
引信滚转姿态测量抗电机干扰补偿方法
2022-11-04 04:17李小平雷泷杰
探测与控制学报 2022年5期
陈 超,李小平,雷泷杰
(西安机电信息技术研究所,陕西 西安 710065)
0 引言
二维弹道修正引信是在常规引信基础上增加导航、制导、控制功能,实现弹丸轨迹修正,可显著提高打击精度,是一种实现常规弹药低成本精确打击的有效途径[1-2]。姿态测量模块是二维弹道修正引信的必要组成部件,常见的姿态测量原理包括太阳方位角法[3]、卫星定位天线测量法[4]、惯性测量法[5]、组合测量法[6-8]等。由于目前制导弹药多具备卫星定位弹道测量装置,可以充分利用卫星定位测速信息首先进行俯仰角和偏航角解算,然后再利用其他惯性器件组合进行滚转姿态测量,因此基于卫星定位与惯性测量组合的姿态测量方法被广泛采用,但应用中应根据实际工况对影响测量精度的因素进行识别和分析,提出相对应的补偿方法,以满足使用需要。
在某二维弹道修正引信中,采用卫星定位、磁传感器和陀螺组合测量滚转姿态,采用乒乓舵机进行引信滚转稳定控制。由于引信体积小,舵机和姿态测量模块相对位置较近,舵机由电机驱动,工作过程中的电机分布磁场对磁传感器的输出信号产生干扰,导致磁传感器信号失真,影响滚转姿态解算精度。
为了解决上述问题,提出一种二维弹道修正引信姿态测量模块抗电机干扰补偿方法。通过对舵机和姿态测量模块的应用工况分析,利用舵机位置开关提供的反馈信号识别舵机工作状态,在不同状态下分别进行补偿,以实现足够的滚转姿态测量精度。
1 滚转姿态测量原理与应用工况分析
1.1 滚转姿态测量原理
二维弹道修正引信修正组件相对弹丸整体减旋,采用卫星定位与磁传感器及陀螺组合测量引信滚转姿态,测量原理如图1所示。
图1 基于卫星定位与磁传感器及陀螺组合的引信滚转姿态测量原理Fig.1 The principle of fuze rolling attitude measurement based on the combination of satellite positioning, magnetic sensor and gyroscope
利用卫星定位装置测量的速度信息解算俯仰角和偏航角,如式(1)所示。
(1)
式(1)中,ϑ和φ分别为引信俯仰角和偏航角。
利用俯仰角、偏航角信息,结合当地磁场信息,通过磁传感器测量信号解算引信滚转角,如式(2)所示。

(2)
式(2)中,k1=-mxgsin ϑcosφ+mygcos ϑ+mzgsin ϑ sinφ;k2=mxgsinφ+mzgcosφ;mxg、myg、mzg为地磁场分量在引信坐标系三个方向上的投影;kzy为磁传感器Z轴和Y轴灵敏度之比;vy为磁传感器Y轴测量电压;vZ为磁传感器Z轴测量电压;ybias为磁传感器Y轴零偏;zbias为磁传感器Z轴零偏。
1.2 舵机工作对磁传感器的影响分析
乒乓舵机采用直线音圈电机进行驱动,音圈电机由定子磁芯和动子线圈构成。线圈在驱动电流的作用下,产生直线往复运动,线圈连接传动机构将直线运动转化为舵面转动,运动到位时,通过机械限位装置使舵面角度固定在所需位置;同时,为了识别舵机工作状态,设置位置开关,当舵面处于正向或反向极限位置时,对应的位置开关闭合,当舵面处于换向过程中时,位置开关断开。电机与磁传感器的相对位置关系如图2所示。
图2 电机与磁传感器的相对位置关系示意图Fig.2 Schematic diagram of relative position relationship between motor and magnetic sensor
电机产生的磁场主要包括两部分:一是定子磁芯产生的分布磁场,由于定子磁芯与磁传感器的相对位置关系固定,其产生的分布磁场对磁传感器的影响是固定的,可通过标定予以消除;二是动子线圈产生的磁场,由于线圈与磁传感器的相对位置关系不固定,且其分布磁场与线圈电流有关,因此需对应实际工况研究有针对性的补偿方法。由以上可知,电机工作时主要是对磁传感器信号产生干扰,对陀螺传感器没有影响。
2 抗电机干扰补偿方法
2.1 工作状态识别
根据第1章的应用工况分析,将电机的工作状态定义为静态和动态两种状态。静态定义为电机处于正向或反向极限位置时的状态,状态标识为对应的位置开关信号闭合;动态定义为电机处于换向过程中的状态,状态标识为位置开关断开。
2.2 静态状态下的补偿方法
2.2.1补偿策略
在静态状态下,电机线圈与磁传感器的相对位置关系固定,且线圈电流稳定,因此,线圈产生的分布磁场是可估量的。对于每发产品,可认为电机分布磁场的影响是在磁传感器输出信号电压上叠加了一个基本稳定但数值未知的直流偏置量,通过提前获取该偏置量,即可对磁传感器输出信号进行补偿。假设已获取以下四个偏置量:
Vyp、Vzp为舵面处于正向极限位置时对磁传感器y轴、z轴电压信号的产生的偏置;
Vyn、Vzn为舵面处于反向极限位置时对磁传感器y轴、z轴电压信号的产生的偏置。
则可以利用实际采集的磁传感器输出电压信号减去该偏置量,得到所需的地磁场测量信号,利用该信号带入式(2)进行滚转角解算。
2.2.2偏置量获取方法
为提升弹载适应性,采取发射后自主标定的方法获取电机分布磁场对磁传感器输出电压信号影响的偏置量,具体步骤如下:
1)驱动舵机正偏,引信正向转动0.5 s,采集磁传感器y轴和z轴输出电压信号;
2)驱动舵机反偏,引信反向转动0.5 s,采集磁传感器y轴和z轴输出电压信号;
3)舵机不工作,引信随弹丸自由旋转0.5 s,采集磁传感器y轴和z轴输出电压信号;
4)采用椭圆拟合方法计算步骤1)-3)中的磁传感器输出信号零偏[9];
5)利用式(3)计算所需的偏置量。
(3)
式(3)中,Vyp、Vzp为舵机正向极限位置磁传感器输出电压信号零偏;Vyn、Vzn为舵机反向极限位置磁传感器输出电压信号零偏;Vy0、Vz0为舵机不工作时磁传感器输出电压信号零偏。
2.3 动态状态下的补偿方法
在动态状态下,电机线圈与磁传感器间的相对位置关系连续改变,无法进行简单补偿,因此,摒弃磁传感器测量信号,采用不受干扰的陀螺测量得到的角速率值,通过与时间的积分计算当前滚转角数值。
令前一时刻t0的滚转角速率为ω0,滚转角为γ0,当前时刻t1测得的滚转角速率为ω1,则当前滚转角数值按如下公式计算:
(4)
2.4 补偿方法流程
通过本节的描述,总结姿态测量模块抗电机干扰补偿方法流程如图3所示。
图3 抗电机干扰补偿方法流程图Fig.3 Flow chart of anti motor interference compensation method
3 测试与验证
通过高精度转台对姿态测量装置的滚转角测量精度进行验证。测试时,将引信样机安装于转台,分别设置转台姿态为90°、180°、270°、360°,每种姿态停留5 s,在此期间,舵机随机换向,姿态测量装置进行姿态测量,存储磁传感器原始信号、补偿前的滚转角解算结果、补偿后的滚转角解算结果。回读数据,对比补偿前后的滚转角解算结果,如图4所示。统计每个角度的测量精度,如表1所示。
图4 补偿前后滚转角测试结果示意图Fig.4 Test results before and after compensation
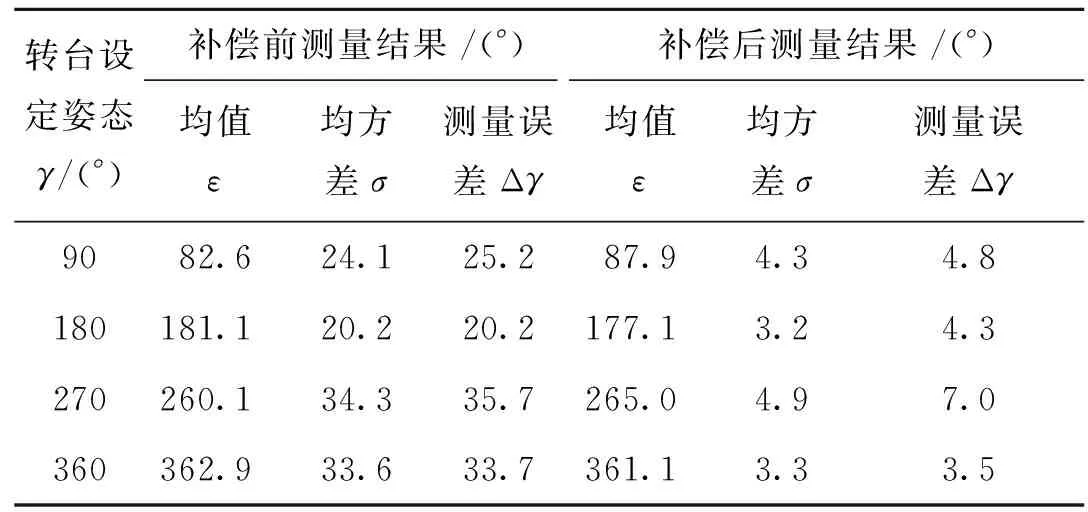
表1 滚转姿态测量结果统计表Tab.1 Roll attitude measurement results
由图4可以看出,通过采用补偿方法后,滚转角测量噪声得到明显抑制。通过表1可以看出,滚转角测量精度由补偿前的20°以上降低至7°以下,该方法效果明显。
4 结论
本文提出一种引信滚转姿态测量模块抗电机干扰补偿方法。该方法在弹丸发射后首先自主标定电机分布磁场对磁传感器信号的干扰偏置量,测量时利用舵机开关提供的位置反馈信号识别舵机“静态”和“动态”工作状态。在静态状态下,通过标定的干扰偏置量对磁传感器信号进行补偿,利用补偿后的磁测量信号解算滚转角;在动态状态下,通过陀螺测量的角速率与时间积分计算滚转角。利用高精度转台对补偿方法的有效性进行了验证,可显著降低测量误差。该方法已在二维弹道修正引信原型样机中开展应用,具有良好的适应性。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
电子制作(2017年13期)2017-12-15
解放军健康(2017年5期)2017-08-01
制造业自动化(2017年2期)2017-03-20
北京航空航天大学学报(2016年6期)2016-11-16
