固液分离转子参数化设计与分析
2022-11-10 09:59董云龙戚厚军张昭
装备制造技术 2022年8期
董云龙,戚厚军,张昭
(1.天津职业技术师范大学 机械工程学院,天津 300222;2.天津市高速切削与精密加工重点实验室,天津 300222)
0 引言
固液分离设备是一种可以实现粪便污水混合物固液分离的机械,由齿轮带动轴上的圆弧形转子同旋向无缝啮合,通过连续的同向旋转并挤压脱水,将混合物由进口送至出口。圆弧型转子廓线对提高固液分离设备的脱水率以及连续运转效率和处理能力影响很大,因此圆弧形转子廓线的合理设计至关重要。由于转子旋向相同且要求无缝啮合,所以,在设计仿真中发现椭圆弧型转子和渐开线型转子均无法满足工程的需要[1]。本研究使用几何法图解建立可圆弧型转子的廓线方程,避免了复杂的设计过程。使用MATLAB软件编程,得到轮廓曲线参数,再将所得数据导入Solidworks进行参数化建模[2],快速得到转子的三维模型,并通过仿真验证廓型满足工程需求,为实际加工生产提供了一种新的设计方法。
1 圆弧型转子型线基础理论
1.1 转子廓线数学模型
圆弧型转子设计计算中所采用的坐标系如图1所示,其中O1x1y1为左转子的动坐标系,O2x2y2为右转子的动坐标系,O1X1Y1为左转子的静坐标系,O2X2Y2为右转子的静坐标系。μ为动坐标系O1x1y1和动坐标系O2x2y2所转过的角度,rad;ω为动坐标系O1x1y1和动坐标系O2x2y2旋转的角速度,rad/s。
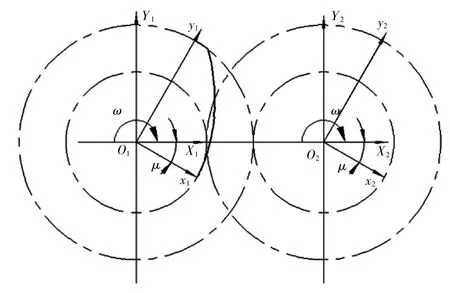
图1 圆弧型转子坐标系
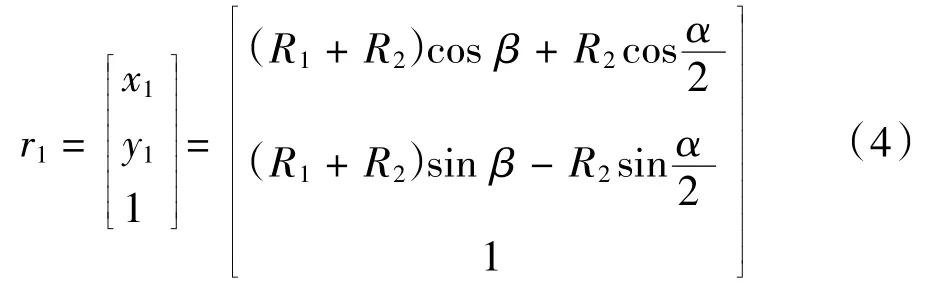
圆弧型转子由8段圆弧拼接而成,在坐标系Oxy中,其中BC、FG两段弧同属于一个短轴圆,圆心位于点O点,半径为R1,mm;AH、DE两段弧同属于一个长轴圆,圆心位于O点,半径为R2,mm;AB、CD、EF、GH四段圆弧属于半径相同但圆心点不同的4个圆,半径为R1+R2,圆心位于长轴圆上,同时这4个圆均短轴圆相切;β为圆弧GH段在以圆心为原点的直角坐标系O'x'y'中所对应的圆心角的角度,rad。圆弧型转子示意图如图2所示。

图2 圆弧型转子示意图
短轴圆半径与长轴圆半径关系为:

圆心角求解公式:

角度β的取值范围为:

圆弧型转子在同向旋转时,每一对互相啮合的转子之间均保持90°的相位差旋转,即每个转子的短轴圆弧与另一个转子的长轴圆弧进行啮合,两个圆弧型转子的啮合如图3所示。α为弧BC所对的圆心角,θ为弧AH所对的圆心角,α=θ,rad。
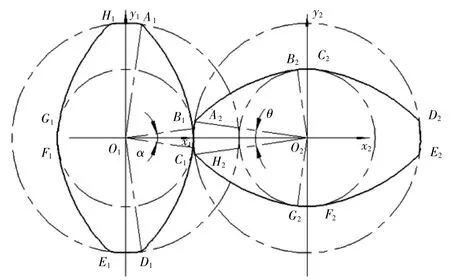
图3 两个圆弧型转子啮合
圆弧GH段的型线方程可表示为:
圆弧型转子的运动轨迹如图4所示。验证了转子啮合的正确性。
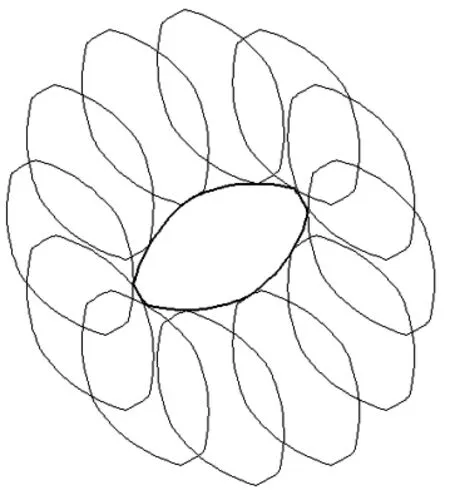
图4 转子的运动轨迹
1.2 转子顶切分析
构造临界无缝啮合圆弧半径关系方程,求解长轴圆半径R2与圆心角α。
图5为转子的顶切,发生顶切的两个转子会在啮合过程中相互碰撞,最终会将顶角吃掉,导致转子间产生间隙,降低工作效率,因此要避免发生顶切。

图5 转子顶切
通过构建临界啮合图解,建立求解R2的方程组,通过循环求解程序求解所需参数。当满足以下四个条件时,所设计转子在任意角度时均无缝啮合。

转子转角的取值范围为:

当确定R1后,将取值范围内的φ值循环代入(8)求解α和R2,得到无顶切的转子模型参数。
2 转子轮廓曲线的绘制程序设计
MATLAB包含了大量计算算法,拥有工程中要用到的很多数学运算函数,能够很方便的满足用户所需功能[3]。它的这些函数集包括从最基本的函数到复杂的函数,例如矩阵,特征向量、快速傅立叶变换等[4]。
基于MATLAB设计了圆弧型转子理论廓线的设计程序。步骤如下:
(1)输入转子的初始参数短轴半径R1,将φ值代入循环,根据式(5)和式(6)得到α和R2。
(2)代入式(7)和式(1)分别验证α和R2是否在取值范围内,若在则可以设计出对应的无缝啮合转子,若不在则对应的R1不存在对应的转子,根据式(3)确定角度β的取值范围。
(3)将所得参数代入各段轨迹线方程中,得到各段对应的轨迹线,将其表示在坐标系中,得到转子的整体外轮廓轨迹线[5]。
根据轮廓曲线绘制流程,编制对应的MATLAB程序,运行即可得到对应的转子理论廓线,如图6所示。

图6 转子轮廓曲线
3 转子的实体建模
将转子的轮廓曲线程序保存为.m文件,在MATLAB中运行该程序,依靠MATLAB强大的数学能力计算出轮廓曲线上的坐标点[6],通过编程生成符合SolidWorks需要的.txt文件,再导入SolidWorks中实现转子的三维实体建模[7]。
应用SolidWorks中的曲线工具,可以通过各点的XYZ坐标清单生成需要的样条曲线[8]。在软件菜单选项中选择插入曲线,选择通过XYZ点的曲线,导入之前修改好的.txt坐标文件,即可生成需要的转子外轮廓曲线[9]。此时需要将得到的廓线转换为实体线才能进行拉伸。利用SolidWorks中的转换实体引用命令将外轮廓曲线转变为实体线,然后将生成的外轮廓曲线通过草图拉伸得到转子的三维模型,如图7所示。
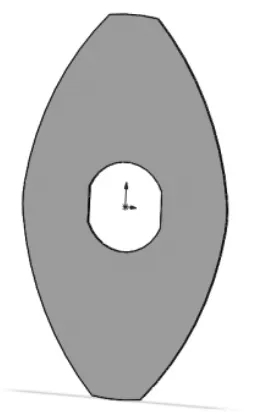
图7 圆弧型转子三维模型
4 转子的模态分析
模态分析时,根据有无约束可以分为自由模态和约束模态,通过ABAQUS软件进行模态分析。首先将Solidworks建立的三维模型另存为.x_t格式,将其导入到ABAQUS中添加属性、设置分析步、添加约束和划分网格,然后对其进行有限元分析[10]。转子使用的材料为304不锈钢板,即0Cr18Ni9,其材料密度为7.93 g/cm3,杨氏模量为204000 MPa,泊松比为0.285。考虑转子的实际工作情况,在内孔与轴的接触面上施加固定约束,求解在约束条件下的固有频率。网格划分采用六面体为主的扫掠网格,进阶算法,单元类型为C3D8R,共809个单元。在分析步中选前10阶模态进行计算。从理论上来说求解的固有频率可以有无限阶,但是只有前几阶的参考意义较大,高阶的实际意义很小,因此本节只取转子的前6阶固有频率和振型进行分析,见表1。
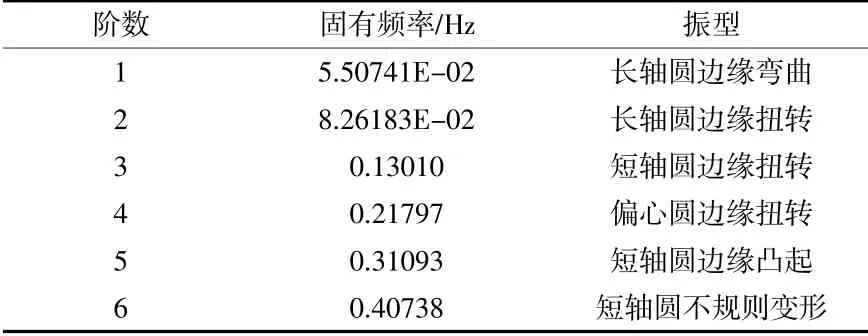
表1 转子前6阶固有频率和振型
通过有限元模拟,建立了圆弧型转子的三维有限元模型,并对其进行模态分析,得到圆弧型转子的前六阶固有频率和振型。由于圆弧型转子的前六阶固有频率很低,所以器件在高频工作环境中不会产生共振,在低频工作环境中要避免出现这几阶固有频率。且由于轴孔部分施加约束,圆弧型转子在发生振动时,轴孔附近振幅变化不大,而转子边缘工作部分容易发生变形,与实际工况相符。通过模态分析得出在实际装配中有三点要注意:一要保证转子片在工作过程中被垫片压紧,即始终垂直于轴,避免发生倾斜;二转子与轴配合的轴孔设计公差配合尽可能选择过渡配合或过盈配合,以避免转子在轴上发生松动,导致产生振动,缩减使用寿命;三垫片的尺寸在保证正常运转的情况下要尽可能大,避免发生振动时转子产生大面积变形。
5 结语
基于几何图解法,以这种直观的推导方式得到了圆弧型转子的各段外轮廓曲线方程,且通过分析无顶切转子的临界啮合条件,得出了转子的设计的关键参数,利用MATLAB语言编程生成数据点,导入Solidworks建模,实现了转子的三维实体建模,将两种软件相结合,快速便捷得到了转子的廓型,实现参数化设计。并利用ABAQUS对转子进行模态分析,验证了转子设计的合理性,并为转子的优化设计奠定基础,且通过分析结果,对转子的设计、制造和安装提出了指导性的意见。该方法通俗易懂,便于应用,为机构设计及优化设计提供了一种新思路。
猜你喜欢
机械传动(2022年10期)2022-10-21
建材发展导向(2022年4期)2022-03-16
天津理工大学学报(2021年1期)2021-02-25
武汉工程大学学报(2019年6期)2020-01-03
时代英语·高一(2019年5期)2019-09-03
学苑创造·B版(2019年4期)2019-05-09
知识文库(2018年7期)2018-05-14
客车技术与研究(2014年3期)2014-03-20
计算机辅助工程(2012年5期)2012-11-21
大灰狼(2009年7期)2009-08-26