
基于二维角度测量数据的目标关联方法研究*
2022-11-12 11:08金斌王书满翟云贺李林峰
现代防御技术 2022年5期
金斌,王书满,翟云贺,李林峰
(1. 海军研究院,北京 100161;2. 北京电子工程总体研究所,北京 100854)
0 引言
在现代战争中,控制电磁对战争的走向至关重要,随着电子技术的快速发展,雷达面临着越来越严峻的威胁。多传感器信息关联融合技术日趋完善,在各个领域得到了广泛应用,未来军事领域中该技术必将成为作战的关键性技术之一。一方面,面对外界的干扰,通过关联融合可以抑制噪声,降低目标识别的不确定性,以获得目标更准确、更全面的信息;另一方面,还可以将多传感器关联融合技术的高精度估计能力应用于无源定位系统,充分发挥其作用距离远、隐蔽性好的特点,来应对未来军事战争中的电磁威胁[1]。
不同测量站分别对目标进行测量,不同目标的二维测量信息组合问题对目标的定位起着决定性的作用,不同数据的组合过程中将会产生大量的虚假定位点,错误组合将导致无法定位目标或获得错误的目标位置数据,因此快速获得正确的数据关联关系是研究和应用中的难点[2]。
近年来,在目标数据关联方面出现很多算法,如联合概率数据关联法、多维分配算法、最小距离法,加权最小距离法,最大似然法等[3-9]。面对不同条件下多目标的同一性识别,不同方法有着不同的优势[10-15],同样也存在一定的局限性,如对系统测量精度需求较高;误差影响考虑不全面;随着测量站和目标的增加,虚假定位点急剧增多,计算量随指数增长,关联正确概率低。
针对多目标同一性识别问题,考虑工程应用中会面临的测量信息缺失、测量误差较大、计算性能有限的情况,本文提出了一种基于测角偏差和连续时刻内距离残差统计值的关联方法对目标数据的多目标同一性识别算法。
1 基于目标视线公垂线垂足差的目标同一性识别
设进行同一性识别的测量数据分别来自信息源Si和Sj,2 个信息源站址的大地坐标位置分别为(Li,λi,Hi)和(Lj,λj,Hj)。设(β,ε)分别为信息源直角坐标系下的目标方位角(°)和俯仰角(°),令Si站观测到的第mi个目标的二维航迹角度数据为标时视线示意图,通过不同测量站对目标的观测信息对目标进行同一性识别。
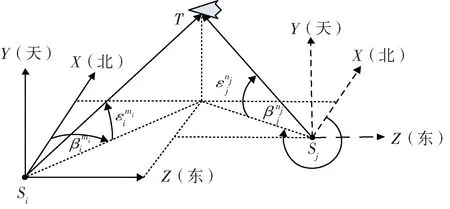
图1 信息源坐标系示意图Fig.1 Coordinata system of information source
Si和 Sj在地心地固坐标系(earth-centered,earthfixed,ECEF)下的坐标分别为(XSi,YSi,ZSi)和(XSj,YSj,ZSj),有:
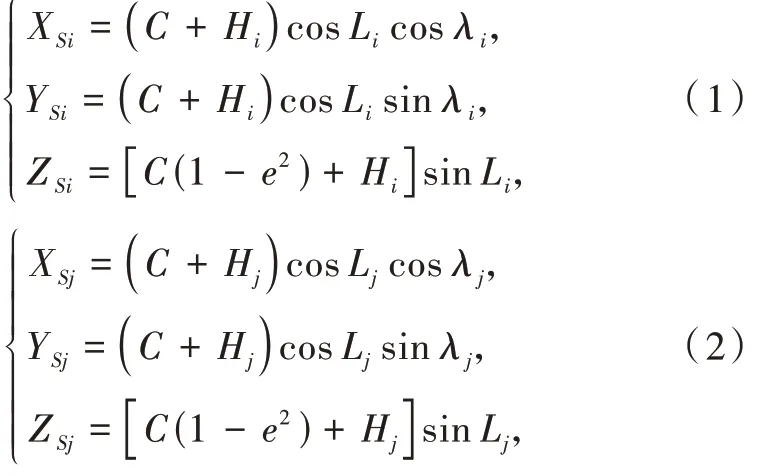
式中:C = Eq/(1 - e2sin2L)1/2,Eq为赤道半径;e 为地球偏心率,e2= 0.006 694 379 990 13。
1.4 影像学检查及治疗 PET-CT:右侧腋下术后改变;两肺慢性炎症,双侧胸腔少量积液伴两下肺膨胀不全;甲状腺密度欠均匀,提示右侧腮腺混合瘤可能;血吸虫肝硬化,肝脏多发囊肿,胆囊结石,前列腺增生。治疗:患者入院后首先拟诊“免疫性血小板减少症”,以甲强龙80 mg/d静脉滴注治疗1周后效果不满意,PLT上升不明显(24×109/L);确诊IgD型MM后,用含硼替佐米的方案进行化疗,2017年12月16日PLT上升至59×109/L,12月19日升为117×109/L。
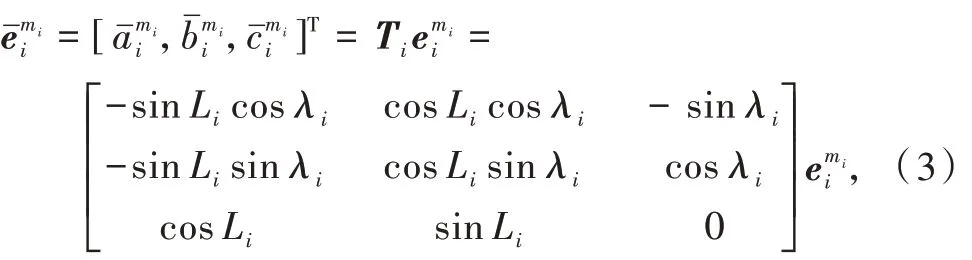
Si站观测到的第mi个目标在本地直角坐标系下的单位向量为

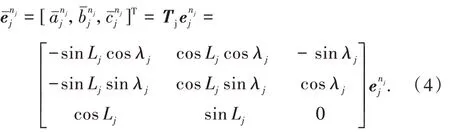
同理Sj站观测到的第nj个目标在本地直角坐标系下的单位向量为

设2 条目标视线的公共垂线为Lminjij,在 2 条视线
两视线在ECEF 坐标系下的直线方程可表示为
得到2 直线的垂直方程:

式中:
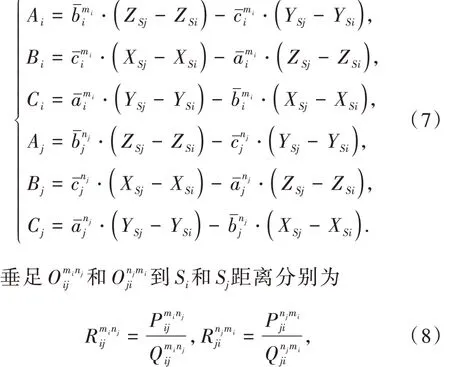
式中:
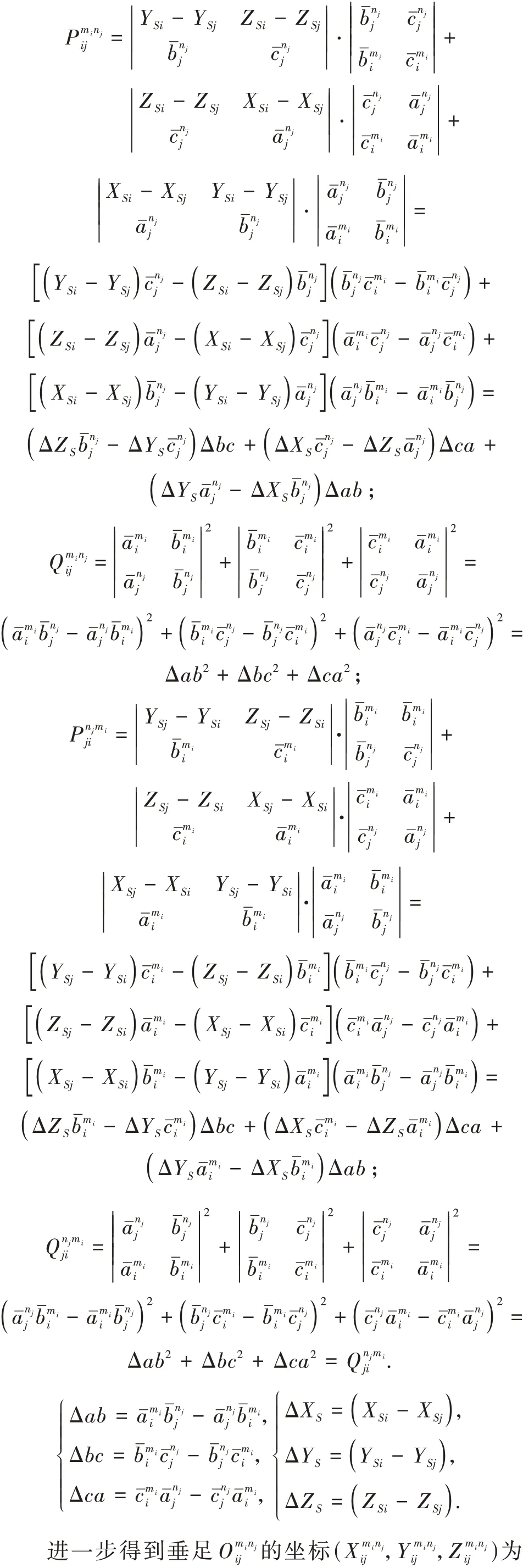
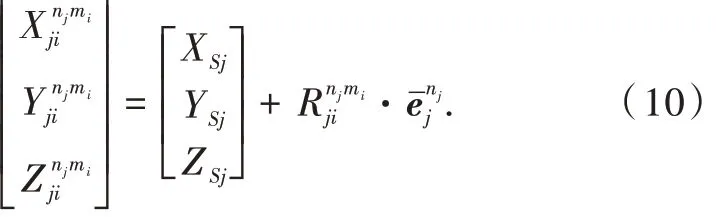
则2 条视线的公共垂线段长度,即2 个垂足间的距离差为
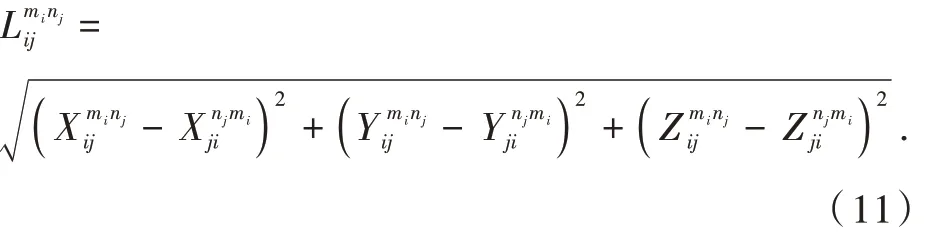
显然,当信息源测角不存在误差的情况下,来源于同一个目标的2 条视线最小间距然而实际上由于信息源存在测角误差,且不同信息源测角误差分布可能不一致,使得同一个干扰源在2个信息源的观测视角下的空间位置无法重叠,2 条视线存在一定间距。该间距的大小直接决定了门限的取值,也直接决定了2 条视线对应观测目标的关联程度。若要保证目标关联正确和关联稳定度,则需要选择合适的视线距离比较门限
设信息源Si的测角误差最大值为Δβi、Δεi,则在该信息源视线垂直方向上的垂定位误差最大值为

同理根据信息源Sj的测角误差最大值 Δβj、Δεj可得信息源Sj视线垂直方向上的垂足Onjijmi的定位误差最大值ΔRnjijmi。由于公共垂线Lmijinj同时垂直于2 条视线,那么可认为对于同一个目标而言,由于测角误差带来的2 个信息源视线最大间距为

2 基于测角偏差的目标数据的同一性识别
在同一时刻,2 个信息源的测量数据在空间中形成2 条视线,若2 个信息源的测量数据来源于同一个目标,则2 条视线相交于目标所在位置,否则2条视线在空间中无法相交。如图2 所示。
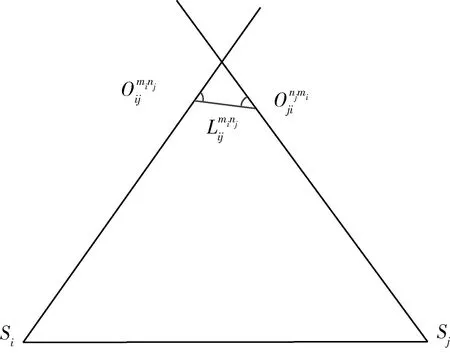
图2 视线交叉示意图Fig.2 Line of sight crossing
信息源Si站测量数据在地心系下的视线单位向量为

设地心坐标系下信息源Si与信息源Sj间的向量为
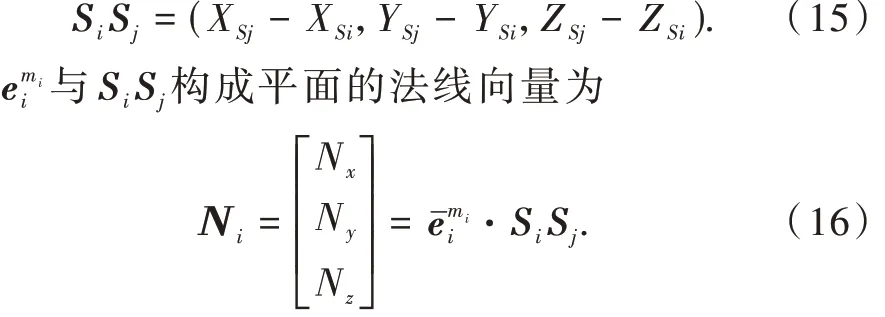

考虑测量误差的影响,若信息源Si的测角误差最 大 值 为 Δβi、Δεi,信 息 源 Sj的 测 角 误 差 最 大 值Δβj、Δεj,则当 θ 小于一定门限值时,认为 2 个测量数据来源于同一个目标,通过同一性识别。
3 基于连续时间内距离残差统计目标同一性识别
无论采用哪种同一性识别方式,对于密集目标,受测量误差的限制,均会有目标同一性识别错误的情况出现,但考虑到同一目标的测量数据对应位置差距(本文中的垂足间距离差)在连续的时间内应保持平稳,因此针对通过同一性识别的目标数据,可通过计算连续一段时间内垂足间距离差的方差值,认为方差值较小的2 组数据归属于同一目标。
由于需要对连续一段时间内距离残差的方差值进行计算,而统计时间越长得到的结果必定越准确,在目标较多的情况下增加了计算负担,因此可先通过视线角偏差对目标数据形成初步识别,对通过初步识别的数据组合进行距离差方差值的统计,这样既一定程度上降低了计算量,同时也保证了同一性识别的正确性。
4 仿真计算
设2个信息源分别为S1、S2,两站水平距离20 km,具体的站址数据和角度测量精度如表1 所示。采用基于目标视线公垂线垂足距离差的同一性识别方法对2 个目标进行同一性识别,目标的理论航迹如图3所示,图3 中坐标原点为信息源S1位置。
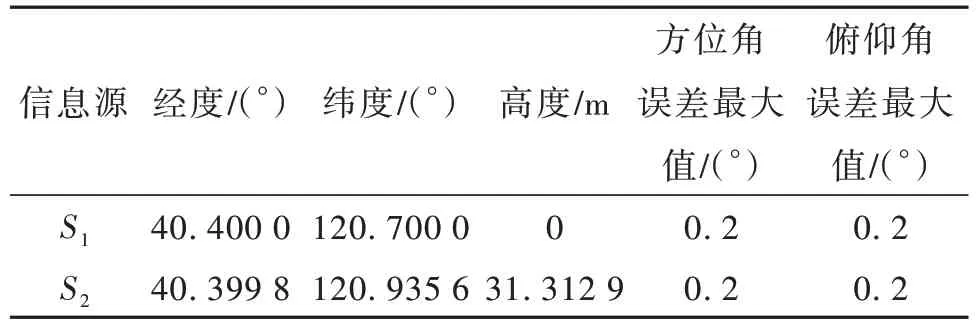
表1 信息源站址数据和角度测量精度Table 1 Location and measurement accuracy of information source
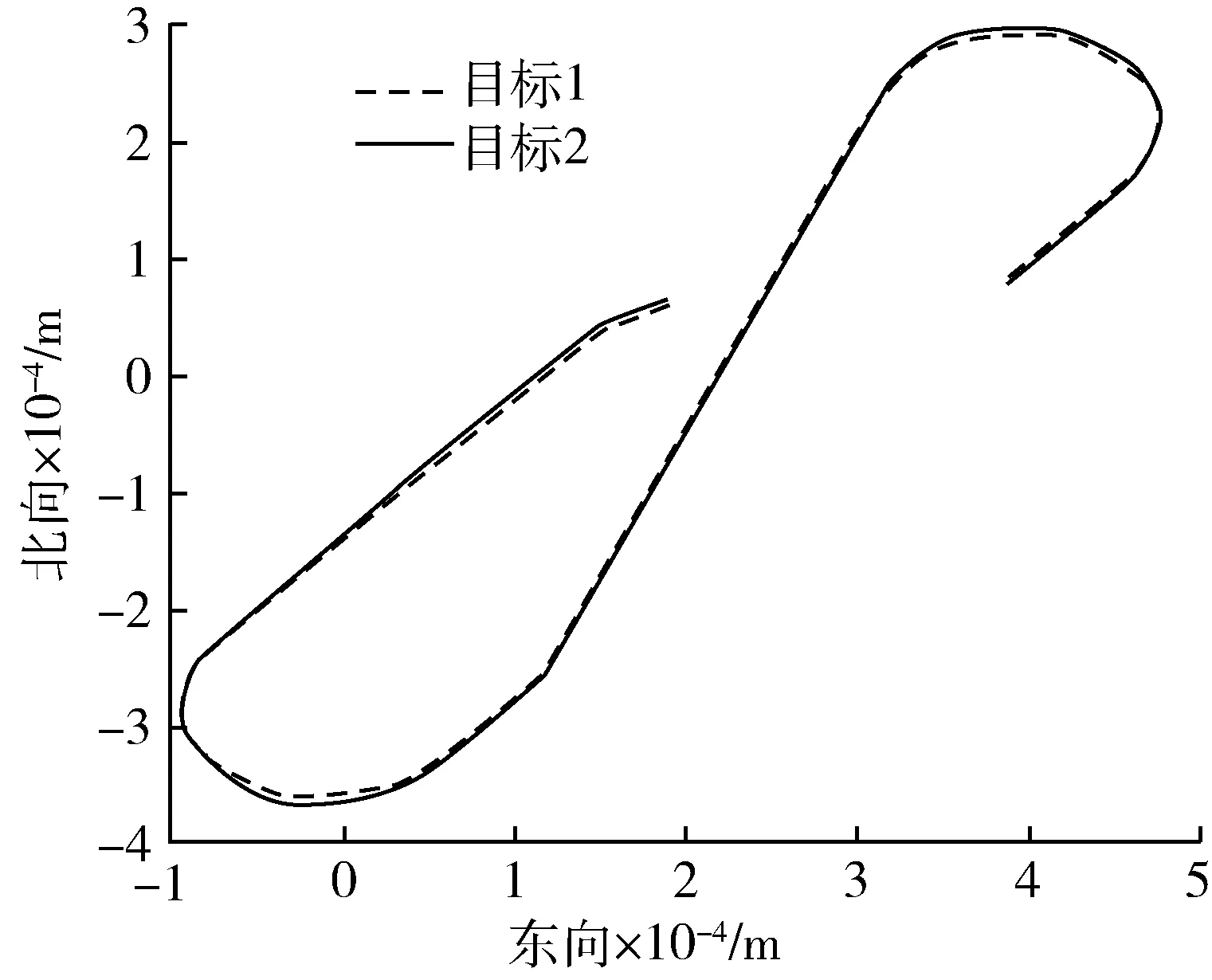
图3 目标理论航迹Fig.3 Theoretical track of target
分别对2 个目标北向距离间隔为200、1 000 m的情况进行仿真,仿真结果如图4、5 所示。
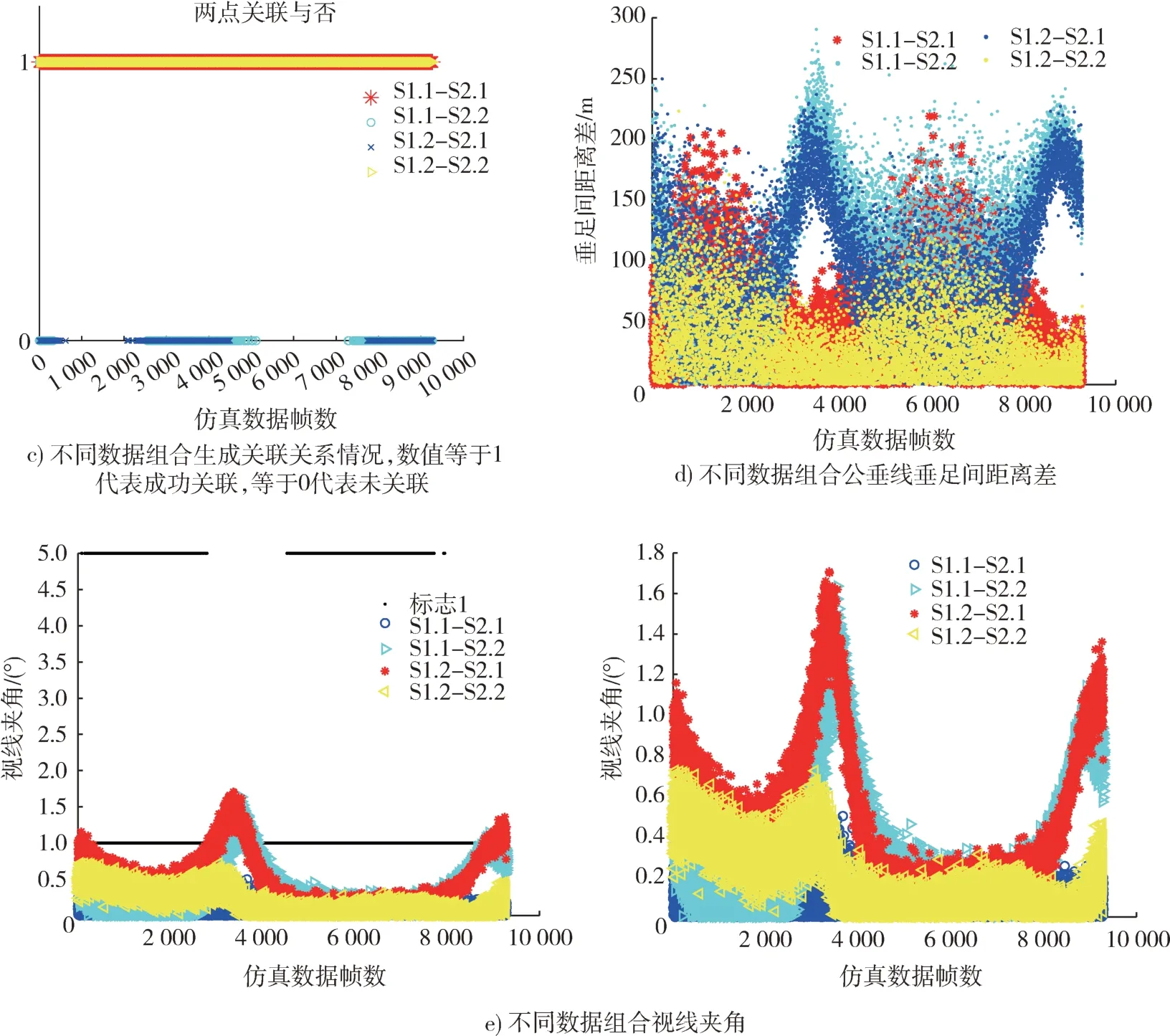
图4 目标北向距离间隔为200 m 仿真结果Fig.4 Simulation result of 200 m interval distance
图中S1.1 代表信息源S1对目标1 的测量结果,S1.2 代表信息源 S1对目标 2 的测量结果,S2.1 代表信息源S2对目标1 的测量结果,S2.2 代表信息源S2对目标2 的测量结果。S1.1-S2.1 代表信息源S1对目标1 的测量结果与信息源S2对目标1 的测量结果的融合数据,其余同理。标志1 代表2 组数据关联关系是否正确,如果关联与理论对应关系一致,则标志1 的值为1,如果关联关系错误,则标志1 的值为5。
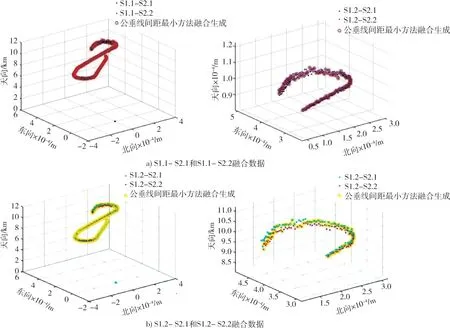
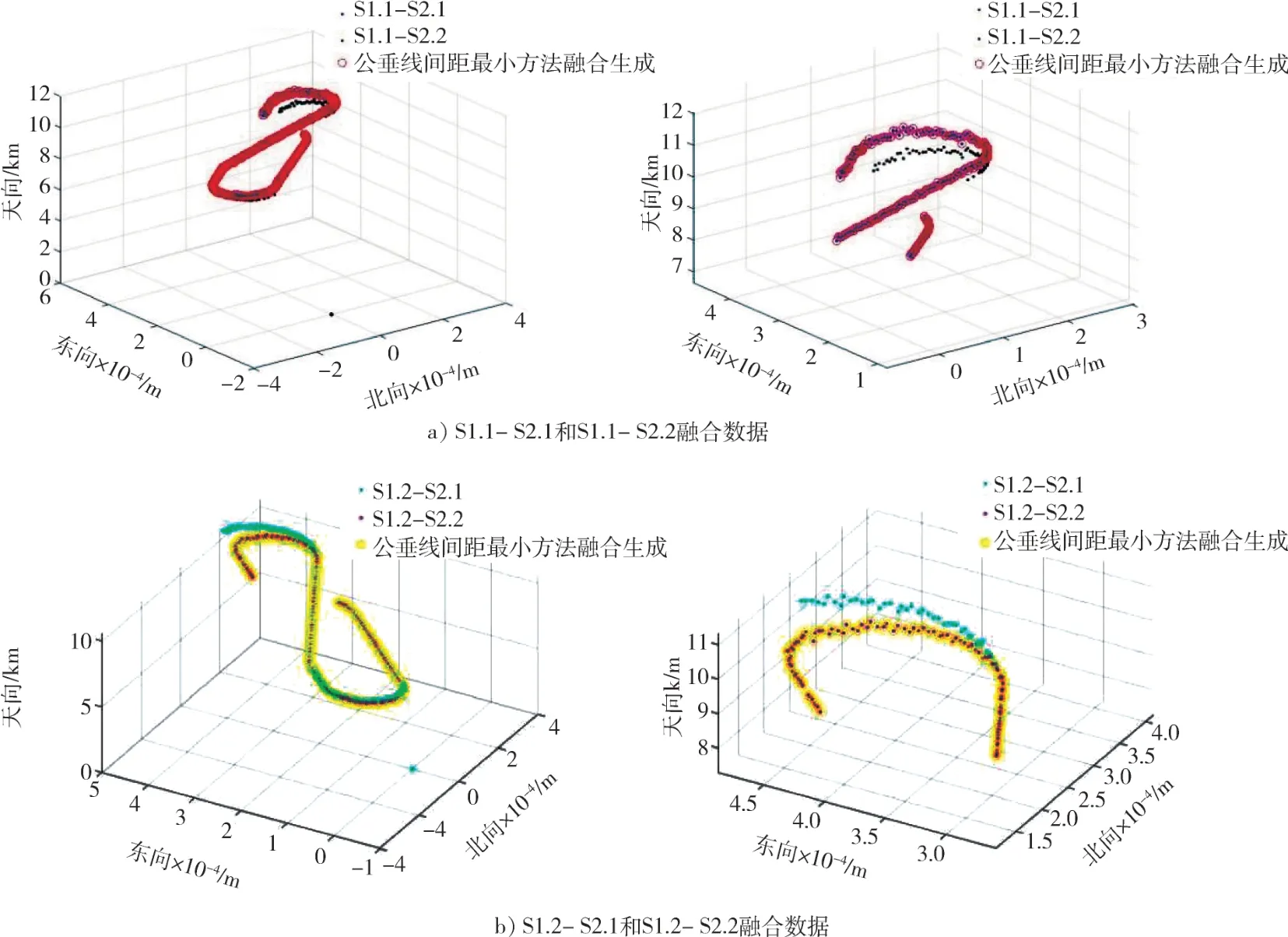
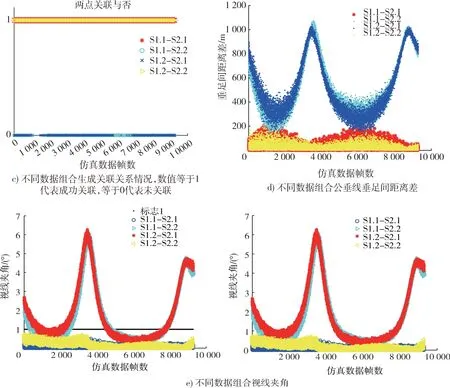
图5 目标北向距离间隔为1 000 m 仿真结果Fig.5 Simulation result of 1 000 m interval distance
不同目标距离间隔条件下关联正确率如表2 所示,通过仿真结果可以看出,在使用公垂线垂足距离差方法对目标进行同一性识别时,随着目标间距的减小,关联正确的概率显著下降。

表2 不同目标距离间隔条件下关联正确率Table 2 Association accuracy of different interval distances
通过图4、5 中的仿真结果分析发现,不同目标数据发生关联错误时,大部分情况下为正确关联关系和错误关联关系均同时满足垂足间距离差门限的限制,但错误关联的垂足间距离差更小,因此造成关联错误,此时对应的视线夹角也相对较小,因此无法通过垂足间距离差和视线夹角对其错误的关联关系进行剥离。但通过正确关联和错误关联数据的对比发现,当视线夹角较大时,通过垂足间距离差即可轻松获得测量数据的正确关联关系。
借助测量数据视线夹角的大小对目标数据进行初关联,在某个信息源的一个目标数据与其他数据源的不同目标数据均形成初关联关系的情况下,对满足初步关联关系的目标数据在连续100 帧内进行垂足间距离差方差值的计算,100 帧内有90%以上的数据满足垂足间距离差要求且方差值较小的2组测量数据认为归属于同一目标。分别对距离间隔为200、500 和1 000 m 的情况进行仿真,其中视线真结果如表3 所示。

表3 不同目标距离间隔条件下基于测角偏差和连续时间内残差统计值关联方法的关联正确率Table 3 Association accuracy base on deviation of line of sight angle and distance variance over a period of time of different interval distances
在方差计算时统计样本数的不同会造成方差计算值的变化,因此本文以2 个目标距离间隔500 m为例,通过改变距离差方差统计样本的数量,分析样本数量对目标数据关联关系的影响,具体仿真计算结果如表4 所示。

表4 不同统计样本数量条件下的关联正确率Table 4 Association accuracy base on distance variance over a period of time of different sample numbers
随着样本数量的减少,关联错误率有增加的趋势,这是应用中最不想得到的结果,因此应用中在条件允许的情况下需适当的增加距离差方差计算的样本数量。上述未关联率表示100 帧内没有满足90%以上的数据满足垂足间距离差要求,造成上述现象的原因是视线夹角大于门限值时,不进行垂足间距离差计算,即默认该帧数据不满足垂足间距离差的要求。该种情况下会造成数据在一段时间内难以形成稳定的关联关系,即对目标测量数据的关联造成时延,同时在未形成稳定关联关系的情况下需要维持距离差方差的计算,变相增加了系统的计算量。因此若要保证数据关联的快速性和减少系统计算量,视线夹角门限值不宜设置过小,当视线时,仿真结果如表5 所示。

表5 扩大视线夹角门限值后关联正确率Table 5 Association accuracy with larger line of sight angle threshold of different interval distances
增加视线夹角门限值,目标测量数据未关联率有了明显的改善。通过上述计算结果对比发现,在通过视线夹角判别条件的基础上,采用一段时间内垂足间距离差统计值的方法对目标测量数据进行关联时,关联正确率有明显的改善。
5 结束语
本文分析了地心坐标系下同时刻不同数据源2条视线公垂线垂足间距离差与数据源测角误差之间的关系,并依此建立视线公垂线垂足间距离差的门限值,同时结合地心坐标系下两站位置的连线,分析不同数据源2 条视线的视线夹角,并根据不同数据源测角误差建立视线夹角的门限值。依据视线夹角的计算公式及其门限值完成不同数据源目标测量数据的初步关联,对形成初步关联关系的目标数据进行视线公垂线垂足间距离差的计算,并在一段时间内对满足门限值的垂足间距离差进行统计,统计值小的形成最终关联关系。依据上述方法对不同条件下双目标场景进行仿真验证,结果表明,面对密集目标场景该算法在保证计算效率的情况下,能够保证较好的关联成功概率。
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
思维与智慧·下半月(2021年11期)2021-11-23
活力(2019年19期)2020-01-06
航天电子对抗(2018年3期)2018-07-14
航天电子对抗(2018年6期)2018-03-04
金色少年(奇趣科普)(2017年11期)2017-11-28
当代贵州(2015年19期)2015-06-13
雷达学报(2014年4期)2014-04-23
新疆农垦科技(2014年9期)2014-02-28
图书与情报(2014年3期)2014-02-27
