
基于螺旋理论的3D打印并联解耦机构综述
2022-11-10 02:44战丽娜赵楠肖淑斌
科技资讯 2022年22期
战丽娜 赵楠 肖淑斌
(湖南水利水电职业技术学院 湖南长沙 410131)
3D 打印机工作时,执行机构应具备3 个空间的平移自由度。现有的3D 打印机多采用串联机器人机构(见图1),虽然短程送丝,打印空间大,但是普遍出现制造成本高、精度差、速度低、步进电机使用寿命短、系统稳定性差以及控制困难等问题;后出现了采用Delta并联机器人机构的并联式3D 打印机(见图2),只有打印喷头可以移动,三轴精度统一,打印速度相当于串联打印机的两倍,但是空间利用率低,又由于Delta 机构本身为耦合并联机构,三轴互相影响,打印机调试难度比串联打印机要高好几倍,且在高速运行下,打印喷头的稳定性和水平刚度较差。

图1 串联式3D打印机
该文从组成3D 打印机的最基本要素——机构选型与设计为出发点,力图改善打印精度、速度和效率等瓶颈问题,同时降低制造成本、简化控制,为推进3D打印机技术的完善提供参考。
1 3D打印机执行机构输出运动形式分析及机构构型设想
1.1 3D打印机执行机构输出运动形式分析
串联式3D 打印机(如图1 所示)执行机构的输出运动形式有两种:一种是打印喷头进行X 方向的左右平移和Y 方向的前后平移,工作台进行Z 方向的上下平移;另一种是工作台进行X方向的左右平移,打印喷头进行Y 方向的前后平移和Z 方向的上下平移(或者是工作台进行Y 方向的前后平移,打印喷头进行X 方向的左右平移和Z方向的上下平移)。并联式3D打印机(如图2 所示)执行机构的输出运动形式只有一种:即工作台固定不动,打印喷头可进行空间X、Y、Z 这3个方向的平移。
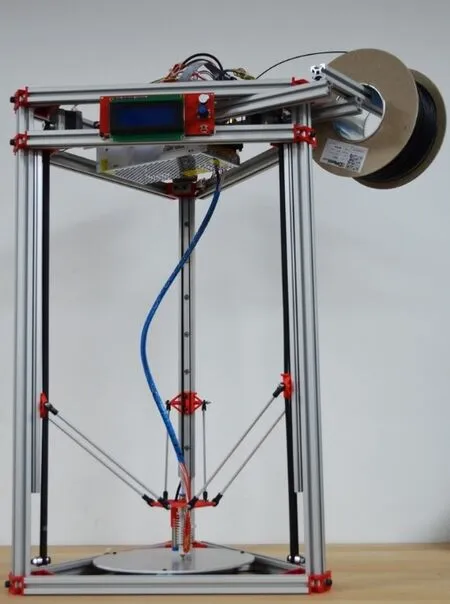
图2 Delta并联式3D打印机
1.2 3D打印机机构构型设想
机构结构设计是3D 打印机中既重要又复杂的工作,其直接决定着3D打印机的打印成本、速度、精度以及控制性能等。
与传统的串联式3D打印机(如图1所示)相比,并联式3D打印机的工作空间较小,而且并联机构为多支链闭环方式,以结构紧凑、速度高、精度高、刚度大、累积误差影响小和运动惯性小等特点而著称,因此,并联式3D 打印机更有优势,所以设计的3D 打印机机械本体新构型一方面要保持现有并联式打印机的优点,另一方面要克服其缺点。
除此之外,少自由度解耦并联机构具有结构简单、控制容易和制造成本低等优点;解耦并联机构不仅具备并联机构的结构紧凑、高精度、高强度、高承载能力、动态性能好、逆向运动学求解简单等优点,而且因为解耦使机构分支之间相互独立,所以还具有理论分析难度大幅降低、控制和装配更方便、运动精度和设计任务更容易保证等独特优势[1]。比如:孟令威就曾设计出三移两转混联解耦机构应用在悬臂式3D打印机上[2]。
将三自由度移动解耦并联机构或者二自由度移动解耦并联机构融合打印机机身作为3D 打印机的机械本体,恰好可以满足3D打印工作所要求的空间X、Y、Z这3个方向移动的自由度特征,符合客观事实,既具有串联式3D打印机各轴解耦的优点,又具备并联式打印机精度高的优点,同时弥补了Delta 并联式3D 打印机(如图2所示)由于三轴耦合造成的调试困难的缺点。
因此,以三自由度移动解耦并联机构或者二自由度移动解耦并联机构作为3D打印机的机构新构型,能改善现有3D 打印机普遍存在的精度、速度、控制困难等问题,并具备降低制造成本以及简化控制过程的条件,是实现3D打印解耦并联机器人设备研制的一个重要研究方向,对革新3D 打印技术设计理念、改进其性能具有重要意义和价值。
2 解耦并联式3D打印机执行机构新构型综述
并联机构的新构型已经有很多人做过研究,例如:曹毅等综合出具有两条连续确定转轴的PRR 型并联机构[3];李永泉等综合出基于图谱法的3 平移并联机构[4];李云朋综合出末端为2R2T 的含两层并联机构的混联机构构[5];刘伟等综合出具有2T1R与2R1T运动模式的3自由度并联机构[6];王华明综合出具有三转动的少自由度广义解耦并联机构[7];陈海等综合出基于螺旋理论的2T2R 完全解耦并联机构[8];常威综合出一系列移动解耦并联机构[9],等等。下面将以螺旋理论为基础来阐述解耦并联式3D 打印执行机构的新构型过程。
2.1 螺旋理论
对解耦并联式3D打印机执行机构进行新构型,须以螺旋理论[8]为基础。螺旋又称旋量,既可表示空间的一组对偶矢量,又可同时表示矢量的方向和位置、运动学中的角速度和线速度、刚体力学中的力和力偶等,每个螺旋都含有6个标量。对于空间的两点A和B,用螺旋来表示直线AB,具体如下。

式中,S为直线AB在空间直角坐标系中的有向矢量,当S·S0=0 时,$表示同一线矢;当S·S0≠0 时,$表示旋量。
在并联机构中,当以$表示刚体的运动时,称之为运动螺旋。刚体的移动副可看成是一个瞬时转动,转动轴线与S正交,并位于距S无穷远的平面内,此时,移动副可用螺旋表示为:

式中,0是一个1×3的零矢量。
由分析可知,对具有3个自由度的并联机构,可以用3 个线性无关的运动螺旋来表示它能实现的运动,这3 个运动螺旋组成该并联机构的运动螺旋系,并称为该螺旋系的一组基。而该并联机构的约束螺旋指的是与运动螺旋系中所有运动螺旋都互逆的螺旋,它表示该机构被约束的运动,该并联机构的约束螺旋系由所有线性独立的约束螺旋构成,因此,三自由度并联机构的约束螺旋系由3个线性独立的约束螺旋构成。同理:对具有2 个自由度的并联机构,可以用2 个线性无关的运动螺旋来表示它能实现的运动,这2 个运动螺旋组成该并联机构的运动螺旋系,并称为该螺旋系的一组基,且二自由度并联机构的约束螺旋系由2 个线性独立的约束螺旋构成。
2.2 3D打印解耦并联机构新构型流程
根据约束螺旋型综合法[9]和并联机构的转动条件[9]可知,并联机构的运动平台的约束螺旋是各个分支约束螺旋的并集,则该并联机构的运动平台的运动螺旋系是所有分支运动螺旋系的交集;由于移动并联机构运动平台所能实现的运动是所有分支所能实现移动的交集。因此,根据移动解耦并联机构分支输入副选择准则[9]和移动解耦并联机构分支运动副的配置原则[9]以及并联机构移动自由度实现条件[9],可综合出可以实现连续运动的3D打印移动解耦并联机构新构型,其新构型的构型流程是:根据3D打印机构给定的自由度列出3D打印机构所有的分支类型,基于螺旋理论列出各分支运动螺旋系,根据并联机构的转动条件确定各分支驱动方向和驱动副的类型,根据移动解耦并联机构分支输入副选择准则和移动解耦并联机构分支运动副的配置原则综合各分支类型,进而综合出各分支运动链,根据3D 打印机构需要满足的自由度确定3D打印解耦并联机构的分支一,再根据并联机构移动自由度的实现条件确定3D 打印解耦并联机构的其它分支,剔除瞬时性机构后,得到期望的3D 打印解耦并联机构,如图3所示。
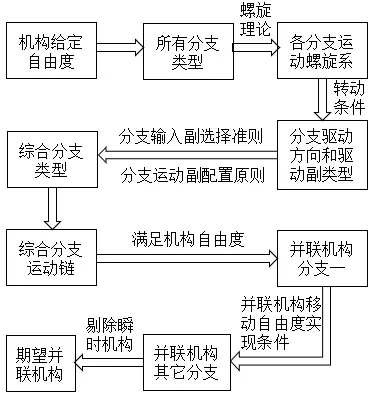
图3 3D打印解耦并联机构新构型流程
2.3 3D打印解耦并联机构综述
2.3.1 三自由度移动解耦并联机构新构型
根据3D打印机执行机构的输出运动特性,可以综合出一种三自由度移动解耦并联机构,该机构应具有三分支,且分支中不具有闭环的三自由度。因为移动解耦并联机构运动平台所能实现的移动为3个分支所能实现移动的交集,所期待的自由度是3,所以,机构的分支类型都能作为X、Y、Z 轴方向的驱动。任意选择一类分支作为分支一,只需根据并联机构移动自由度的实现条件来确定分支二类型和分支三的类型。为了使三自由度移动解耦并联机构的3个分支不满足转动条件,该并联机构的3 个分支不能同时具有同一方向的转动。图4所示的就是其中一种3-CPP三自由度移动解耦并联机构。

图4 3-CPP三自由度解耦并联机构
2.3.2 二自由度移动解耦并联机构新构型
根据3D打印机执行机构的输出运动特性,可以综合出一种二自由度移动解耦并联机构,该机构融合打印机机身实现三个方向上的平移自由度,该机构应具有两分支,且分支中不具有闭环的二自由度。因为移动解耦并联机构运动平台所能实现的移动为二个分支所能实现移动的交集,所期待的自由度是2,再与3D打印机本身的Z轴方向的移动相配合,所以,机构的分支类型可以作为X轴和Y轴方向的驱动。任意选择一类分支作为分支一,只需根据并联机构移动自由度的实现条件来确定分支二类型。为了使二自由度移动解耦并联机构的二个分支不满足转动条件,该并联机构的二个分支不能同时具有同一方向的转动。图5所示的就是其中一种PRRR-PRR 二自由度移动解耦并联机构。
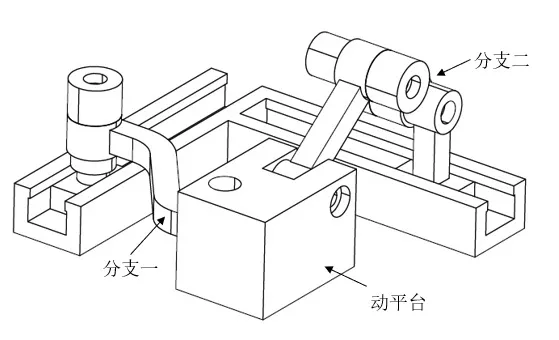
图5 PRRR-PRR二自由度解耦并联机构
3 结论
(1)分析串、并联3D 打印机执行机构输出运动形式,提出将移动解耦并联机构作为3D打印机的机械本体机构,拓展3D打印机机构新构型。
(2)以螺旋理论为理论依据,根据约束螺旋型综合法、并联机构的转动条件、并联机构移动自由度的实现条件、移动解耦并联机构分支输入副的选择准则以及移动解耦并联机构分支运动副的配置原则,总结了3D打印解耦并联机构的新构型流程,并综合出一种3-CPP三自由度移动解耦并联机构和一种PRRR-PRR二自由度移动解耦并联机构,为高性能3D打印机构的开发提供技术支撑,对于机构学理论的拓展和3D打印技术工程实践均具有重要的科学意义和实用价值。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
军民两用技术与产品(2022年1期)2022-06-01
汽车工程学报(2021年3期)2021-06-16
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
中学课程辅导·高考版(2020年9期)2020-10-20
电机与控制学报(2018年9期)2018-05-14
中国高新技术企业(2015年17期)2015-05-18
