坐姿可调节轮椅结构设计与分析
2022-11-10 10:01杨帅旗王丙旭杨景赵德明高兴文
装备制造技术 2022年8期
杨帅旗,王丙旭,杨景,赵德明,高兴文
(浙江理工大学 机械与自动控制学院,浙江 杭州 310018)
0 引言
近年来,我国瘫痪患者人数逐年增加,据2019年“脑卒中高危人群筛查和干预项目”数据显示,2012年至2019年我国40岁及以上人群的卒中人口标化患病率由1.89%上升至2.58%,我国2019年40岁及以上患过脑卒中的人数约为1704万。在脑卒中幸存者中,约75%的患者会留有后遗症,偏瘫最为常见[1-3]。此外,失能老人人数也在逐年增加,据全国老龄委数据统计,2020年我国60岁以上失能老人已超过4200万[4]。这导致辅助性工具的需求量日益上涨,如轮椅、拐杖、助行器等,据市场数据显示,轮椅是上述人群首要的日常辅助性工具[5]。
人体长期处于坐或仰卧的姿势会引起疲劳,不利于血液流通和代谢,尤其对于四肢失能人士,几乎一直处于同一姿态,极易产生麻木和不适的感觉[6-8]。此外人体长期保持同一坐姿也会引起压疮的产生,压疮一旦发生将会严重降低瘫痪患者的生活质量[9-11]。针对此问题,基于普通轮椅的结构基础并进行了改进,设计了一种坐姿可调节轮椅。
1 工作原理
坐姿可调节轮椅的创新功能在于可调节使用者的坐姿,通过轮椅折叠机构、俯仰调节机构、坐垫调节机构、靠背调节机构协同工作实现。轮椅折叠机构用于调节靠腿与坐垫、靠背与坐垫间的角度;俯仰调节机构用于调节坐垫与水平面的角度;坐垫调节机构和靠背调节机构用于调节人体在轮椅上的坐姿。工作模式分为手动和自动两种,手动模式通过控制面板上的钮子开关操纵单个机构,比如可单独调节靠背角度、靠腿角度等,自动模式为各个机构按照设定程序调节轮椅整体姿态,图1为坐姿可调节轮椅的部分形态。
2 结构设计
坐姿可调节轮椅由轮椅折叠机构、轮椅俯仰调节机构、坐垫调节机构、靠背调节机构、车架、车轮等机构部件组成,轮椅结构如图2所示。
平移调节机构,如图3所示。其主体为丝杆螺母传动机构。导轨用于导向和承受正压力,42步进电机和旋转控制电机运行。坐垫调节机构由两个平移调节机构和坐垫构成,两个坐垫调节机构并排平行安装,相向移动,转动使用者的臀部;靠背调节机构由平移调节机构和靠背构成,靠背左右移动,调节背部位置,两部分协同工作。
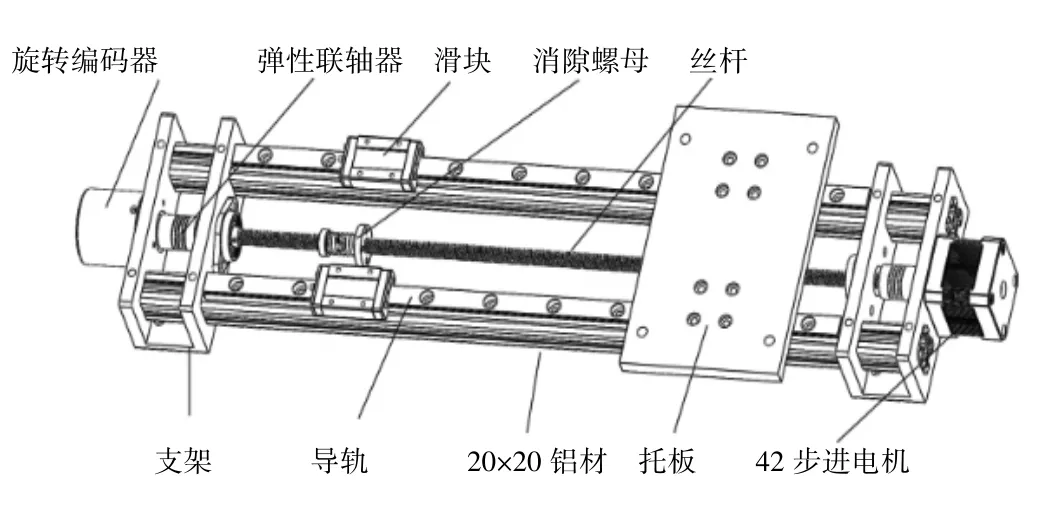
图3 平移调节机构
如图4,轮椅折叠机构,靠背安装板和靠腿安装板分别与坐垫安装板连接,均可相对于坐垫安装板转动,依靠坐垫两侧和下侧的双作用液压缸实现靠背和靠腿相对于坐垫角度的调节。轮椅俯仰调节机构中,液压缸活塞杆推动坐垫调节杆转动,使坐垫上移或下移。
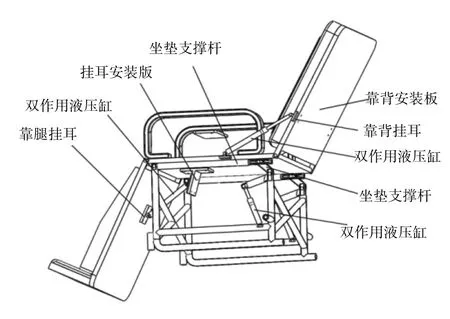
图4 折叠机构和俯仰机构
3 Ansys Workbench静力学分析
轮椅在使用过程中需要具有足够的强度以支撑外载荷,从安全角度分析,需要对轮椅的主体结构进行强度校核,判断是否能够满足实际的性能要求。坐姿可调节轮椅正常工作时,机构的受力主要来自于两个方面,一是轮椅自重和人体重量,二是液压缸的推力。
材料选择使用铝合金,一般铝合金轮椅重量在10~15 kg[12,13]。中国成年男性和女性的平均体重分别为69.6 kg和59 kg[14]。考虑极限工作情况,为坐垫安装板施加1000 N的正压力,两个液压缸推力均设置为500 N,同时添加9.8 m/s2的标准地球重力,如图5所示。
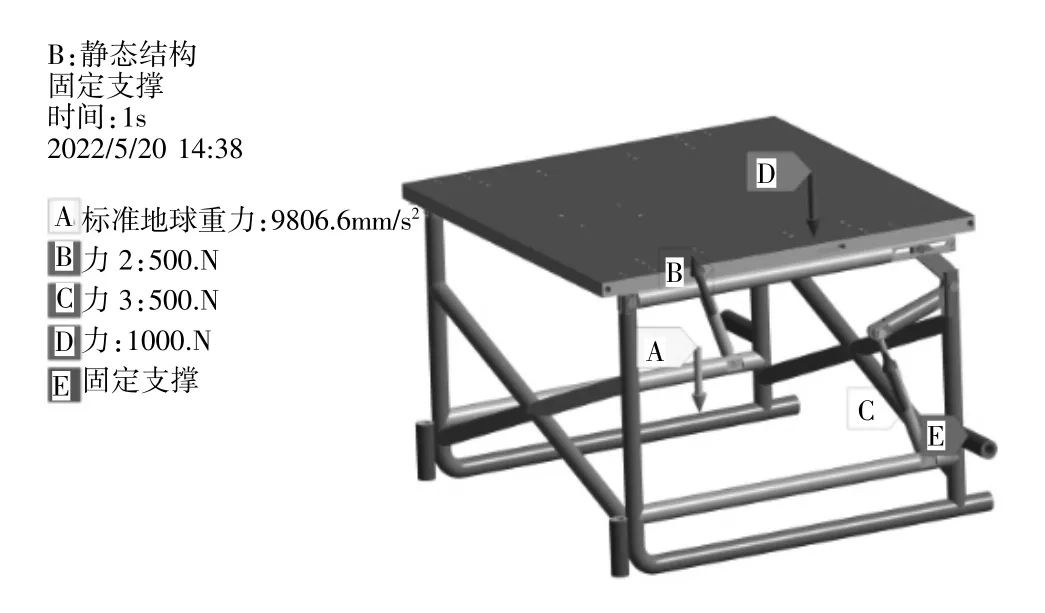
图5 载荷受力图
网格划分采用四面体网格,坐垫安装板受力较为简单,网格单元尺寸设为10 mm,轮椅架、坐垫支撑杆、坐垫调节杆网格单元尺寸设为5 mm,销轴的网格单元尺寸设为2 mm,共计节点数518558个,单元数327110个。
由图6、图7、图8和图9可看出所受最大应力为81.4 MPa,最大应变为0.0012 mm,铝合金强度较高,轻量化和耐腐蚀效果较好,且具有较好的抗冲击和抗震减噪能力,6XXXX系列和7XXX系列为轮椅使用较多的材料,综合考虑选择7050-T7451作为材料,其性能见表1。

表1 7050-T7451铝合金的机械性能[15]
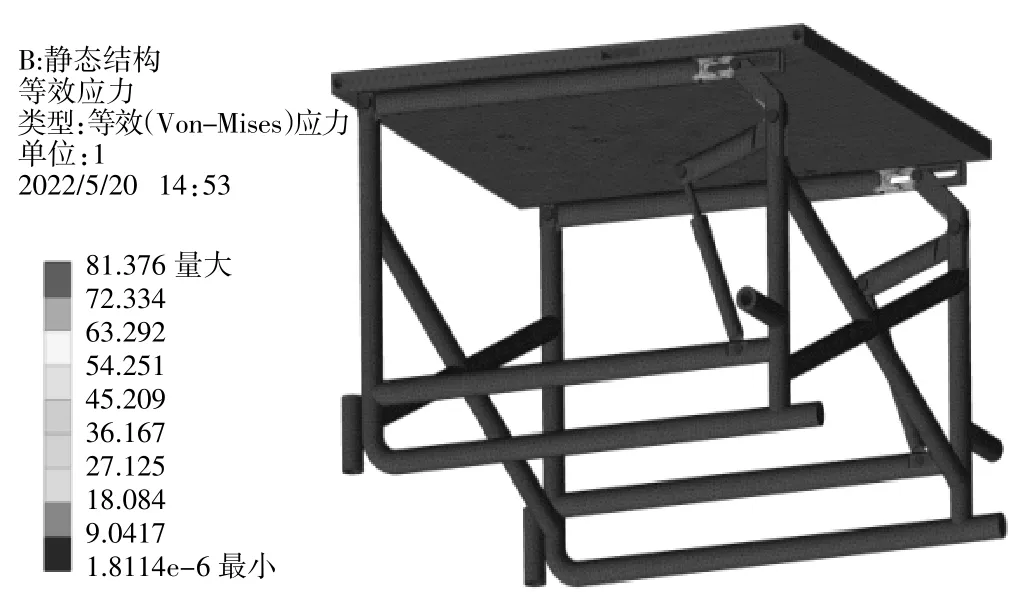
图6 轮椅架应力云图
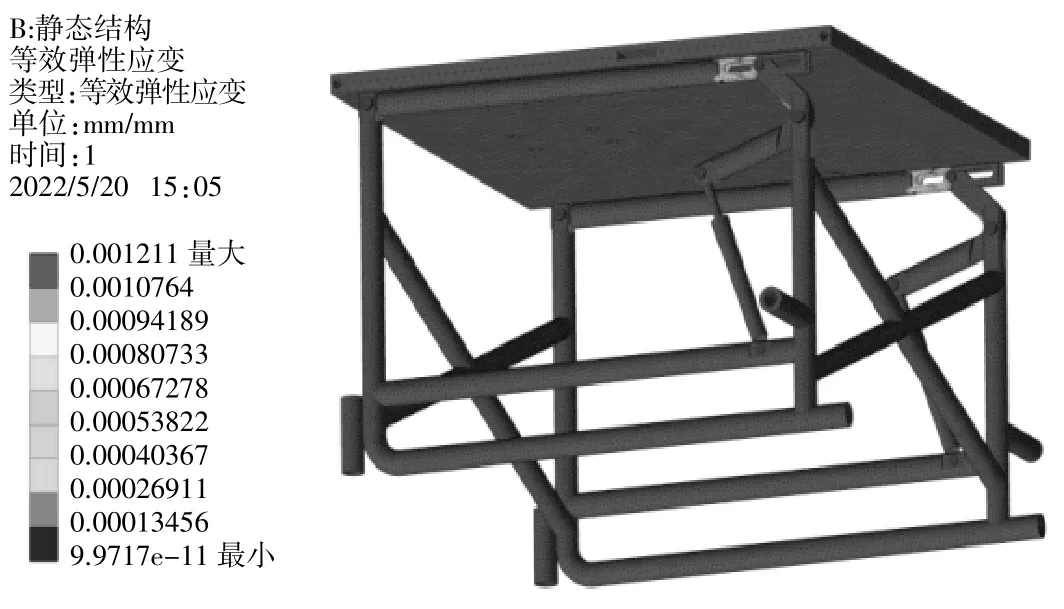
图7 轮椅架应变云图
坐姿可调节轮椅启动和暂停时会存在一定冲击力,为保证轮椅具有足够强度,取动载荷系数Kv=1.8,取材料许用安全系数[Sσ]=1.5,进行强度校核。
由式(1)可知,各部件所受应力均小于7050-T7451的屈服强度,满足实验模拟要求。但本强度校核分析是在理想状态下完成,与轮椅实际工作情况有一定差距,实际还需对关键部位进行强化处理。
4 Adams运动学仿真
通过Solidworks将轮椅模型简化并导入Adams进行运动学仿真。对轮椅重新约束,共40个约束。为模拟真实使用场景,为两个坐垫和靠背分别施加了500 N和250 N的正压力,为液压缸和丝杆分别添加了平移驱动和旋转驱动。采用STEP函数控制液压缸和丝杆的运行,运行时间为25 s,仿真步数为2000步。
为验证机构的运动轨迹是否满足人体坐姿调节的稳定性要求,在Adams中针对人体不同部位定义相关Marker点,分别设置在上肢躯干、臀部、大腿和小腿。图10为人体模拟Marker点的x轴和y轴位移图,图11为人体模拟Marker点的速度图。0~5 s调节靠背和靠腿相对于坐垫的角度,5~15 s前坐垫向左移动,后坐垫和靠背向右移动,完成人体的右转并返回中央位置,15~25 s前坐垫向右移动,后坐垫和靠背向左移动,完成人体的左转并返回中央位置。由图可知轮椅运行过程中没有较大的冲击,且速度平稳,能够有效保证用户安全。
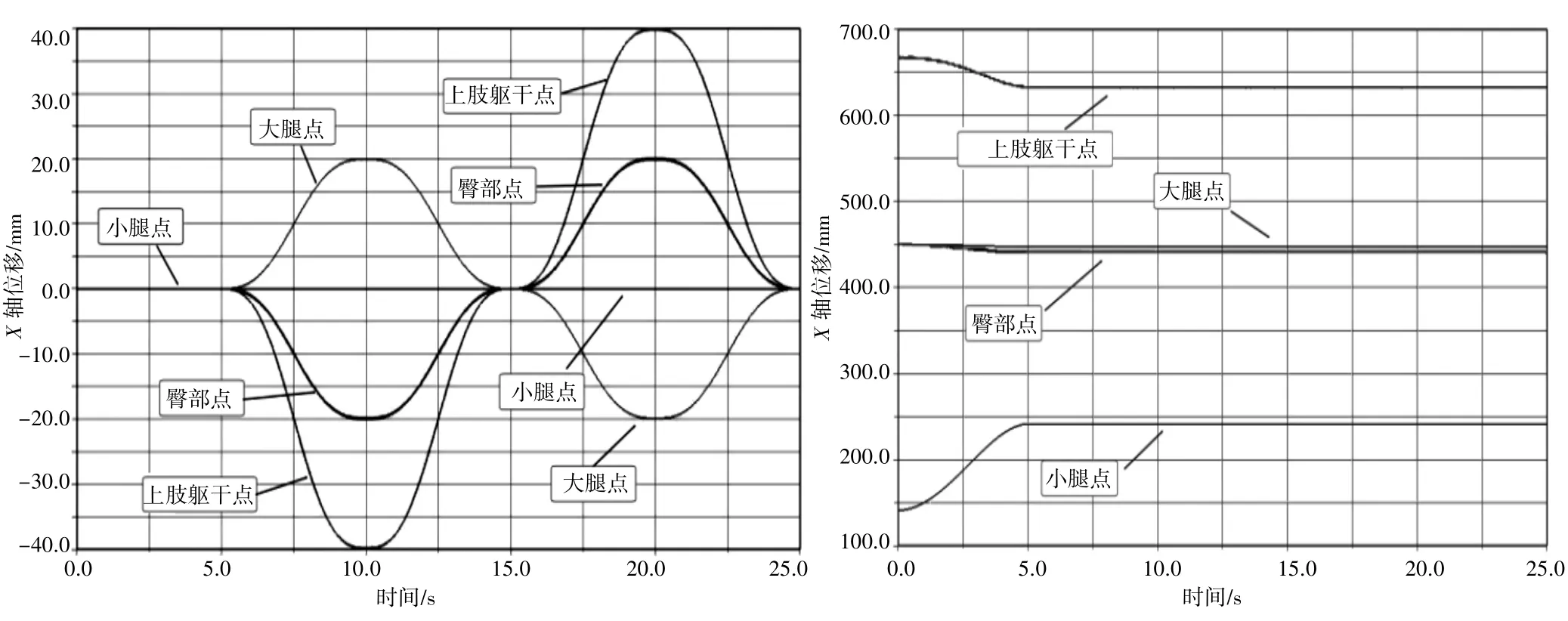
图10 模拟人体Marker点X轴与Y轴位移图
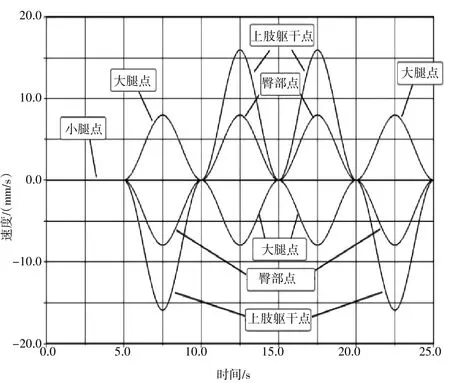
图11 模拟人体Marker点速度图
5 结语
设计的坐姿可调节轮椅,由折叠机构、轮椅俯仰调节机构、坐垫调节机构、靠背调节机构等组成,可通过手动或自动模式实现多种坐姿的转换,提高使用者的舒适度,降低护理人员劳动量。
通过Ansys Workbench对坐姿可调节轮椅主要承力部分进行有限元分析,结果表明,轮椅结构强度能够满足其安全性要求。通过Adams对轮椅进行运动学仿真,结果表明,轮椅坐姿调节过程平稳,没有较大冲击,满足其功能性需求。
猜你喜欢
鞍钢技术(2022年3期)2022-06-12
矿山机械(2021年3期)2021-03-25
文萃报·周二版(2021年52期)2021-01-22
文萃报·周二版(2021年51期)2021-01-02
小天使·一年级语数英综合(2020年9期)2020-12-16
发明与创新·小学生(2019年9期)2019-09-12
文萃报·周二版(2019年3期)2019-09-10
电子制作(2019年10期)2019-06-17
电子制作(2018年19期)2018-11-14
专用汽车(2014年1期)2014-12-10