基于Arduino单片机的智能防抖筷*
2022-10-31 07:54郝健淇张政宸石春花
山西电子技术 2022年5期
郝健淇,张政宸,韩 磊,石春花
(1.长治医学院医学影像学系,山西 长治 046000;2长治医学院生物医学工程系,山西 长治 046000)
数据统计[1],截至2020年底,全国60岁及以上老年人口占总人口的比重为16.7%,其中,患有帕金森症的老人超过200万。为帮助帕金森症老人独立进食,研究人员设计了一些便携实用的装置,其中,以谷歌公司旗下的电子防抖勺Liftware和GYENNO旗下的“睿餐”防抖勺为代表,但这些产品造价昂贵,尚未广泛使用。基于此,本文设计了一套智能防抖筷勺系统,利用陀螺仪和加速度传感器检测手部运动;由防抖控制算法驱动直流减速电机和传动装置实现两个自由度的反向补偿运动,达到防抖的目的。
1 总体设计
本系统由机械结构和控制电路两部分组成,整体设计如图1。装置外壳符合人体工程学设计理念[1-2],设有一系列凹槽,方便老人进行手部定位,同时外壳角度设计合理,握持更加舒服,适合长时间使用。
2 电路设计
2.1 设计思路
系统电路由单片机控制电路[3]、电机驱动、姿态测量、自动夹持四个部分组成。其中,控制电路采用Atmel Atmega328单片机作为核心处理器,辅以电平转换模块和A/D转换器;电机驱动电路以tb6612电机驱动模块和直流减速电机为主;姿态测量电路以MPU6050六轴陀螺仪[4-5]为主;自动夹持电路以激光测距传感器和舵机为主。另外,整个系统由3.7 V的微型航模锂电池配合5 V稳压模块供电。设计中,利用MPU6050作为检测元件,采用卡尔曼滤波算法读取位置传感器的偏转角度,采用PID算法对电机偏转角度进行控制,是设计的核心部分;利用陀螺仪和加速度传感器检测手部运动的偏转角度,采用高速直流减速电机驱动防抖结构做与抖动方向相位相反的俯仰振动或左右摆动,实现防抖功能。
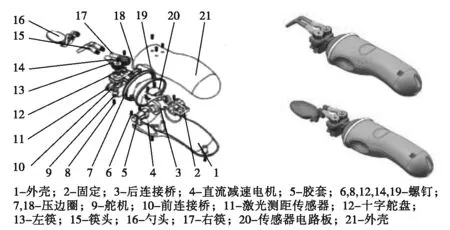
图1 整体设计
2.2 键模块选择
1) 激光测距模块
激光测距传感器VL53L0X体积较小且精度高,非常适合中短距离的测量。为检验该模块的测距准确性,实验数据如表1所示。结果表明,在所取的测距数值中,绝对误差在20 mm以内,最大相对误差≤4%,测量性能优于超声波、红外线等测距传感器。
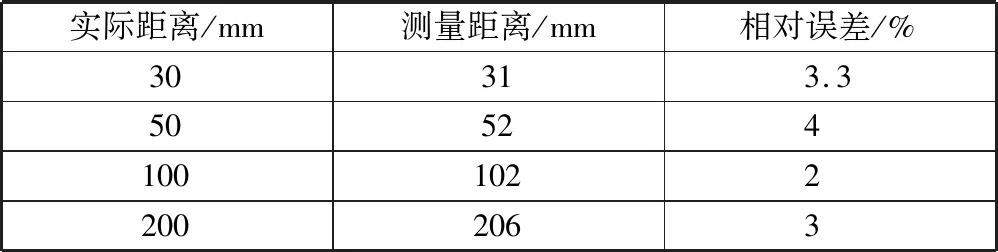
表1 VL53L0X测试数据结果
当激光测距传感器检测到设定的测量范围内(到筷头处)有食物存在时,传递单片机信号,然后单片机通过输出PWM波控制伺服电机的转动,进而控制筷头实现夹取功能;当激光测距传感器检测到设定的测量范围内(到筷头处)无食物存在时,单片机控制舵机张开一定角度,以便下次夹取食物。
2) 姿态测量传感器
采用MPU6050陀螺仪模块作为姿态测量传感器,该芯片灵敏度高、温漂小、可重复性高、测量范围和分辨率均满足使用需求。该模块将手部动作中三个轴的加速度数据、角速度数据、角度数据转变为电子信号,利用其实现手部抖动时的信号检测,即将陀螺仪安装在筷头部分,检测筷头部分相对于水平面的偏转角度。然后通过I2C通信模式传递给单片机,单片机控制电机反向偏转相同角度,实现防抖的功能。
3 软件设计
系统执行流程为:开启防抖功能后,初始化各模块,首先,MPU6050传感器检测筷头的空间姿态信息,发送测量数据到微处理器;其次,微处理器接收传感器发送的运动参数通过卡尔曼滤波算法进行优化处理;接着,通过防抖控制PID算法输出PWM波控制电机转动,进行反向补偿运动,从而实现防抖的效果。
3.1 姿态测量算法
姿态解算算法采用卡尔曼滤波算法[7]。因为其无偏性,估计方差最小,实时性好等优点广泛应用于各种控制领域。本系统采用的姿态测量算法如图2所示。
为了验证卡尔曼滤波算法在勺头姿态解算上是否有效,使用陀螺仪测到的一组数据,在MATLAB软件[8]中用卡尔曼滤波算法程序进行仿真(如图3),其中,横坐标为测量时间,纵坐标为测量角度。结果表明,滤波前,测量值和真实值之间误差平均值是3.79×10-1,滤波后,测量值和真实值之间误差平均值为1.55×10-1,说明卡尔曼滤波算法可以很好地优化传感器所测结果,噪声处理能力也较好,即,滤波效果良好。
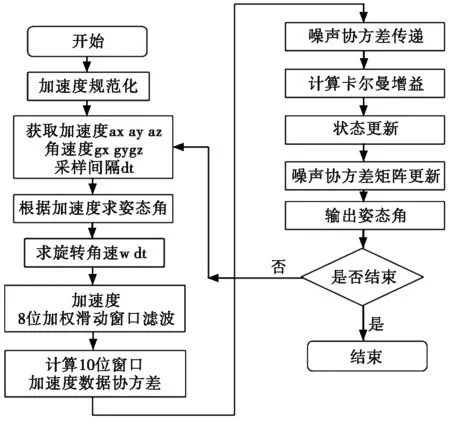
图2 姿态测量算法框图
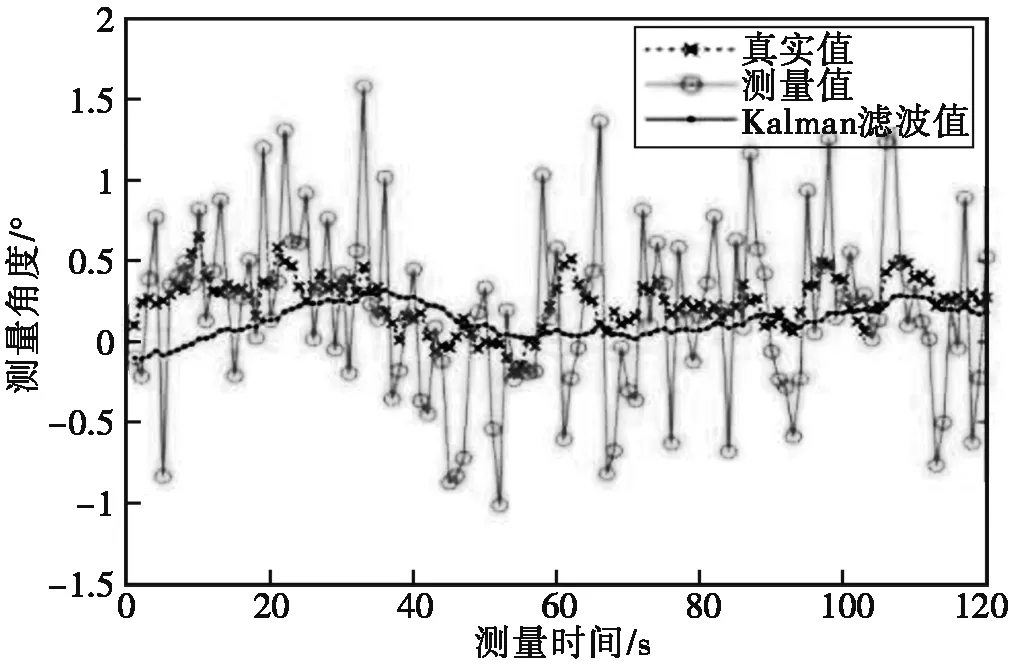
图3 卡尔曼滤波姿态解算
3.2 PID算法
PID算法的最终目的是生成控制直流减速电机的PWM信号,具体方法是摆动筷头,观测输出的PWM波形,电机转动的角度以及平衡的位置。若电机转动的角度在相对于设定角度大幅度摆动,则把PID算法中的P调小;若电机转动较慢到达设定角度,则调大P。如此反复调试观察,直至调试出最优的PID参数。
本系统用到了PD算法和PI算法。实验结果为:PD环参数P=-39,I=0,D=-0.52,PI环参数P=-4,I=-0.12,D=0时,系统的稳定性,快速性和准确性较好。
4 测试结果
4.1 防抖算法验证
为了验证算法的控制效果,手握持防抖勺勺柄,将勺头悬空,分别在开启防抖和关闭防抖的状态下进行测试。图4表示防抖勺手柄受到频率为6-12 Hz的手部抖动干扰,勺头负载重量为15 g时的速度控制效果,黑色V1曲线是开启防抖功能后传感器采集到勺头的速度信号,红色V2曲线是未开启防抖功能时勺头的速度信号。通过曲线可以看到,该防抖控制算法可以有效减少手部的抖动,具有较好的控制效果。
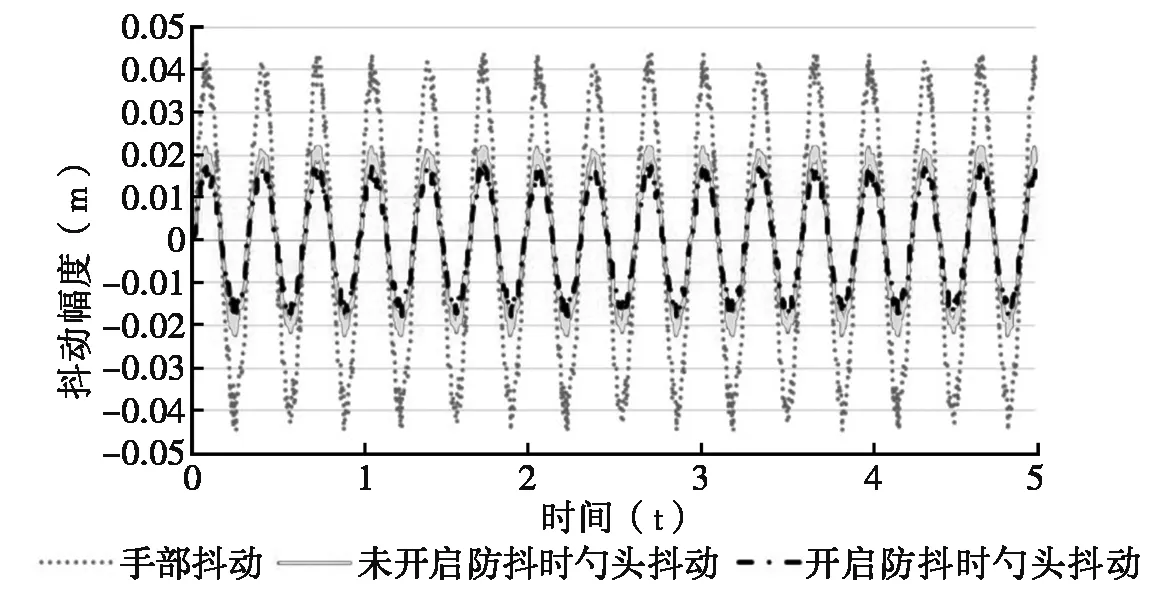
图4 勺头抖动幅度曲线图
4.2 重要零件强度与刚度校核
PLA材料拉伸强度为80 Mpa-90 Mpa[2],弯曲模100 Mpa-150 Mpa。通过有限元分析软件可以得到加载力为1 N时后连接桥、前连接桥和右筷的平均应力和变形量,如图5。分析表明,后连接桥、前连接桥和右筷的变形量都很小,最大变形量在边缘处,后连接桥在边角处产生的最大应力为8Mpa,小于屈服强度,故这三个重要零件的选用满足要求。

图5 有限元仿真图—后连接桥平均应力
4.3 夹取力测试
对生活中用筷子夹取不同食物时所需的力做了一系列夹取力测试的实验,如表2,由此可见,夹取食物的夹紧力较小,舵机的扭转力矩能够满足要求。
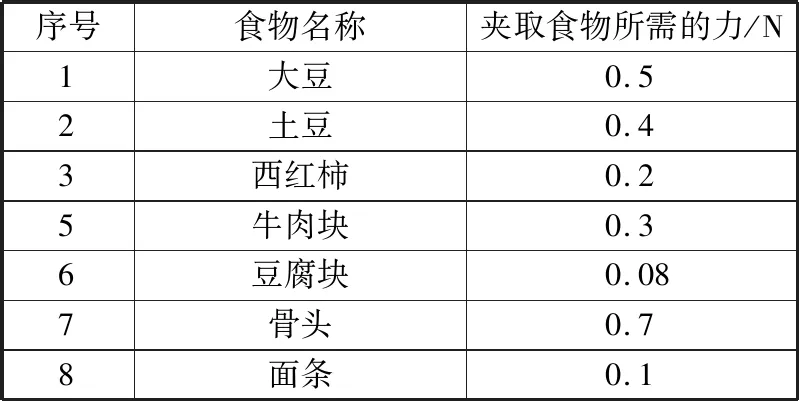
表2 夹取食物所需夹紧力
5 结论
本文设计了一套智能防抖筷勺装置。该装置利用陀螺仪和加速度传感器检测手部运动,由防抖控制算法驱动直流减速电机和传动装置实现两个自由度的反向补偿运动,达到防抖的目的。该系统具有以下特色:更符合中国人用筷子的习惯,可以较为方便地夹取食物;采用自研防抖算法,能够实现较好的防抖效果;外壳采用人体工程学设计,握持舒适,使用方便;成本较低,性价比高,具有一定的实用价值,市场前景广阔。经过综合的实验测评,装置具有较为良好的防抖功能,能够实现自动夹取功能,成本较低,性价比高。总之,本装置方便,便携,有效地解决了老年人或帕金森患者独自吃饭难的问题,具有一定的实用价值。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
学生天地(2020年3期)2020-08-25
测控技术(2018年12期)2018-11-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
北京航空航天大学学报(2017年9期)2017-12-18
童话世界(2017年11期)2017-05-17
电测与仪表(2016年21期)2016-04-11
电源技术(2016年9期)2016-02-27
中华皮肤科杂志(2014年4期)2014-12-19