基于双目立体视觉的汽车轮毂型号识别研究*
2022-10-31 07:54吴俊杰陈艺文楼国红张俊生
山西电子技术 2022年5期
吴俊杰,陈艺文,楼国红,张俊生
(1.太原师范学院,山西 晋中 030619; 2.太原工业学院,山西 太原 030008)
0 引言
随着图像技术、汽车等行业的不断发展,图像处理与视觉技术能够对复杂目标进行识别,在生产自动化及工业产品的检测与智能分类中得到越来越广泛的应用。在传统轮毂生产流程中,轮毂铸造生产后需要人工识别、统计型号并进行分类,工作量大、效率低、成本高[1]。
目前,美国爱迪生工业系统中心的Behrouz N.Shabestari等人研制出了一种实时性强、成本低的汽车轮毂分类识别系统[2]。华中科技大学朱焜[3],针对带有较大毛刺的毛坯轮毂图像进行了幅窗多边形形状化简来进行特征提取。中北大学的郭智杰[4]通过提取了轮缘直径和轮毂高度作为尺寸特征,并提取辐条数目、幅窗周长面积比等作为形状特征,最后通过序列号匹配识别型号。但是,以上研究并未考虑轮毂的深度信息,由于刚生产出来的轮毂轮辐与轮辐之间可能并没有完全的间隙,如果使用单目相机进行测量轮辐数量时,就会出现测量不准确,这种情况会被认为无法识别或者误识别。
针对以上问题,本研究提出一种基于双目立体视觉的轮毂型号识别研究,通过改进双目立体视觉算法,提高三维重建的精度,减少误差,能够有效地提高识别准确率。
1 研究方法
1.1 图像采集
在进行图像采集前,由于相机结构和相机制造工艺等因素的影响,镜头都存在不同程度的畸变,因此需要进行相机标定,获取每个相机的内部参数以及相机之间的位置信息。本研究采用张正友标定法,该方法具有较高的标定精度且鲁棒性好。在搭建双目立体视觉系统时,由于现实中不存在完全平行的两台相机,所以在实际操作中,将标定好的两台相机进行Bouguet极线立体校准,以减少相机误差和因相机摆放位置造成的图像偏移。
1.2 图像预处理
相机拍摄的图像都具有一定的噪声[5],因此在使用之前需对其进行降噪处理。本研究使用双边滤波进行降噪处理,双边滤波在平滑图像和降低噪声的同时,对轮毂的边缘信息具有很好的保留效果,有利于后续的操作,如图1(b)所示。图像分割能够使目标信息与图像背景分为两个部分,本文使用最大类间方差法[6]对图像进行分割,分割完成后使用形态学运算[7]去除毛刺等微小结构并填补孔洞。其中,开运算可以消除细小物体图像、平滑物体图像的边缘;闭运算可以填充图像存在的细小的空洞。运算效果如图1(c)所示。
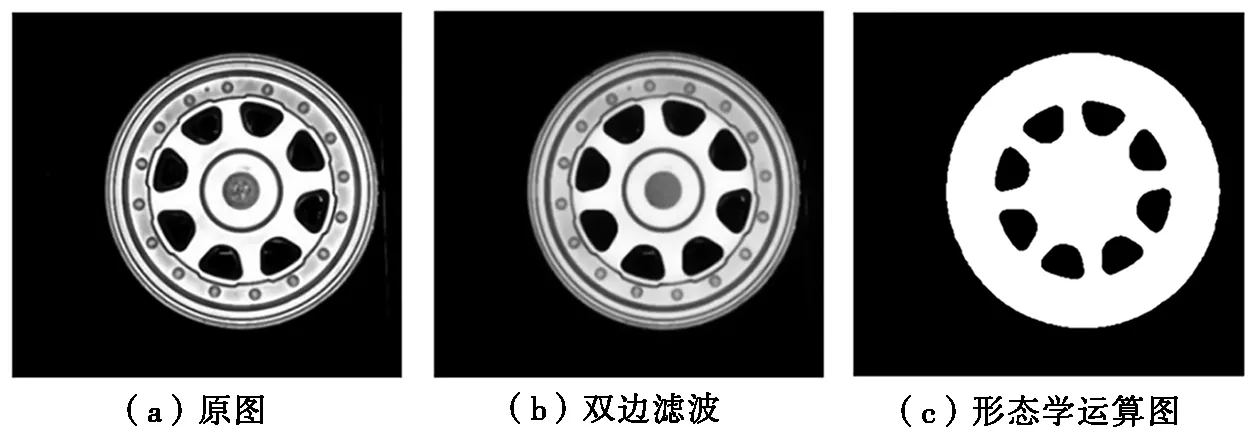
图1 原图和运算后图像
1.3 SGBM算法立体匹配
SGBM算法[6]是半全局匹配算法,该算法可以进行稠密匹配且消耗的时间少于全局匹配,实验的鲁棒性较高。由SGBM匹配算法可得,灰度值大的表示距离相机较近,即深度值小;反之则距离相机较远。
1.4 特征提取
1) 轮毂轮廓特征
轮毂轮廓特征是十分重要的一个识别特征,本研究在提取轮毂轮廓特征时先将轮毂图像进行预处理,然后进行Canny算子[8]提取特征边缘。
2)轮辐个数
由于轮毂生产的轮辐基本位于距轮毂圆心的4/10半径至7/10半径区域内,因此本文计算轮毂轮辐个数时首先在此区间分三个等距的同心圆环,这样可以保证至少有一个圆环与轮辐相交。随后将轮毂二值化图像与圆环图像做与运算,统计各个同心圆环的轮辐个数,选取最多的轮辐个数,但是由于轮辐与轮辐之间可能存在铸液连接,因此需计算该半径下圆的深度值,统计深度值变化次数的一半即为轮辐个数,如图2所示。
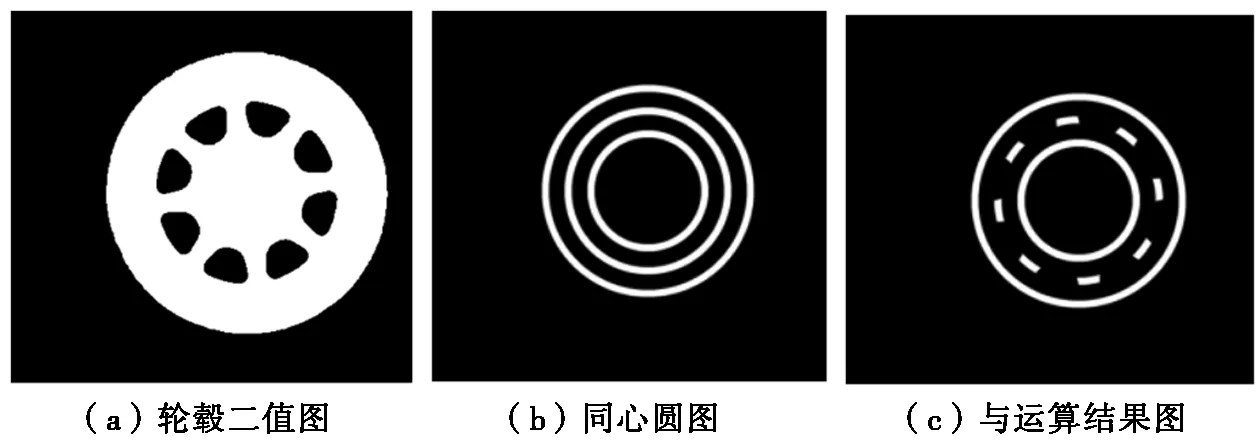
图2 获取轮辐个数
3) 轮毂直径
轮毂直径可以描述不同类型和尺寸的轮毂,具有重要作用。本研究使用最小二乘法提取拟合圆,用来获取左右图像大致视差。接着在左右图像提取特征点进行立体匹配,得到准确视差值。本文使用的特征点为轮毂外圆上每隔45o选取一个特征点,在立体匹配过程中主要是找到两幅图像的特征点的点对即可。获取对应点视差值后,计算出其三维坐标。由于提取的轮毂外圆上的特征点具有对称性,因此,直径可以直接由对称的空间点的距离公式求出来。
(1)
将空间点带入公式,计算直径,并计算平均值,用于代表作为测量的直径值。
4) 轮毂高度
轮毂的高度信息通过轮毂外圆的深度坐标取均值得到。
1.5 优化双目立体视觉算法
为了提高立体匹配精度,本研究通过调整相机的基距与光轴角度来优化双目立体视觉算法。空间点P坐标可以表示为:
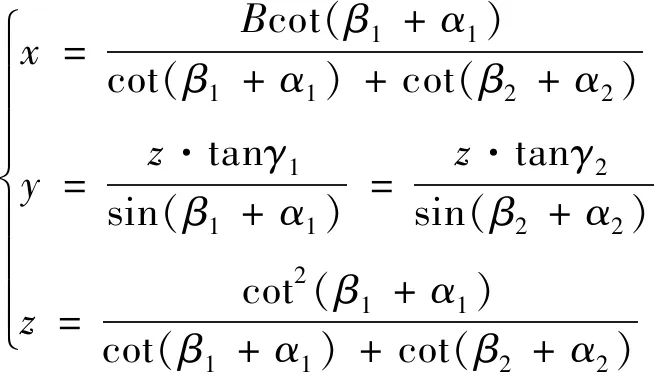
(2)
其中,α1和α2为光轴角度与相机基距B的夹角;β1和β2分别为O1P′、O2P′与相机光轴的夹角;γ1和γ2分别为O1P′、O2P′与O1P、O1P的夹角。
经过分析可得,空间点坐标的精度受到相机基距和光轴角度的影响,主要为:
1) 基线距离B是工作距离的0.8~2.2倍时测量误差较小;
2) 双目立体视觉的结构对称时,测量系统的误差比较小且精度高;
3) 当左右相机光轴与双目基线的夹角相同时,相机光轴与双目基线的夹角在(30°,50°)区间时,对目标测量比较一般;当夹角在(15°,30°)区间时,此时对远处测量精度比较高;当夹角在(50°,75°)区间时,此时对近处测量精度比较高。
2 轮毂识别分类
基于灰度的模板匹配算法是指提取待识别图像的灰度值作为特征值与模板轮毂图像进行灰度值相关匹配。其中,NCC算法又称归一化互相关算法,其算法思想是根据相关系数公式计算待匹配图像与模板图像之间的相关系数。NCC的取值范围为-1≤NCC≤1,当NCC值越大时,相似性越高,最大值处即为最佳匹配处。本文采用NCC算法,将模板图像在待识别轮毂图像上平移,并计算NCC的值,找到最佳匹配模板图像。
在轮毂识别分类前,需制作轮毂型号模板库,首先选择表面平滑的轮毂,对图像采用双边滤波进行降噪处理;使用最大类间方差法优化轮毂图像;使用SGBM算法进行三维重建计算轮毂的高度和直径等信息;将轮辐个数作为第一目录,轮毂高度作为第二目录;利用Canny算子获取轮毂边缘轮廓,并将该图像以轮毂型号为文件名存放在对应高度目录下。在进行轮毂识别分类时首先计算轮毂辐条的个数并进行筛选第一目录,其次计算轮毂高度筛选第二目录,由于轮毂高度计算可能存在误差,因此选取计算值上下两个二级目录,然后对两个目录下的轮毂模板进行匹配得出轮毂型号。这种方法避免了对所有模板都进行匹配,可以高效地获取当前轮毂的型号。本研究使用了5种不同型号的轮毂,每种轮毂各200个,分别进行识别率测试,在相机基距等于工作距离,光轴角度在50°~75°之间时,轮毂表面特征信息清晰,高度信息误差较小,此时模板匹配时间较快,平均每个识别用时约109 ms。
3 结语
本研究的研究方向是利用双目立体视觉的方式减少轮毂深度信息获取不全面的问题,对轮毂生产厂家的毛坯轮毂进行识别,通过三维重建获取轮毂直径和高度信息,以及模板匹配进行轮毂型号识别,优化双目立体视觉算法识别轮毂型号有较高的精确度,精确度达到了98.65%。研究结果表明该方法对轮毂型号识别具有明显的研究和应用价值,并且对低成本、高效率的识别轮毂型号具有一定的重要意义。
猜你喜欢
上海涂料(2021年5期)2022-01-15
电子制作(2019年20期)2019-12-04
北京汽车(2019年6期)2019-02-12
测控技术(2018年4期)2018-11-25
制造技术与机床(2017年10期)2017-11-28
制造业自动化(2017年2期)2017-03-20
轮胎工业(2017年3期)2017-03-10
现代计算机(2016年11期)2016-02-28
大型铸锻件(2015年1期)2016-01-12
东南大学学报(自然科学版)(2015年6期)2015-03-12