自动化集装箱码头视频监控系统设计
2022-11-01 05:35殷婷婷吴俊孟
水运工程 2022年10期
殷婷婷,吴俊孟,钱 龙
(中交第四航务工程勘察设计院有限公司,广东 广州 510290)
现代化港口的机械化、自动化、智慧化程度日益增加,高效率、低人工、高稳定性、低风险的港区运营模式成为码头营运者最为关心的问题。视频监控系统实现了生产调度人员在控制室即可远程监控港区运营情况,安保人员在安保中心即可完成港区的安全防范,且比巡逻更为安全、可靠,因此视频监控系统成为了现代化港口不可或缺的设施之一。随着我国的自动化集装箱码头逐步推广、发展,视频监控系统的设置也随之发展,以适应自动化集装箱码头的特点。
1 自动化集装箱码头监控特点
1.1 常规集装箱码头视频监控特点
专业集装箱码头分为常规集装箱码头与自动化集装箱码头。常规集装箱码头堆场通常平行于码头前沿线布置,堆场区域移动机械如吊机、叉车、集卡等有序运行,但堆场操作人员较多,区域划分不甚严格。视频监控范围主要有码头前沿水域、前沿装卸区域、堆场装卸区、仓库和车间内部辅建区以及场地四周围网。其中堆场装卸区根据箱区布置,监控重点在于纵横主干道和箱区间集卡通道,通常在高杆灯或摄像机立杆等高点设置覆盖主干道各方向的监控摄像机,以监控主干道车流量和运行情况。箱区间车道两侧通常在高点各布置1台摄像机监控车道内集装箱吊装情况和集卡运行轨迹。由堆场摄像机布置原则和安装位置来看,常规集装箱码头监控布置大多侧重监控车道是否畅通、装卸过程是否正常,安装位置大多为高点安装。
1.2 自动化码头监控特点
自动化集装箱码头与常规集装箱码头最大不同在于前沿和堆场内的装卸流程、生产区内堆场区布置以及自动化与非自动化区域的分隔。辅建区、进出闸口、各建筑单体等与常规集装箱码头做法基本相同,布置没有明显区别。
以钦州港大榄坪南作业区7#、8#泊位集装箱自动化改造工程为例,工程拟将已建2个7万吨级多用途泊位改造成专业化全自动化集装箱码头。集装箱堆场采用堆场垂直码头前沿线、外集卡作业车道呈U形且与IGV车道间隔并列的布置方式。码头前沿装卸设备采用自动化双小车岸桥,水平运输采用智能导引车(IGV),见图1。堆场采用双悬臂自动化集装箱龙门吊结合IGV、外集卡的作业方式,IGV车道和外集卡车道分别在龙门吊悬臂两侧进行装卸作业,见图2[1]。

图1 前沿作业地带布置
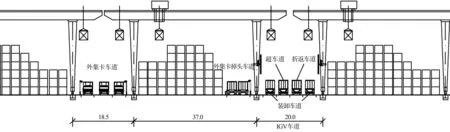
图2 堆场作业断面(单位:m)
在自动化集装箱码头装卸过程中,除外集卡车辆外其余装卸机械均无现场操控人员,整个装卸流程的管控很大程度上依赖于远程视频监控实现,因此现场生产流程视频监控必须覆盖每一个环节,其中码头前沿作业地带和堆场龙门吊装卸车道为生产流程监控的重点。
为保证自动化装卸的高效性,生产区域,尤其是自动化区域和非自动化区域须严格划分。码头前沿作业地带外集卡车道和自动化装卸车道间、堆场外集卡车道和IGV车道间均由围网分隔,且为视频监控重点。
智能导引车接收到装卸指令后由车载控制器分析、计算出行驶线路,导航系统提供定位和航向以行驶到准确的装卸位置[2],在整个运行过程中没有现场人员参与。为了保证生产的安全性,自动化区域必须严格控制人员入内,非自动化生产区域内的人员则必须控制在指定区域,如堆场外集卡车道内的集卡驾驶员在装卸的全过程不得离开驾驶室,因此生产区人员违规进入、违规翻越等行为是视频监控的重点。
2 自动化集装箱码头监控要点
2.1 生产流程监控要点
大榄坪南作业区7#、8#泊位生产流程如下:
1)集装箱船↔自动化堆场区的流程为:集装箱船↔自动化双小车岸边集装箱装卸桥↔IGV↔自动化集装箱轨道龙门吊↔自动化集装箱堆场。
2)集装箱船↔特殊箱区的流程为:集装箱船↔自动化双小车岸边集装箱装卸桥↔集装箱牵引半挂车↔自动化集装箱轨道龙门吊↔自动化集装箱堆场特殊箱区。
3)自动化集装箱堆场↔货主的流程为:自动化集装箱堆场↔自动化集装箱轨道龙门吊↔集装箱牵引半挂车(港外)↔港外。
针对以上生产流程特点,监控重点主要在码头前沿作业区和集装箱堆场区。码头前沿作业区监控范围,包括岸桥下方装卸车道、岸桥后方的缓冲区以及自动化平行运输设备行车道。对在非自动会车道作业的集卡、自动化车道、缓冲区和水平运输设备行车道作业的IGV,以及上述区域活动的辅助人员的操作情况实施实时监控。
集装箱堆场区监控又包括堆场大范围监控和车道监控,大范围监控主要输出堆场内箱区整体情况、集装箱流动情况、龙门吊运行情况,为调度中心管理人员全盘了解整个堆场生产情况提供画面支持。外集卡车道监控覆盖整条车道以掌握外集卡车道内车辆活动轨迹和运行、作业情况;U形车道堆场IGV车道监控重点为IGV在车道内的活动轨迹和作业情况。
2.2 区域和人员管控监控要点
针对码头四周围网、码头前沿自动化与非自动化车道分隔围网、堆场内外集卡车道与IGV车道分隔围网利用视频监控+智能分析技术进行管控,围网防入侵系统主要关注人员攀爬、越界等行为,防止人员进入管控区域。
堆场内U形外集卡车道监控应无盲区覆盖,尤其驾驶人员上下车一侧,对违规上下车、违规攀爬、翻越围网等行为进行全面监控。系统根据预先设定的多种行为特征和事件模式对防范区域或对象进行智能化的视频识别、分析,分析后自动弹窗提醒安保人员并提供报警防区画面,检测到报警后通过管理平台联动录像和调转周边球机或云台摄像机进行报警确认[3]。
周界防入侵监控系统除对违规行为报警外,还可联动智能广播系统,在防入侵管控区布置一定数量的室外扩音器,当周界防入侵系统探测到管控区有违规行为发生时,可通过中控室IP网络广播系统对指定区域进行喊话或播放预设报警声,以提示或驱逐违规闯入者。
3 摄像机安装位置及设备选型
码头前沿作业区监控摄像机宜采用球机,主要安装在两类位置:1)安装在岸桥轨间横梁和后伸横梁,以满足装卸车道近距离监控需要;2)安装于堆场海侧高杆灯或照明铁塔上,其安装高度不小于25 m,以满足前沿作业区大范围监控需求。
堆场大范围监控摄像机安装于堆场两端照明铁塔或高杆灯上,安装高度不小于25 m,摄像机可选用室外球机或云台摄像机,辅以增强现实(AR)全景拼接摄像机,提供3D实时画面,以实现高点大范围视频监控与低点精准监控画面联动。
堆场外集卡车道可选用枪机、球机或枪球联动一体机以覆盖通道,摄像机安装高度不宜超过8 m,可根据堆场照明灯杆布置安装于照明灯杆或摄像机立杆上。除了上述安装位置还可选择在龙门吊靠路侧适当位置设置球形摄像机,每纵列堆场有2台龙门吊,摄像机跟随其移动获取车道监控画面,作为定点监控的补充。
由于龙门吊在IGV车道一侧的装卸范围立杆安装空间受限,IGV车道监控主要依靠龙门吊门腿外侧位置摄像机,约560 m纵深堆场由两台龙门吊各覆盖280 m以监控整条IGV车道,见图3[4]。

注:①为3枪机+1球机;②为1球机;③为1枪机+1球机;④为4枪机;⑤为3枪机;⑥为3拼接枪机+7球机+全景摄像机;⑦为3枪机+7球机。图3 堆场摄像机典型布置
周界摄像机采用固定枪机结合球机的布置,固定枪机直线段间距一般不超过100 m,安装位置以高出围网50~100 mm为宜[5]。智能监控平台通过对摄像机信号实时分析、处理,实现违规入侵报警,并可联动云台摄像机或球机对报警区域违规行为进行确认。
4 结论
1)自动化集装箱码头装卸流程监控重点在于码头前沿作业区和堆场区作业监控,利用安装于岸桥、照明铁塔(高杆灯)、路灯、摄像机立杆、龙门吊门腿等位置的摄像机高、低点结合覆盖码头整个装卸作业过程。
2)利用智能分析+视频监控技术对区域分隔围网的违规攀爬和翻越、自动化区域内和外集卡车道的人员违规行为进行远程安防管控。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年5期)2022-04-02
现代电子技术(2022年3期)2022-02-16
卫星应用(2021年11期)2022-01-19
奇闻怪事(2018年9期)2018-09-28
集装箱化(2016年11期)2017-03-29
集装箱化(2014年12期)2015-01-06
集装箱化(2014年10期)2014-10-31
数码(2009年3期)2009-03-16
数码影像时代(2009年1期)2009-02-12