双惯量发电机系统负载稳定性分析及机械谐振抑制策略
2022-11-10 04:30陆冬,丁强
微电机 2022年10期
陆 冬,丁 强
(南京工业职业技术大学 电气工程学院,南京 210023)
0 引 言
近年来,为了实现低碳环保的政策要求,船舶的传动、负载等设备电气化趋势日益明显。其中轴带发电技术(以下简称轴发)作为一项关键的节能技术在行业中逐渐得到推广。
轴发是利用主推发动机的富余功率进行驱动的发电系统[1-2]。由于主推燃油发动机的高效率工作区间较窄,只有在船只保持在经济航速时才能达到最佳效率,而在其他航速时效率较低。轴发系统可以根据发动机的实时转速调节转矩,使其工作在最佳效率区间,从而达到节能减排的目的。另一方面,轴发为船只额外提供了一种发电来源,与柴油发电机组共同构成了船舶交流电网系统,提高了容量和冗余度,降低了故障失电的风险。
轴发系统能量输入来源为船舶主推发动机,其通过传动装置驱动永磁同步发电机转动。该系统的机侧变流器以母线电压为闭环目标控制电机产生发电转矩,而网侧变流器将母线电压逆变为三相交流电,经过LCL滤波装置后,与柴油发电系统并联,给船舶上的照明、水泵等负载供电。
轴发系统中,船舶的原动机和同步发电机之间往往会存在变速箱、高弹性联轴器等传动环节。高弹性联轴器的使用目的是为了起到补偿安装误差、缓冲吸振、保护机械的效果。然而在实际应用中,弹性的连接方式在系统中也会引发机械谐振问题,产生不稳定因素。
关于电机系统机械谐振问题在交流伺服控制中研究较多,主要谐振抑制方法分为滤波器法和观测器法两类。
滤波器法通常采用低通滤波器或者陷波器滤除谐振频率,避免震荡分量对速度环的干扰。低通滤波器简单易用,但会引入相位滞后问题,对控制器带宽存在影响[3-4]。陷波器则需要通过离线或者在线辨识方案提取机械谐振频率,算法实现较为复杂。文献[5]研究了基于伪随机序列和Chirp信号的两种快速谐振特性获取方法,通过辨识的谐振频率确定陷波滤波器参数。文献[6]设计了一种在线自适应滤波器,无需对控制器参数进行更改,自动优化滤波器参数。
观测器法本质是将机械谐振转矩当成负载侧的扰动,通过观测器将该分量观测出来补偿到转矩设定值,实现对谐振的抑制。文献[7]利用龙伯格观测器来观测扰动转矩,并将扰动转矩通过一个比例积分环节反馈回电流给定。文献[8]基于卡尔曼滤波器设计负载转矩观测器,具有更好的谐振转矩的观测效果。其他的一些智能观测器[9-12]如模型预测、模糊控制、在线学习等方法虽然在一些特定领域也得到一定的应用,但在实际应用中,往往存在着参数敏感、对动态问题适应性差的问题。
然而,现有机械谐振抑制算法主要针对速度闭环模式进行设计。而轴发系统是以母线电压闭环为目标控制发电转矩,其控制环路特性与现有研究中速度闭环控制环路的差异性较大,导致现有的机械谐振抑制策略无法直接应用到轴发系统中。
本文首先利用轴发系统原动机惯量极大的特点,对双惯量运动模型进行简化,通过理论分析和仿真验证了机械谐振的产生机理。为进一步推导系统稳定的边界,重点讨论了机械谐振频率低于电压环带宽的情况,分析结果表明系统在低转速重载情况下,更容易进入不稳定区间。为提高系统的稳定边界,本文对机械系统和电气系统进行了类比,引入虚拟阻尼思想,从仿真和实验验证了虚拟阻尼对系统稳定性的改善作用,有效抑制了发散性震荡并提高了系统的功率输出能力。
1 机械谐振分析
轴发系统组成如图1所示。当考虑传动系统的弹性系数时,原动机和发电机组成的机械系统可看作为一个双惯量系统,其运动模型如图2所示,其中TM、Te和TL分别为主推发动机的驱动转矩,同步机发电转矩和螺旋桨的负载转矩;JM和JG分别为主推发动机和发电机的惯量;ωM和ωG分别为主推发动机和发电机的机械角频率;轴上的实际转矩TK正比于联轴器两端的角度差,其中K为刚度系数;Z为主推发动机和发电机传动部分的阻尼系数,阻尼转矩的一般形式为正比于传动输入和输出两端的速度差。
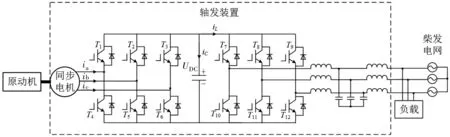
图1 船舶轴发系统典型拓扑
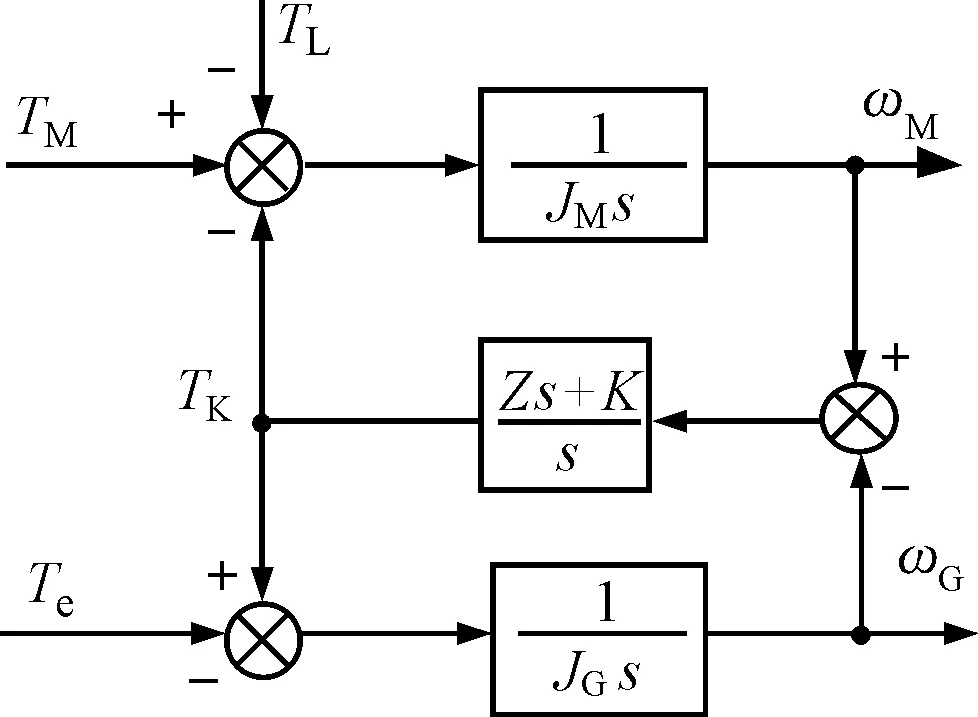
图2 双惯量系统运动模型
考虑到主推发动机的惯量包含了主轴以及螺旋桨的惯量,一般远远大于发电机惯量,其实际速度一般极其稳定,机械谐振转矩很难在主轴上引起明显的速度波动,因此认为ωM为常数,并忽略主机侧的相关传递函数。结合母线电压环路,可以将控制模型简化为图3所示。

图3 考虑运动模型的系统传递函数框图

将Te和ωG之间的传递函数记为H1(s),则有:
(1)
仅从该运动模型的传递函数来看,其两个极点均是处于s域的左半平面,另外由于阻尼系数Z一般较小,该极点较为靠近虚轴,因此是属于稳定的欠阻尼系统,其特征频率为:
(2)
在Matlab/Simulink中搭建图3所示的仿真模型,可以得到负载iL从零阶跃变化至200 A时的母线电压以及发电机的速度波形,如图4所示。其中Tf取0.005 s,ωM取104.67 rad/s,JG取32 kg·m2,Z取10 Nm/rad·s-1,C取45 mF,Uref取700 V,K取4000 Nm/rad。
由图4可以看出,在突加负载的瞬间,母线电压发生了38 V的跌落,母线电压调节器经过约100 ms的调节将母线重新调节至700 V附近,然而在随后的调节过程中,发电机速度发生了发散性低频震荡,震荡频率约为1.78 Hz,该频率和式(1)计算结果一致。母线也随之产生了小幅的震荡但幅值逐渐增大。不难预见,最终系统将趋于发散导致母线电压不受控制或者机械上的故障。

图4 阶跃负载下的母线电压和转速响应波形
该仿真结果表明,虽然发电机的运动模型本身是一个稳定系统,但其与母线电压环路相耦合后,会诱发产生不稳定的情况,需要进一步分析发散产生的机理和影响因素。
2 稳定性分析
对于上节中所产生的低频机械谐振,母线电压环的带宽显著高于该频率,母线电压调节器会有效抑制ωG引入的扰动,母线基本平稳,因此发电机的有功功率PG恒定,此时发电转矩可以表示为
(3)
发电机的运动特性可用如下的微分方程组描述:
(4)
式中,θ为传动环节两端的角度差。将式(3)代入得到
(5)
对于式(5),很容易看出,对于任意的PG,ωG和ωM,只要取:
(6)
即可满足等式成立。因此式(6)即为式(4)的解。但要满足系统稳定,还要对解的稳定性进行判断。根据李雅普诺夫稳定判据,满足稳定解的条件为式(5)右侧对ωG导数必须为负值,即
(7)
将稳态解式(6)代入得到
(8)
显然传动系统的阻尼越大,发电机输出功率越低,转速越高,系统越容易稳定。若要满足一定的带载能力,阻尼系数必须足够大以满足稳定条件。
3 虚拟阻尼算法
上述的分析结果表明,当机械谐振频率低于母线电压环带宽时,容易引发不稳定问题,传动部分的阻尼系数和电机转速决定了发电机的输出功率上限。若要提高发电机的输出功率能力,则需要优化传动系统的特性参数Z和K。但传动系统更换成本高,并且多数情况不具备更换条件。因此本文借鉴并网系统中有源阻尼思想,从控制端引入虚拟阻尼,优化系统稳定性。
本文提出将轴发系统机械部分特性和电气参数进行类比,例如联轴器刚度系数K类比于电容CK的倒数、电机转动惯量JG类比成电感LG、作用于电机的总转矩类比于电压UG、电机转速ωG类比为电感电流iG、电磁转矩Te类比为电压源Ue、转速ωM类比为电流源im、联轴器阻尼系数Z类比于电阻RZ,如图5(a)所示。将im,Ue视为该电路系统的激励,可以得到其动态传递函数结构框图,如图5(b)所示。
从为系统提供阻尼的角度看,电阻不仅可以存在于电容支路(图5(a)),也可以存在于电感支路(图6(a))或与电容支路并联(图6(b))。

图5 运动模型类比后的电路系统及其传递函数

图6 电阻Rz位于不同环节的阻尼形式
对比上述的三种结构,图5(b)结构需要同时采样发电机和原动机的转速,作差后得到阻尼转矩,而实际中一般不会对原动机转速进行精确的测量,因此实用性较差;图6(d) 结构需要对轴上的转矩进行测量,实际应用中也不具可行性。相较而言,图6(c)中生成的阻尼转矩仅需要发电机的转速信息即可实现,下文结合图6(c)阐述机械虚拟阻尼的实现过程。
将图6(c)所示电路系统反推回机械系统作为运动模型嵌入母线电压闭环控制回路中,如图7所示。为保证发电机转速响应和存在实际阻尼时相同,需要将阻尼转矩转化成附加的设定转矩并经过一个超前相位环节补偿电流环的滞后效果,叠加图中的A点。考虑到该附加转矩值会对主环路造成影响,可通过前馈方式在环路B点引入虚拟电流iz抵消附加转矩影响。引入的虚拟电流iz其物理实现方式只能通过主动控制负载电流大小(例如网侧逆变器工作在电流模式)或在母线上增加额外储能装置才能实现。然而,一方面,不是所有应用场合都能实现负载电流大小的主动控制。另一方面,母线上增加额外储能装置不仅使系统硬件连接方式变的复杂,也会增加系统成本,因此,该方案实际中较少采用。

图7 通过附加转矩和调节负载的虚拟阻尼实现方式
鉴于图7实现方式存在的问题,本文提出图8所示的虚拟阻尼实现方式,其基本思路是将附加转矩控制量转化为对母线电压的作用量,并前馈到图8的F点处,并在反馈母线电压中减去该值。

图8 通过附加转矩和反馈电压的虚拟阻尼实现方式
然而图8方案在计算附加阻尼转矩对母线电压的作用量时,存在着积分环节。这会造成母线电压设定值和反馈值之间存在静差。为了避免该影响,需要在该支路中增加高通滤波器以消除静差,Th为高通滤波器的时间常数。若震荡频率远低于电流环带宽,可以忽略对阻尼转矩补偿的超前相位环节,最终的控制框图如图9所示。

图9 带高通滤波器的改进型的虚拟阻尼方案
4 仿真与实验
为验证上节理论的正确性,在Matlab/Simulink中搭建仿真模型,相关参数上节中相同,阻尼系数取100 Nm/rad·s-1。
图10对比了图3系统在真实阻尼条件下以及图8和图9两种虚拟阻尼方案下转速和母线电压波形。与图4相比,图3系统在真实阻尼条件下转速均趋向收敛稳定,可以证明阻尼系数对抑制机械谐振的重要性。另外,图8和图9方案转速均稳定收敛,这是由于实现虚拟阻尼的过程中,始终保持了转速响应不变的原则。此外,从图10(b)可以看出,系统具有真实阻尼条件下母线电压响应最优。采用图8方案时,母线电压经过若干次震荡后稳定在615 V,与母线电压给定存在较大静差,这和上节中所述的推论一致。采用图9方案时,母线电压经过震荡调制后稳态时可收敛于设定值。

图10 虚拟阻尼方案响应对比
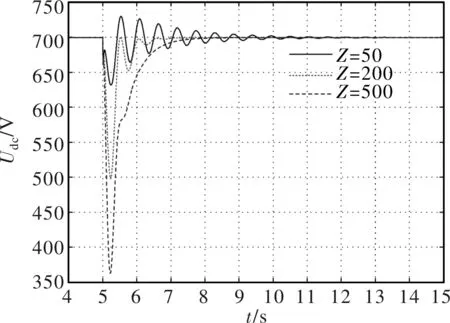
图11 不同虚拟阻尼系数下的母线响应对比
图11对比了不同阻尼系数时,图9方案在阶跃负载作用下母线电压响应波形。可以看出,阻尼系数越大,阻尼效果越明显。然而阻尼系数越大在负载作用下母线电压跌落也越大,因此虚拟阻尼是通过牺牲母线电压波动为代价实现的,在加载瞬间,系统通过主动降低母线电压,释放电容储能以避免发电机转矩剧烈变化,实现对传动系统的柔性加载。这也说明,虚拟阻尼方案需要有足够大的母线电容支持,否则在抑制过程中过大的电压波动会影响发电机以及网侧逆变器正常运行。
为了进一步验证算法的有效性,以某货轮轴发系统为对象进行验证。图12为轴发系统中原动机、发电机和变速箱实物图。为防止机械冲击损伤变速箱,两端均采用了弹性联轴器连接。发电机额定功率600 kW,额定转速1000 r/min。
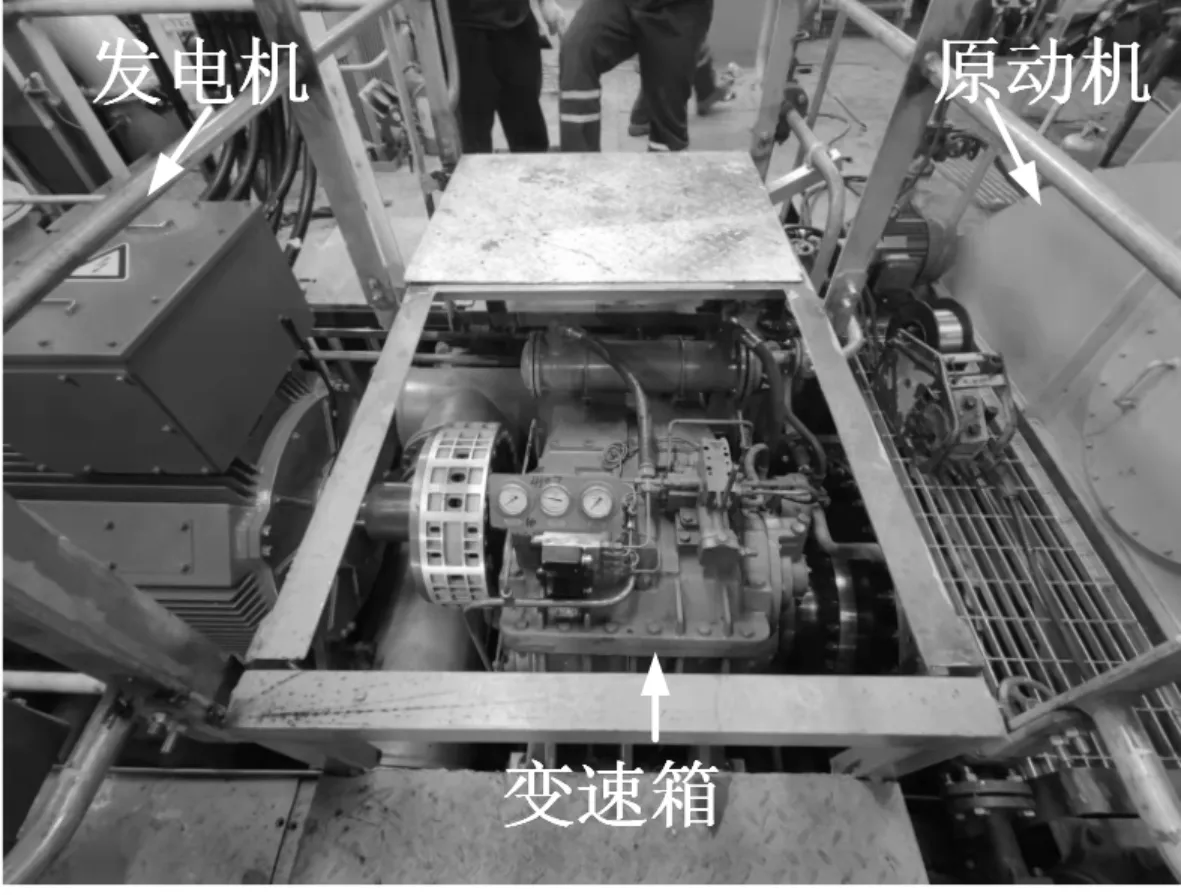
图12 船舶轴带发电系统
图13为在不采用优化算法时负载逐渐增大过程中各状态量波形。

图13 无优化时的带载波形
可以看到0至25 s阶段内,发电转矩小于3000 Nm,系统稳定。30 s至45 s时间段内,速度和转矩首先出现了轻微震荡,母线仍然平稳,这表明母线电压环路抑制住了速度震荡引起的扰动,此时转矩和转矩处于临界稳定状态。在45 s时间段后,负载增加到3600 Nm左右,速度和转矩发散,并引起了母线的波动,最终导致引起故障停机。该现象与第三节中功率增大后导致系统进入不稳定区间的分析结论一致。
采用图9方案引入机械有源阻尼算法后,图14和图15分别展示了突加突卸4000 Nm发电转矩以及满载5800 Nm稳态时的波形。可以看出,该方案在稳态时母线电压波动为±20 V,这是由于实际速度波动中含有各频次的震动分量,高通滤波器无法完全滤出机械谐振分量,将少量的其他频次扰动引入到了母线电压环。但得益于虚拟阻尼的增加,系统的稳定边界得到了提高,输出功率能力显著改善。突加突卸大功率负载瞬间过程母线波动不超过50 V,满足应用需求。
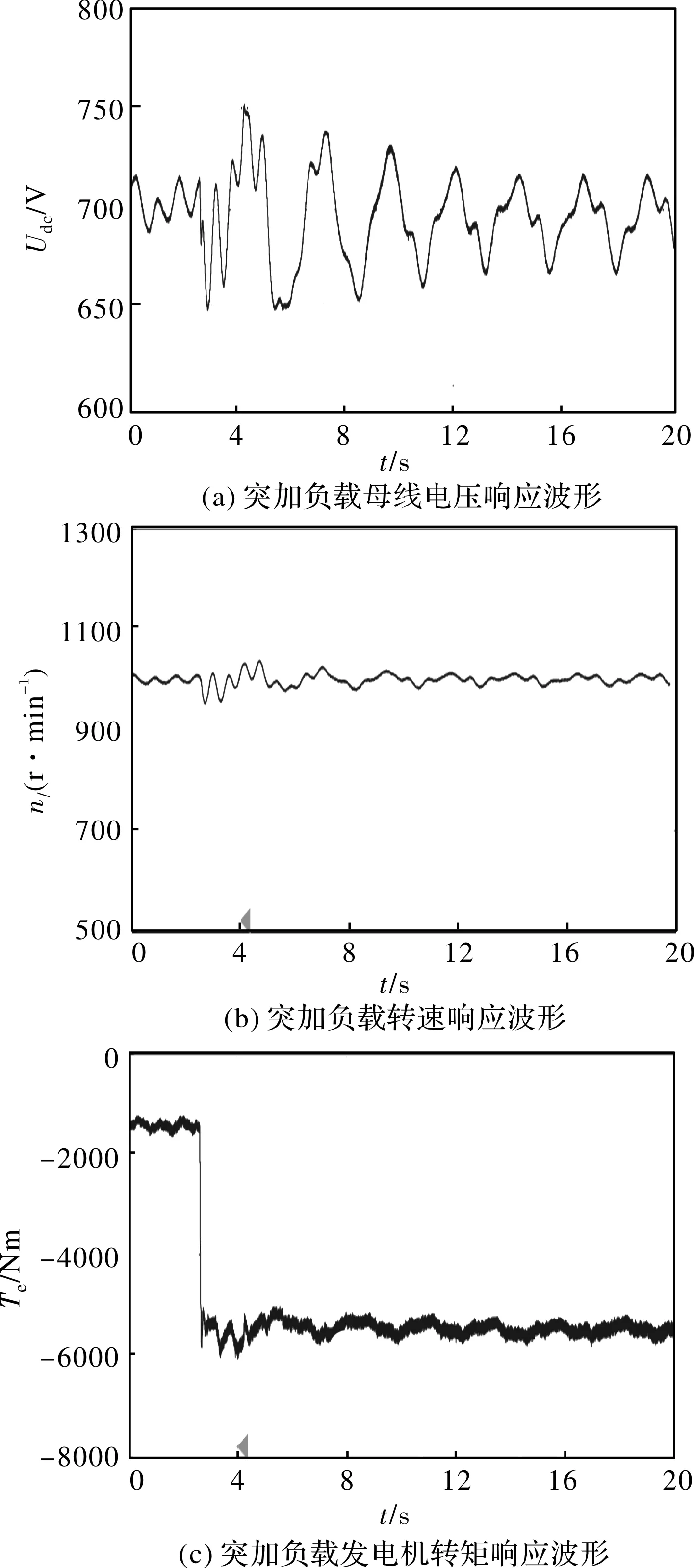
图14 突加负载波形
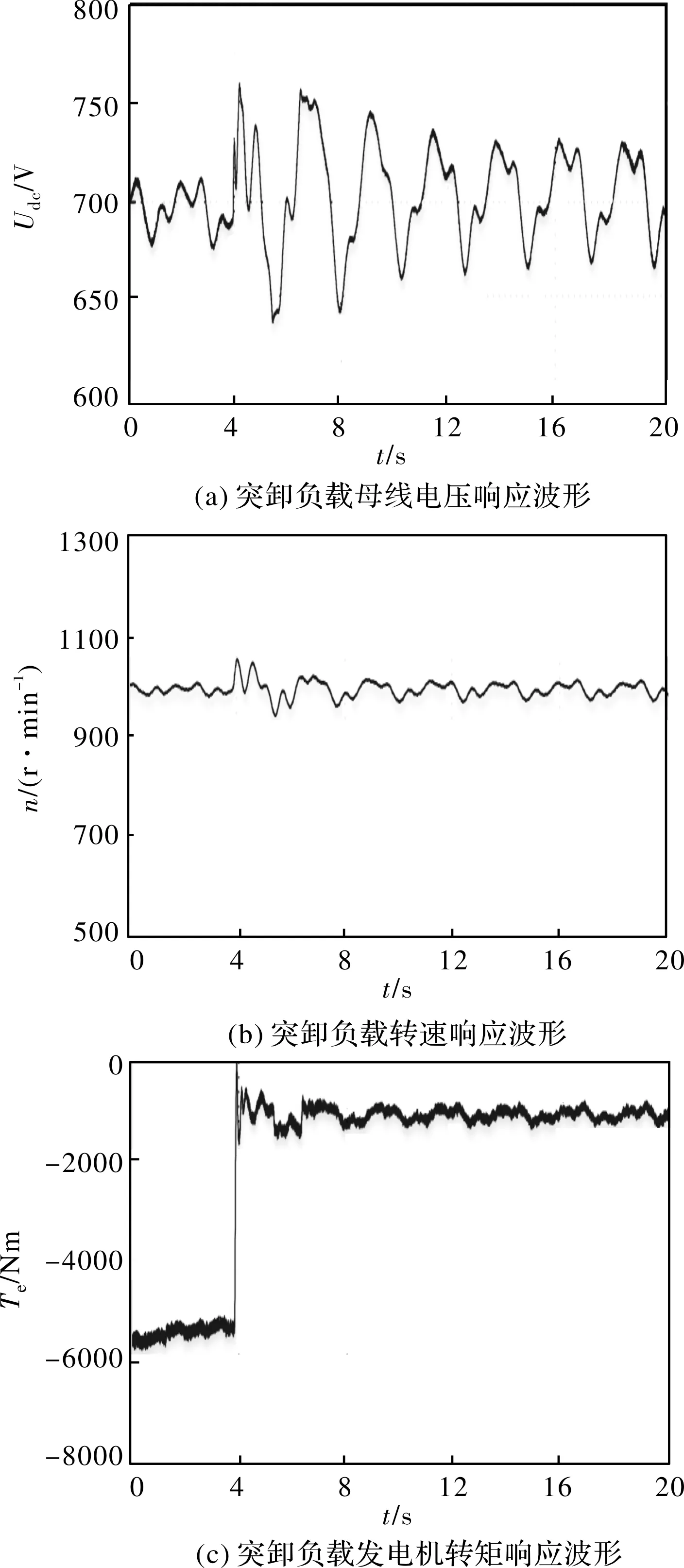
图15 突卸负载波形
5 结 论
针对由于弹性部件引起的发电机机械谐振问题,本文通过从双惯量运动模型出发,根据轴发系统的特点进行了简化分析,并结合母线电压环路,分析了谐振特性对稳定性的影响。分析结果表明,当谐振频率低于母线电压环带宽时,发电机的输出功率、系统阻尼以及发电机转速决定系统的稳定边界。为了以一种低成本的方式抑制机械谐振,提高稳定边界,本文将机械系统参数和电参数相类比,引入了机械有源阻尼算法,并从多种阻尼形式选取了最易于实现的算法进行推导。最终通过仿真和实验验证了理论的正确性。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
电力系统保护与控制(2022年19期)2022-10-21
现代电力(2022年2期)2022-05-23
能源工程(2021年5期)2021-11-20
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车工程(2019年4期)2019-05-07
电子制作(2019年7期)2019-04-25