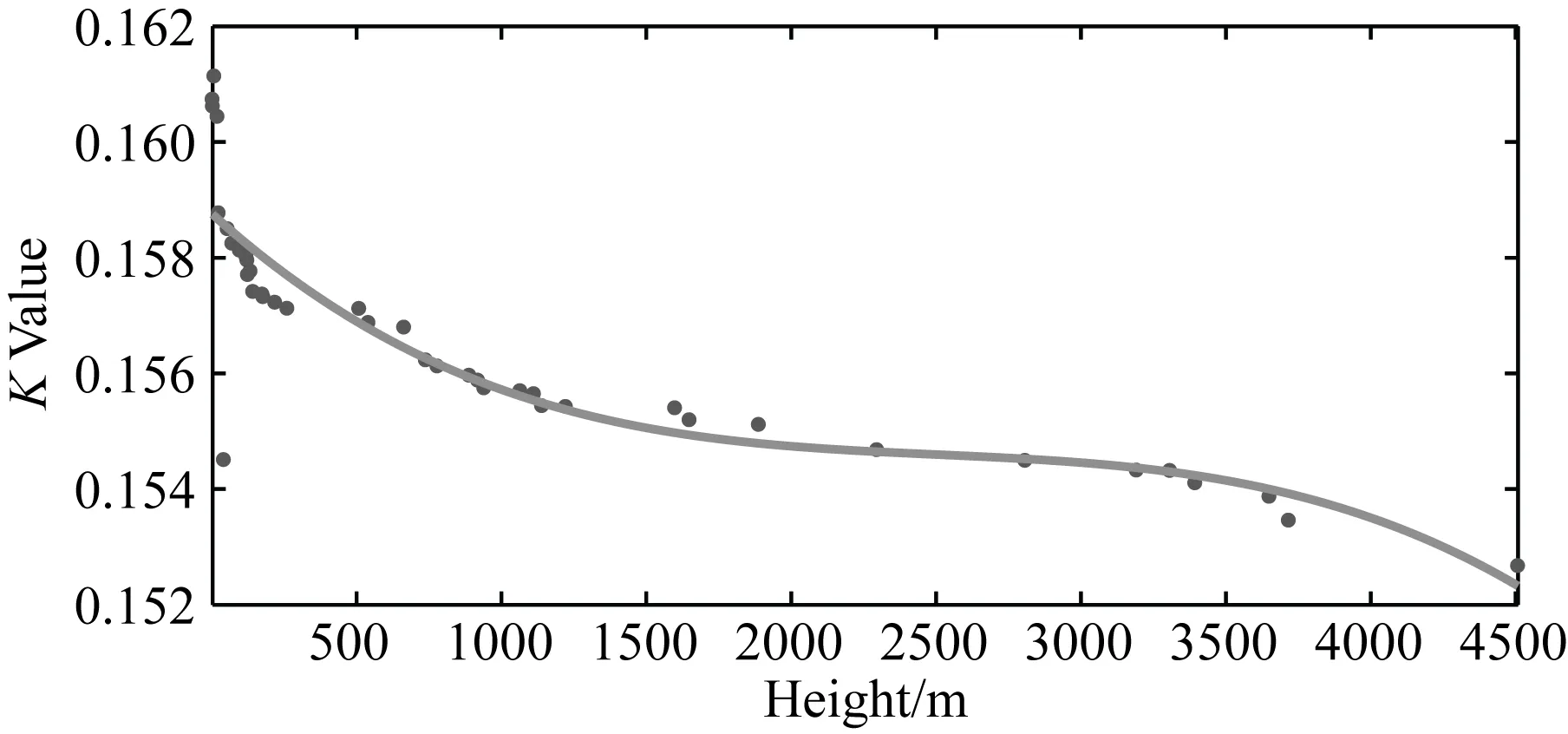
图3 K值与探空站高程的相关性分析Fig.3 Correlation analysis between K value and altitude of radiosonde stations
2 中国地区Emardson模型的建立及其精度分析
2.1 Emardson模型的建立
根据年积日、测站纬度和高程等时空特性与K值之间的相关性,分别建立基于测站纬度和年积日的Emardson-I模型和基于测站纬度、高程和年积日的Emardson-H模型(Emardson and Derks, 2000).
(6)
+α4H,
(7)
式中,φ为大地纬度(°),doy为年积日,H为高程(m),α0、α1、α2、α3、α4为模型系数,α0为常数,α1为φ的系数,α4为H的系数.
本文将2018年中国地区42个探空数据计算的K值作为真值,使用多元线性拟合法解算得到模型系数(如表3).

表3 中国地区的Emardson-I和Emardson-H模型系数Table 3 The model coefficients of Emardson-I and Emardson-H in China
结合表3、式(6)和式(7)可知,α1代表K值与纬度之间的关系,负值表示K值随探空站纬度的升高而减小,纬度每升高1°,K值约减小0.00023;α4代表K值与高程之间的关系,负值表示K值随探空站处高程的增加而减小,高程每增加1 m,K值则减小0.0000012.因此,在地形平缓的低海拔地区,K值随高程变化的影响较小;而在地形起伏较大时,尤其是我国西部3000 m以上的高海拔地区,高程对K值的影响不可忽视.
2.2 K值预报精度分析
利用2.1节得到的Emardson-I和Emardson-H模型预报2019年42个探空站处的K值,以2019年积分法K值作为参考真值,评估两套K值模型的预报精度.限于篇幅,图4给出了19个探空站基于两套模型的预报K值与积分法K值(当作真值)的时序对比.
由图4可知,在低海拔地区(<600 m,上海、海口、北京、章丘、百色、怀化、汉中)和高海拔地区(>1500 m,西昌、昆明、西宁、甘孜、拉萨、玉树、那曲),两套模型的预报K值相差较大,最大达到0.004.而在中海拔地区(600~1500 m,伊宁、太原、乌鲁木齐、呼和浩特、贵阳),两套模型的预报K值偏差很小,尤其是太原、贵阳和呼和浩特等站,均仅相差0.0001,可见在我国中海拔地区,高程对Emardson精化模型影响很小.
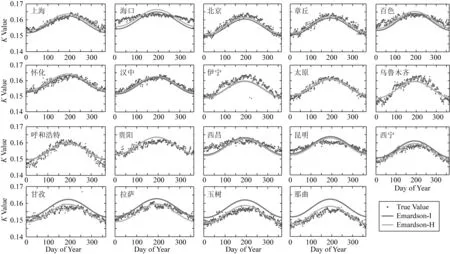
图4 Emardson-I和Emardson-H模型的2019年预报K值时序变化Fig.4 Time series variation of predicted K value based on Emardson-I and Emardson-H models in 2019
就两套K值预报模型的时序变化而言,积分法K值与Emardson-H模型的一致性更好,并且海拔越高,Emardson-H模型预报的K值精度也会越高.就中海拔地区而言,Emardson-H模型与Emardson-I模型预报K值与积分法K值相差很小.
表4统计了高中低不同海拔19个探空站的K值预报精度.从表中可知,中国地区Emardson-H模型的适用性相对较好,所得结论与图4类似.低海拔地区的Emardson-H模型的K值预报精度较Emardson-I模型略有提高,其预报K值的平均绝对误差(MAE)均值和均方根(RMS)均值分别为0.00144和0.00173,均优于Emardson-I预报模型的0.00183和0.00218;在中海拔地区,Emardson-H模型相对于Emardson-I模型的K值预报精度提升很小,RMS均值从0.00208提高到0.00202;而在高海拔地区,Emardson-H模型相对于Emardson-I模型的预报精度得到了显著的提升,RMS均值从0.00312提高到0.00181.从表4中还可以看出,用Emardson-I模型预报的K值RMS变化较大,在0.001~0.006之间,海拔越高,偏差越大;而利用Emardson-H模型预报的K值RMS集中在0.002左右,稳定性比前者有大幅度改善.
2.3 GNSS-PWV反演精度分析
2.3.1 GNSS-PWV时序变化及其偏差
由表1和表2可知,安庆、银川和拉萨等处的探空站和GNSS站距离较近,高程相差最多38 m,可认为探空站与GNSS站所受到的对流层延迟非常接近,可用探空PWV作为真值来检验基于Emardson-I和Emardson-H模型的GNSS-PWV精度和可靠性.
限于篇幅,本文仅选择6个不同海拔的探空站和GNSS并址站,分析利用Emardson-I和Emardson-H模型的预报K值反演的2019年GNSS-PWV和探空PWV时序变化.如图5所示,两组GNSS-PWV与探空PWV在变化趋势上表现一致,PWV波峰出现在夏季,PWV波谷出现在冬季,峰值和谷值基本吻合,符合中国夏季多雨、冬季干燥的气候特点,说明两套模型反演的GNSS-PWV具有较高的一致性.
由两套模型计算的GNSS-PWV与探空PWV之间的偏差图可看出,基于Emardson-H模型的GNSS-PWV偏差均小于Emardson-I模型,且夏季的GNSS-PWV偏差较大.在高海拔地区(昌都、拉萨),GNSS-PWV偏差范围相对较小(-0.5~0.5 mm);在中海拔地区(银川、若羌),基于Emardson-I和Emardson-H模型的GNSS-PWV偏差范围相对较大(-1.0~0.5 mm);而在低海拔地区(安庆、青岛),PWV偏差范围相对更大(-2.0~0.5 mm),但基于Emardson-H模型的GNSS-PWV更接近探空PWV,比Emardson-I模型有更为明显的改善.
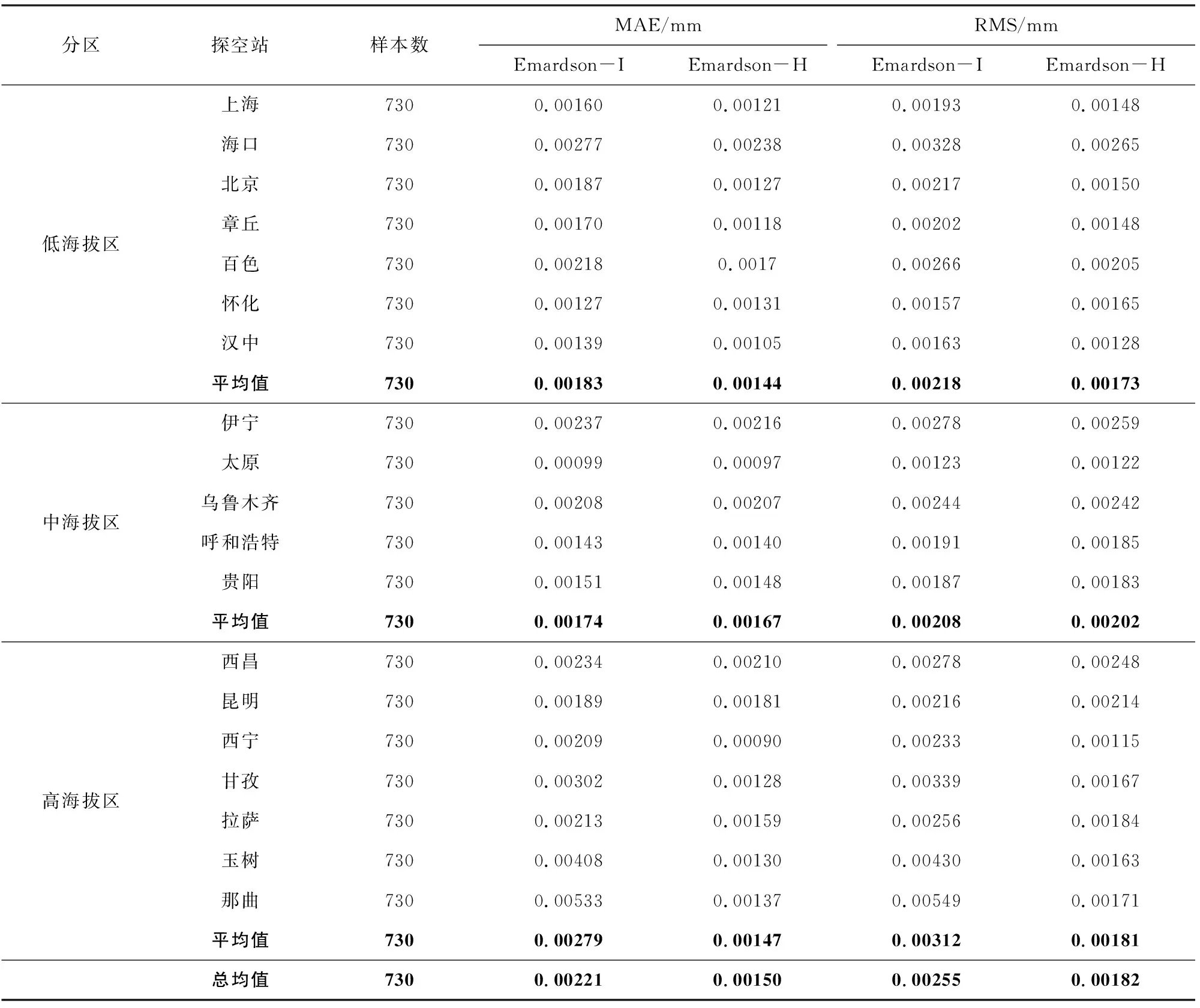
表4 2019年基于Emardson-I和Emardson-H模型的K值预报精度Table 4 Prediction accuracy of K value based on Emardson-I and Emardson-H models in 2019
2.3.2 GNSS-PWV精度
由表5可以得到,低海拔地区(青岛、安庆)基于Emardson-I模型的GNSS-PWV的MAE均值为0.629 mm,RMS均值为0.752 mm,而基于Emardson-H模型的GNSS-PWV的MAE和RMS均值分别为0.433 mm和0.530 mm,RMS降低了0.222 mm;中海拔地区(若羌、银川、贵阳)基于Emardson-I模型的GNSS-PWV的MAE均值为0.274 mm,RMS均值为0.342 mm,而基于Emardson-H模型的GNSS-PWV的MAE和RMS均值分别为0.266 mm和0.333 mm,RMS仅降低了0.009 mm;而高海拔地区(和田、都兰、昌都、甘孜、拉萨)基于Emardson-I模型的GNSS-PWV的MAE均值为0.159 mm,RMS均值为0.213 mm,而基于Emardson-H模型的GNSS-PWV的MAE和RMS均值分别为0.119 mm和0.154 mm,两种模型的RMS相差在0.1 mm以内.
综上所述,在中国地区,基于Emardson-H模型的GNSS-PWV反演精度明显高于Emardson-I模型,其MAE和RMS均值均优于Emardson-I模型.在中高海拔地区,基于Emardson-H模型的GNSS-PWV相对于Emardson-I模型,精度有所提高,但提高有限;相比而言,Emardson-H模型在低海拔地区的改正效果更为明显,这是因为低海拔地区的ZTD和PWV值均较大,高精度K值更加有利于提高GNSS-PWV精度,说明在低海拔地区考虑高程因子同样重要.
3 讨论与结论
水汽作为重要的气象要素之一,是灾害性天气形成的重要因子,在降水监测和天气预报中扮演着关键角色.中国幅员辽阔、地形起伏大、探空站时空分辨率低,导致大部分区域的水汽资料比较匮乏.地基GNSS技术能探测高时空分辨率PWV,而K值是从GNSS-ZTD转换到GNSS-PWV的重要参数.因此,本文基于Emardson模型建立了两套适合中国地区的高精度K值模型,重要结论如下:

(续图5)

图5 2019年基于Emardson-I和Emardson-H模型的GNSS-PWV时序变化及其偏差Fig.5 Time series variations and their deviations of GNSS-PWV based on Emardson-I and Emardson-H models in 2019

表5 2019年基于Emardson-I和Emardson-H模型的GNSS-PWV精度统计Table 5 The accuracy statistics of GNSS-PWV based on Emardson-I and Emardson-H models in 2019
(1)K值建模需要考虑纬度和高程这两个关键参数.K值与测站纬度和高程之间呈负相关,其相关系数分别为0.735和0.941,而与测站经度的相关性较小.
(2)Emardson-H模型的K值预报精度优于Emardson-I模型,在高海拔地区尤为明显.Emardson-H模型预报的K值MAE和RMS均值分别为0.00150和0.00182,均优于Emardson-I模型的0.00221和0.00255.
(3)基于Emardson-H模型的GNSS-PWV精度也优于Emardson-I模型,尤其在低海拔和高海拔地区.基于Emardson-H模型的GNSS-PWV的MAE和RMS均值分别为0.226 mm和0.283 mm,均优于基于Emardson-I模型的0.288 mm和0.360 mm.
综上所述,就K值而言,Emardson-H模型预报的K值精度优于Emardson-I模型,尤其在高海拔地区;而就GNSS-PWV来说,不仅在高海拔地区,并且在低海拔地区,Emardson-H模型反演的GNSS-PWV精度均优于Emardson-I模型.这是因为低海拔地区的ZTD值较大,高精度K值更有利于提高PWV反演精度,说明本文所建立的全国K值Emardson模型适用于大部分地区.但分析图4可以发现,某些探空站(比如海口、伊宁、乌鲁木齐、西昌等)在春冬季节的模型预报K值偏差较大,意味着K值模型不仅仅要考虑年积日、纬度和高程,可能也要考虑当地的季节变化和气候特征;此外,本文仅考虑了影响因子的线性特征,而没有考虑各参数的非线性变化特点,后续我们还可基于以上两点进一步完善该模型.
致谢感谢美国怀俄明大学天气数据网和中国地震局GNSS产品服务平台为本文提供了探空站资料和GNSS数据.
猜你喜欢
测绘地理信息(2022年2期)2022-04-02
成都信息工程大学学报(2021年3期)2021-11-22
气象与环境科学(2021年3期)2021-07-14
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
军民两用技术与产品(2019年7期)2019-07-26
齐鲁周刊(2017年29期)2017-08-08
中学政史地·教学指导版(2016年12期)2017-05-16