
基于融合CNN 和MPA-SVM 的滚动轴承故障诊断
2022-11-08 07:14林珍莉曾宪文
上海电机学院学报 2022年5期
林珍莉, 曾宪文
(上海电机学院 电子信息学院, 上海 201306)
滚动轴承如果在机械运行[1]的时候发生故障,将严重影响正常的工作。因此,发现故障的原因,不仅是提高轴承稳健性的重要措施[2],也是保证工业机械设备正常运行的关键[3]。在滚动轴承的使用寿命中,其发生故障的原因多种多样,定时的检查和维修是非常耗费人力的。对于具有重要作用的轴承,定时维修是非常不科学的。因此,轴承检测和故障诊断技术[4]的研究和应用,受到研究学者越来越多的关注,成为故障诊断领域的研究热点,也是保障电机良好运行状况的重要措施[5]。
以往的轴承故障诊断多利用数据驱动的特征提取方式,需要提前对信号进行快速傅里叶变换、小波变换[6]、S变换[7]和经验模式分解[8]等处理,但会丢失重要的时域特征。常见的模式分类算法有支持向量机(Support Vector Machine,SVM)[9]、贝叶斯分类器以及最近邻分类器等。传统的故障诊断具有准确率不高、抗噪健壮性不强和难以解释等问题,被基于数据驱动和深度学习的故障诊断相结合的方法所取代[10]。在深度学习的基础上,吴春志等[11]提出了改进一维卷积神经网络(Convolutional Neural Network,CNN)的方法进行齿轮箱故障诊断,通过实验得出1维CNN 模型高于传统诊断模型。曲建岭等[12]提出了改进CNN 的滚动轴承自适应故障诊断算法,进一步提高了1维CNN 的准确率和泛化性。张弛[13]提出一种基于CNN 和SVM 的轴承故障诊断模型,该模型以原始振动信号为故障诊断的输入数据,准确率为96.7%。宫文峰等[14]为解决模型训练参数过多的问题,提出了一种在全连接层进行改进的CNN。
上述文献均是对CNN 网络结构进行优化。这些模型作为特征提取方法的参考,提高了一定的准确度,但泛化能力不高[15]。针对泛化能力不高等问题,本文提出了一种基于融合CNN 和海洋捕食者(Marine Predators Algorithm,MPA)优化SVM 的滚动轴承故障诊断方法。该方法只需输入原始数据,即可准确识别滚动轴承的故障种类,不需要复杂的模型和先验知识,具有更好的泛化能力和更高的准确率。
1 基本原理
本文提出的融合CNN 模型的结构由一维CNN特征提取子网络、二维CNN 特征提取子网络、特征汇聚层、2层全连接层和SVM 分类层构成。一维CNN 特征提取子网络包括第1输入层、第1卷积层、第1池化层、第2卷积层和第2池化层;二维CNN 特征提取子网络包括第2输入层、第3卷积层、第3池化层、第4卷积层和第4池化层;特征汇聚层分别与第2池化层和第4池化层连接,将池化层输出的特征进行融合后再输入到全连接层中,之后把特征信号输入SVM 中进行分类。融合CNN和MPA-SVM 的故障诊断模型结构如图1所示。
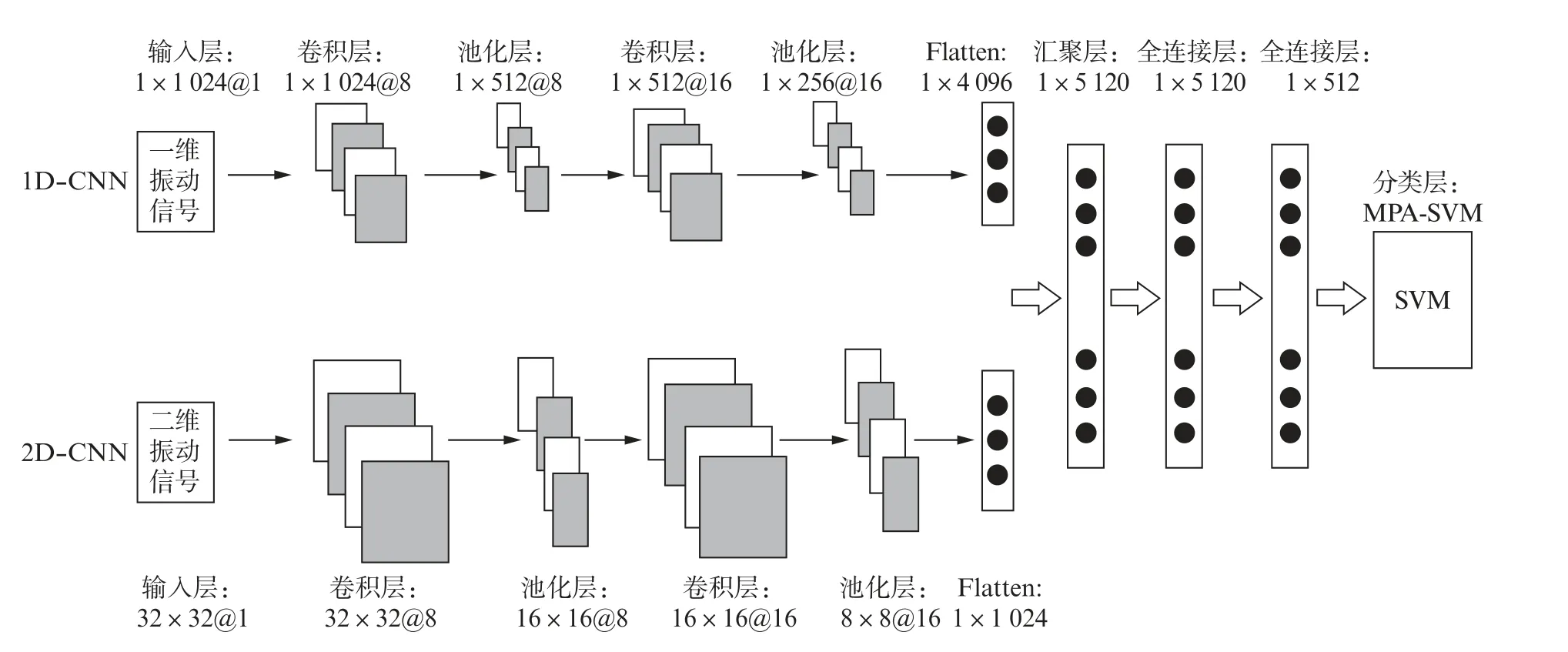
图1 融合CNN和MPA-SVM 的模型结构
在CNN前向传播中,为了减少参数和过拟合问题,选择用最大池化层来降低特征数据的维数,然后使用全连接层对特征进行拟合。在反向传播阶段,通过Adam 训练算法更新权重,获得全局最优解,从而使误差损失函数最小化。为了提高分类准确性,分别利用MPA、粒子群算法(Particle Swarm Optimization,PSO)和麻雀搜索算法(Sparrow Search Algorithm,SSA)对SVM 的核参数和惩罚因子进行优化。通过训练此模型,让核参数和惩罚因子达到最优值,经过对比找到最优算法。
2 基于融合CNN和SVM 的轴承故障诊断模型
相较于传统人为设计的特征提取方法,CNN可以提取轴承故障振动信号的更深层特征,一维卷积是滑动窗口在宽或高方向上的相乘、求和,常用于序列模型。二维卷积是在高和宽2个维度上同时进行,常用来处理图像数据。结合两者的优点,本文融合了1D-CNN 和2D-CNN,采用不同尺度的卷积核,对不同维数的输入信号进行卷积,卷积过程数学表达式为
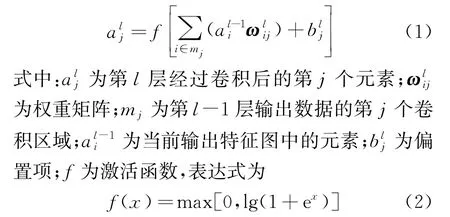
式中:max[]为最大值函数。
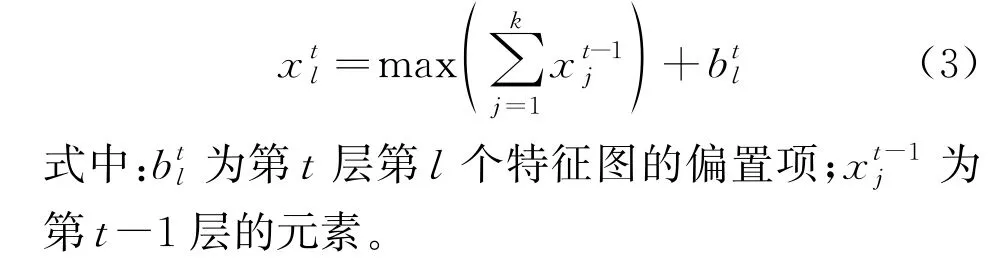
池化层是一种降采样过程,主要过滤掉冗余的信息,减小参数数量;同时加快计算速度,防止过度拟合。由于轴承振动信号易受噪声干扰,本文选取最大池化作为池化层,可表示为
特征图经过池化层的压缩、简化后,在汇聚层将两者池化层的输出连接成1个向量后,输入全连接层。全连接层主要用于对获取到的特征进行拟合,同时为了防止过拟合采用Dropout方法,减少中间特征的数量,增加每层各个特征的正交性。融合CNN的模型参数见表1。
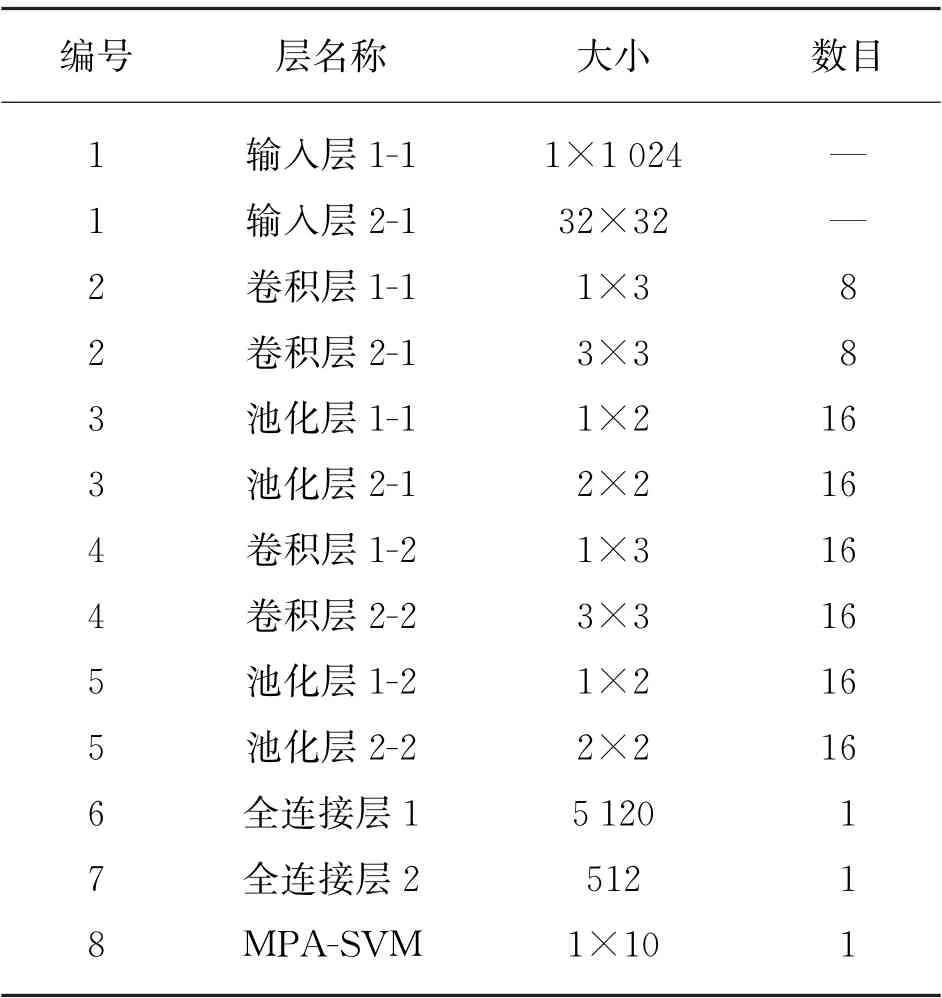
表1 融合CNN模型结构参数
3 基于MPA-SVM 的参数优化
SVM 是一种二分类模型,是特征空间中最大化间隔的线性分类器,在分类超平面的正负两边,各找到一个离分类超平面最近的点,使这2个点距离分类超平面的距离和最大。这些点离分界线越远越能更准确地对新数据进行分类,分类器更稳健。在SVM 中核参数的选取影响SVM 的性能,惩罚因子是分类准确性和模型复杂度之间的权衡,而核参数和惩罚因子的选取都是人工选取,带有一定的随机性和不精确性。MPA 是由Faramarzi等[16]在2020年提出来的,其灵感来源于MPA 觅食策略。MPA具有很强的寻优能力,相较于其他传统智能优化算法,MPA 的计算速度和精确度更高。为了提高分类的严谨性和精确度,本文选取MPA对SVM 的核参数与惩罚因子进行优化,从而对故障类型进行识别。
MPA优化过程分为3个主要阶段,考虑不同的速度比,同时模拟捕食者和猎物的整个生命周期。
(1) 发生在优化的迭代初期,此时全局搜索非常重要。此阶段捕食者采取的最佳策略就是维持当前位置,即

式中:S为此阶段的移动步长;RB为呈正态分布的布朗游走随机向量,维度是d;⊗为逐项乘法运算符,模拟了猎物的运动;A为常数,通常取为0.5;R为[0,1]内的随机均匀分布值;E为由顶级捕食者组成的精英矩阵;P为猎物矩阵。
(2) 此时猎物与捕食者都在寻找猎物,该策略发生在迭代中期,种群被分为2部分,其中猎物做莱维运动,负责算法在搜索空间内开发,捕食者做布朗运动,负责算法在搜索空间内探索。
前半部分种群跟新规则如下:
式中:RL由莱维分布组成,为莱维运动的随机向量;CF为捕食者移动步长的自适应参数。
(3) 发生在迭代后期,主要提高算法的局部开发,此时捕食者的最佳策略为莱维运动,即

在式(11)中,RL和E矩阵的点乘模拟了捕食者的莱维运动,因此捕食者的运动又被模拟为猎物位置的更新。其中利用MPA优化SVM 参数的步骤说明如下:
步骤1 设置海洋捕食者参数,初始化种群;
步骤2 设置SVM 需要优化的参数的取值范围,计算猎物矩阵适应度值,记录最优位置,计算出精英矩阵;
步骤3 捕食者根据迭代阶段,利用式(4)~式(11)选择对应的更新方式,更新捕食者位置。将训练SVM 得到的测试集和训练集的错误率值作为MPA的适应度值,计算适应度值,更新最优位置。若训练达到精度要求,将所得的参数作为SVM 的最优结构参数,否则返回到步骤3。采用最优参数测试SVM,得到轴承故障诊断的分类结果。
4 实验结果与分析
4.1 实验数据介绍
本文选用美国凯斯西储大学电气工程实验室的滚动轴承数据集,实验数据选取OHP下,采样频率为48 k Hz的驱动端数据,驱动端的尺寸又分为3类,即7、14、21μm,相对应每种尺寸下又可分为内圈、外圈和滚动体故障。再加上正常状态的轴承数据,本文可分为10种故障类型,故障类型见表2。
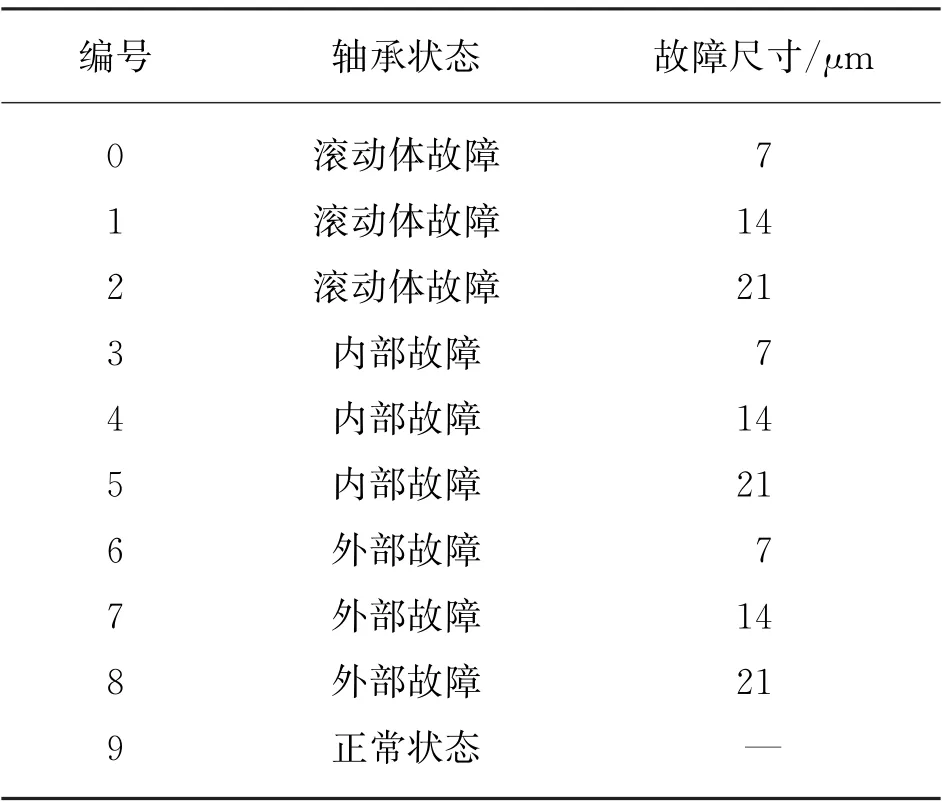
表2 实验样本数据集
本文选取1 024个采样点作为一组训练样本序列,每种类型选取1 000组训练样本,则共能得到10 000个样本。为了增加数据集的数量,增强模型的可行性,对原始数据进行重叠采样和删除冗余的数据,然后按8∶1∶1划分训练集、验证集和测试集。
4.2 特征提取可视化
利用融合CNN 提取每个故障样本的自适应故障特征。由于CNN 比较复杂无法可视化,为了展示模型的性能,使效果更加直观,本文采用TSNE技术对特征提取结果进行三维可视化。原始样本的分布如图2所示。通过融合CNN 提取特征后的10种样本有规律的聚在一起,如图3所示。通过对比,说明本文提出的模型效果更好。
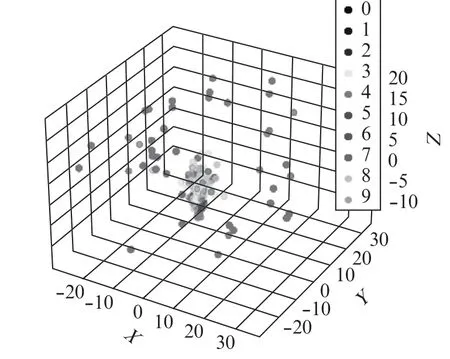
图2 原始数据可视化结果
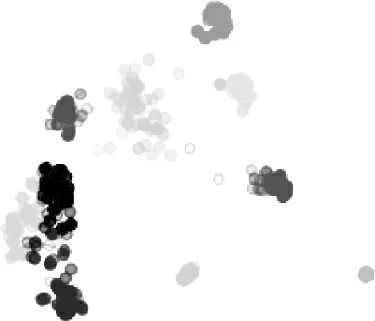
图3 融合CNN提取特征可视化结果
4.3 算法训练与评估
本文选择Google公司的Tensorflow 深度学习框架,搭建融合CNN和MPA-SVM 模型。对数据集进行训练,训练时的dropout为0.6,测试时为1.0。通过融合CNN,取FC层的输出作为故障特征信号,最后采用优化后的SVM 对采集到的特征进行分类。训练集和验证集输入融合CNN+MPA-SVM 模型,经100次迭代得到分类准确率和损失率曲线,结果如图4和图5所示。
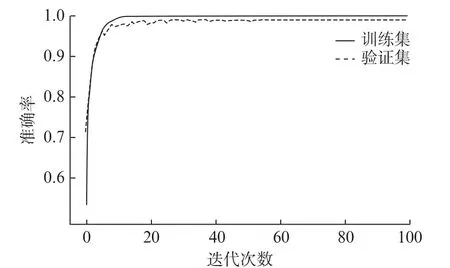
图4 融合CNN+MPA-SVM 分类准确率曲线
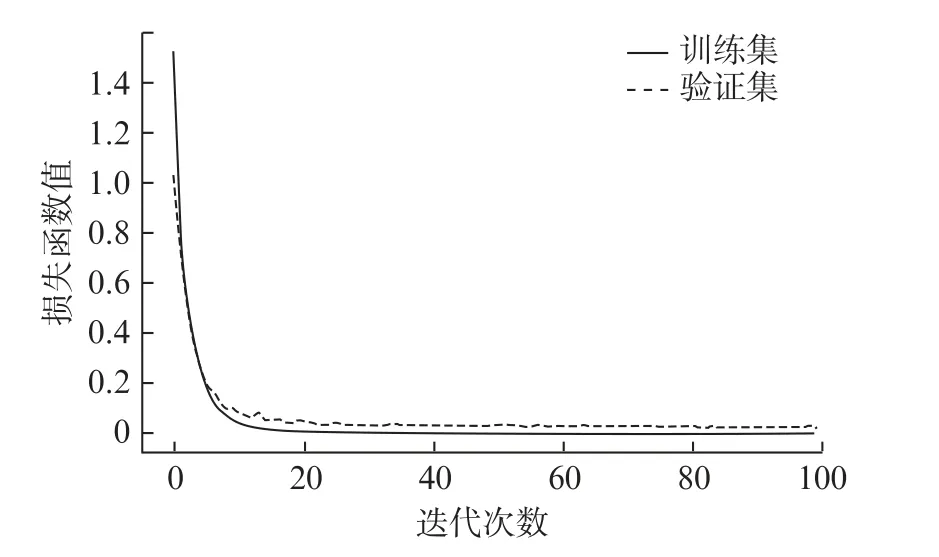
图5 融合CNN+MPA-SVM 损失率曲线
由图4和图5可知,经过20次迭代之后,模型验证集的识别准确率变换已经平稳且接近100%,损失函数接近于0。该模型识别结果的混淆矩阵如图6所示,对角线对应预测结果的精确度,颜色越黄说明预测分类的精确度越好。因此,本模型对轴承故障诊断具有很好的效果且精确度高。
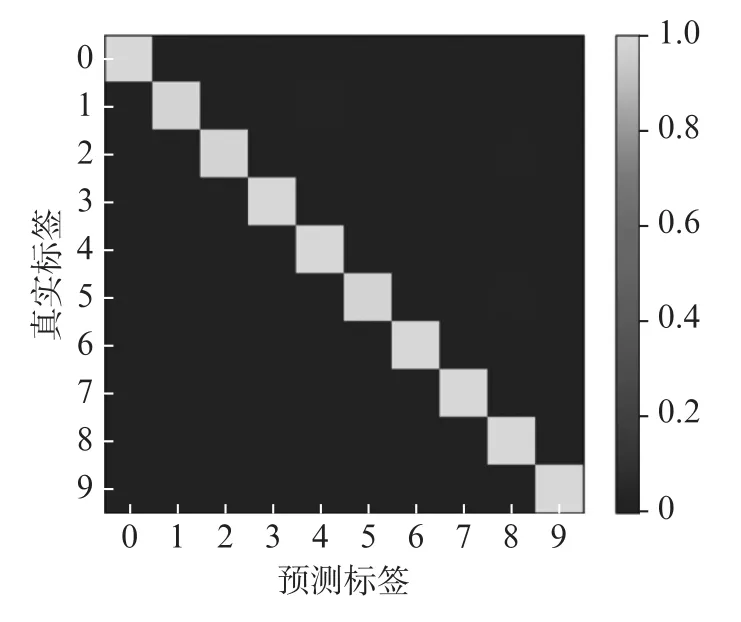
图6 融合CNN和MPA-SVM 模型分类结果混淆矩阵
4.4 故障诊断能力对比
对上述融合CNN 采集的特征进行分类,并以验证集的分类精度作为准确率函数,对4种分类方法进行比较,如图7所示。
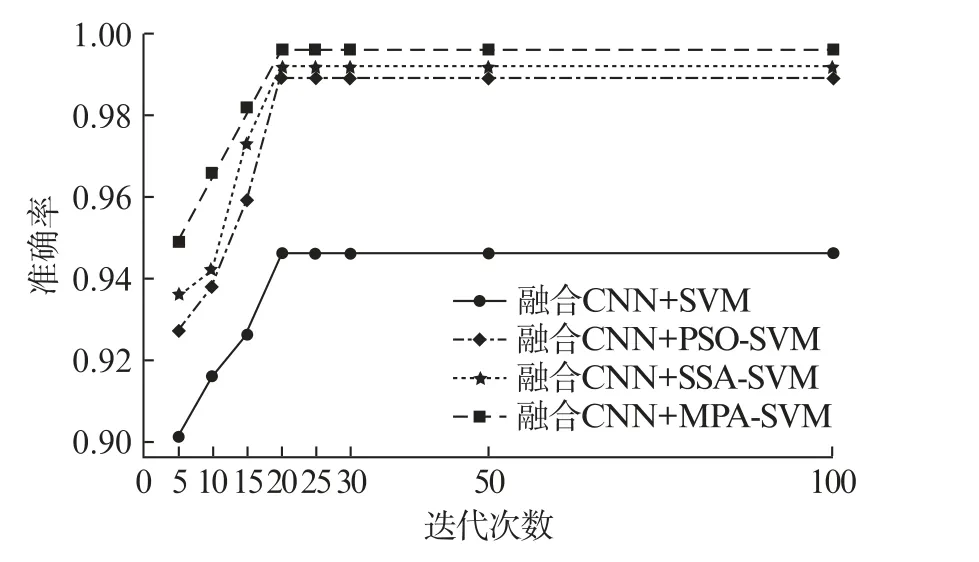
图7 模型测试集故障分类准确率对比
由图7可知,当迭代次数在20次左右时准确率趋于稳定,而融合CNN+SVM 的准确率最低。对比其他3种算法模型,融合CNN 和MPA-SVM的准确率和效果最好,此时验证集的准确率为99.6%,优化后的惩罚参数为107.999,核参数为0.121。说明优化SVM 的算法中MPA最好,证明了本文模型的优越性。
5 结 论
针对轴承故障诊断模型中细微故障特征提取困难、信息冗余、泛化效果不好和分类准确率低等问题,提出了一种基于融合CNN与MPA-SVM 的滚动轴承故障诊断方法,并通过仿真验证了其有效性,得到以下结论:
(1) 利用一维CNN 和二维CNN 各自的特点融合在一起,对滚动轴承振动信号进行特征提取,并利用SVM 进行分类,能够使模型发挥更大的识别价值;
(2) 新型MPA算法优化SVM 的核参数和惩罚因子,可以避免训练时间过长或参数不合适而提高了分类准确率;
(3) 本文所构建的融合CNN 和MPA-SVM轴承故障诊断模型相较于其他3种,方法识别率最高。同时也发现CNN 模型训练参数多,数据质量不好。接下来可以在优化和减少参数量上对CNN进行研究,使诊断模型更加完美。
猜你喜欢
数学物理学报(2021年6期)2021-12-21
科技创新与应用(2021年23期)2021-08-30
无线互联科技(2020年15期)2020-11-10
科技传播(2020年6期)2020-05-25
数学物理学报(2018年5期)2018-11-16
电子制作(2018年19期)2018-11-14
太原师范学院学报(自然科学版)(2018年2期)2018-08-17
雷达科学与技术(2018年3期)2018-07-18
自动化学报(2017年11期)2017-04-04
中外文摘(2016年13期)2016-08-29
