
堆垛导引集装箱吊具设计创新
2022-11-02 10:12张新杰
港口装卸 2022年5期
张新杰
上海振华重工(集团)股份有限公司
1 引言
在集装箱码头堆场内,能否快速、整齐地把集装箱堆垛在指定的位置决定着堆场的工作效率。运用传统吊具时需要人工判断堆垛集装箱的位置,易导致堆垛偏差,当堆垛集装箱的层数达到一定数量后,累积的偏差可导致整垛集装箱倾倒事故的发生[1]。若采用具备自动识别和扫描功能的设备,虽能有效地提高堆垛集装箱的精度,但需投入大量资金对码头的设备及基础设施进行更新或改造[2]。为此设计了堆垛导引集装箱吊具,不仅减少集装箱堆垛偏差,而且能减少自动化设备的投入。
2 堆垛导引工作原理
该吊具的堆垛导引功能是利用导板辅助着箱实现的。集装箱吊具抓取集装箱时,在接近集装箱顶的高度时,借助导板的力量集装箱吊具调整至集装箱正上方的位置,从而实现快速抓取集装箱的目的。当集装箱吊具堆垛集装箱时,将移动导板移动至集装箱的底部,借助导板将集装箱吊具和要堆放的集装箱拉至集装箱正上方的位置。该装置既能快速堆垛集装箱,又能减少堆放集装箱时产生的偏差。堆垛完成后,再把移动导板移动并锁定至集装箱吊具上,不影响集装箱吊具的正常伸缩功能。
3 堆垛导引机构组成
3.1 机械结构组成
堆垛导引集装箱吊具和普通集装箱吊具的不同是,在普通伸缩式集装箱吊具的左右两端增加了一套可以上下升降、内外摆动的堆垛导引机构。堆垛导引集装箱吊具由导向机构、卷绕机构、折臂机构和移动导板机构组成(见图1)。

1.导向机构 2.卷绕机构 3.移动导板机构 4.折臂机构图1 堆垛导引机构总图
导向机构是用于约束移动导板的导向装置,使移动导板只能上下移动。卷绕机构通过钢丝绳在卷筒上卷绕,驱动移动导板上下移动。折臂是集装箱吊具和移动导板之间的联络机构,折臂内有连接集装箱吊具和移动导板的电缆和液压油管。移动导板由2个固定导板通过横梁连接而成,是堆垛时和集装箱接触的机械机构。
移动导板在集装箱吊具上有2个位置,分别是8.0 ft和8.5 ft。移动导板在8.0 ft位置时,具有和普通集装箱吊具固定导板相同的功能,目的是方便集装箱吊具抓取集装箱。当移动导板处于8.5 ft时,集装箱吊具无导板功能,方便集装箱吊具维修和运输,防止集装箱吊具在移动时移动导板撞到其他设备造成移动导板损坏。在集装箱吊具端部转销机构的两侧,有用于固定移动导板的固定锁孔,当移动导板锁定在锁孔时,可防止移动导板因冲击而松动和掉落(见图2)。

1.8.0 ft位置锁孔 2.8.5 ft位置锁孔图2 移动导板固定锁孔
在堆垛导引集装箱吊具使用过程中,堆垛导引机构可根据吊具抓箱和堆箱的不同过程而调整移动导板的位置。当集装箱吊具要抓取集装箱时,把移动导板移动至8.0 ft的位置(见图3)。

图3 抓箱工作状态 图4 堆箱工作状态
而当集装箱吊具要堆垛集装箱时,在安全的位置只需要发出堆垛导引机构下降的命令,吊具两侧的移动导板会自动下降至集装箱箱底,并锁定在集装箱底角锁孔内(见图4)。同时吊具反馈集装箱高度信息和移动导板锁定状态信号给操作者及主机控制系统,参与主机的逻辑控制处理。
3.2 电气控制组成
堆垛导引机构上的电气控制元器件主要用于检测和测量各机构的位置、长度,以及实现减速和保护等功能。主要的电气元器件见表1,具体安装位置见图5~7。

表1 堆垛导引机构电气元器件一览表

1.液压马达 2.编码器图5 堆垛导引机构顶面

1.摆动油缸 2.校准限位 3.锁动油缸图6 堆垛导引机构侧面

1.箱底检测限位(发射) 2.箱底检测限位(接收) 3.减速限位 4.摄像头图7 移动导板
4 堆垛导引机构工作流程
堆垛导引机构要正常工作,首先必须要进行校准动作。校准动作是确定移动导板机构位置以及编码器初始数据的重要动作,是导板位置和高度计算的参考点。
4.1 校准流程
进行校准动作时,移动导板首先开锁、向外摆动后判断校准限位的状态。若校准限位处于接通(动作)状态,移动导板机构首先慢速下降,下降至校准限位断开(未动作)时停止,然后再慢速上升。当校准限位接通(动作)的瞬间,初始化编码器数值(导板的位置值为1 090 mm);移动导板继续慢速上升,当移动导板的位置为1 010 mm时上升动作停止。由于惯性原因移动导板会停止在1 000 mm左右的位置,这个位置就是8.0 ft锁孔的位置,移动导板向内摆动并锁定在8.0 ft锁孔内,完成校准动作。
在进行校准动作时,若校准限位处于断开(未动作)状态,则移动导板会开锁、向外摆动后慢速上升,移动导板后续的动作同校准动作导板向上动作的流程一致。导板校准动作的具体流程和动作见图8。

图8 导板校准动作流程图
4.2 导板下降高度值计算
完成校准动作后,移动导板的固定锁孔位置有了确切的高度位置数据。例如,8.0 ft固定锁孔的位置数据是1 000 mm;8.5 ft固定锁孔的位置数据是650 mm。集装箱在吊具闭锁并且悬空的情况下,从吊具8.0 ft锁孔中心位置到集装箱底角锁孔中心的高度值L可由式(1)计算得到。
L=c1+c2+h-c3
(1)
式中,c1为吊具8.0 ft锁孔中心到吊具端部转销箱底的距离,该距离由吊具机械结构决定,为100 mm;c2为抓箱后吊具端部转销箱底到集装箱上角配件上端面的距离,为15 mm;h为集装箱的高度;c3为集装箱箱底角配件锁孔中心到配件下表面的距离,为68 mm(见图9)。

图9 集装箱吊具8.0 ft锁孔到集装箱箱底高度示意图
计算出不同高度集装箱对应的吊具8.0 ft锁孔中心位置到集装箱箱底角配件锁孔中心的高度值和活动导板高度数值(见表2)。

表2 不同高度集装箱对应的高度数值
4.3 导板下降动作流程
当堆垛导引集装箱吊具完成抓箱动作后,需要把闭锁后的集装箱吊具提升至安全高度后才能发出导板下降指令。若吊具没有接收到下降完成信号,移动导板会先进行开锁动作,然后外摆,再根据编码器数据换算出的移动导板高度值,自行判断进行高速或低速下降。当感应到箱底限位时,切断导板下降动作后低速上升,直至箱底限位信号消失时停止。随后移动导板向内摆动并锁定在集装箱底角配件的锁孔内,根据当前移动导板的高度值,判断出当前集装箱的高度信息并发给主机。导板下降动作流程见图10。
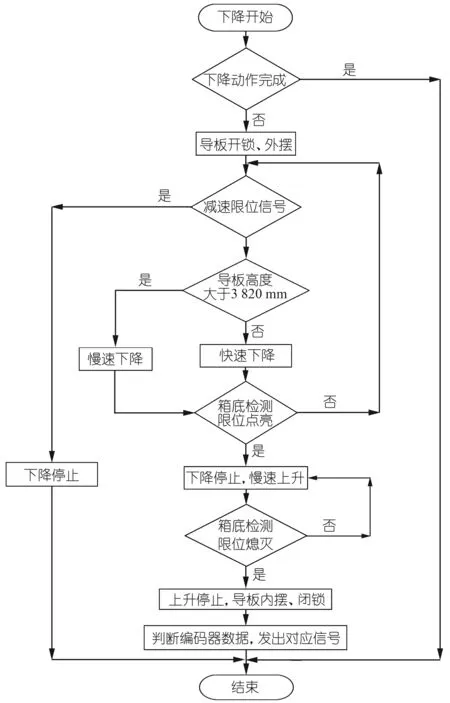
图10 导板下降动作流程图
减速限位在移动导板下降过程中,时刻检测移动导板下方(垂直)、集装箱长度方向(X)和集装箱宽度方向(Y)是否有障碍物。若有障碍物存在,立刻减速并停止移动导板下降动作,防止撞坏导板。
4.4 导板上升动作流程
当操作者接收到导板下降完成信号后,可以把集装箱吊具移动至要堆放位置的集装箱正上方。操作者下降主机起升高度至集装箱吊具发出着箱信号(完成集装箱堆垛)后,才能发出导板上升指令。此时移动导板会自动开锁,向外摆动后快速上升;当移动导板高度值小于1 300 mm时切换至低速上升。当到达8.0 ft停止位置后,停止上升动作,移动导板向内摆动并锁定,完成导板上升动作。导板上升动作默认活动导板上升至集装箱吊具8.0 ft锁孔的位置,方便堆垛导引集装箱吊具进行下一个集装箱的抓取。导板上升动作流程见图11。
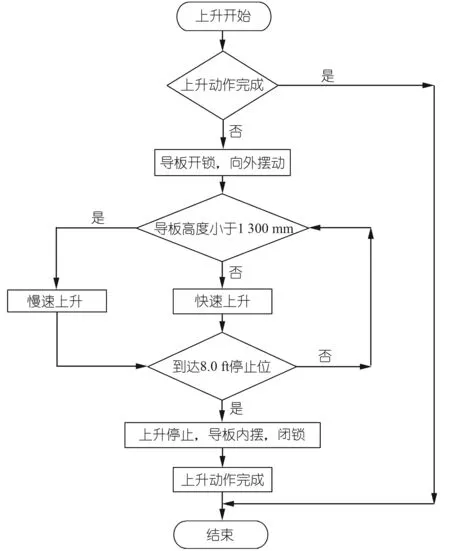
图11 导板上升动作流程图
上升动作完成后,将吊具开锁并提升至安全高度,进行下一个装卸作业流程。
5 结语
该堆垛导引集装箱吊具在香港HIT码头集装箱堆场、自动化集装箱室内仓储中得到大量应用,为快速堆垛集装箱、减少集装箱堆垛偏差提供了一套可行的解决方案。
猜你喜欢
物流技术与应用(2021年11期)2021-12-27
起重运输机械(2021年21期)2021-11-24
辽河(2019年4期)2019-04-30
制造业自动化(2018年10期)2018-11-02
专用汽车(2018年10期)2018-11-02
现代机械(2018年1期)2018-04-17
江南诗(2017年4期)2017-08-08
伴侣(2017年7期)2017-07-11
中国铸造装备与技术(2017年3期)2017-06-21
制造业自动化(2015年8期)2015-10-30
