基于CFD的变后掠翼单速度最优后掠角预测模型
2022-11-16 16:26盛子豪
海军航空大学学报 2022年1期
盛子豪,范 庚,汉 田
(海军航空大学,山东 青岛 266041)
对变后掠翼飞行器的研究始于20 世纪40 年代,德国研发了世界第1 种变后掠翼战斗机——Me P.1101,50年代,美国贝尔公司在此基础上设计出贝尔X-5。60 ~70 年代,变后掠翼飞行器进入了发展的黄金期,最具代表性的如F-14、米格-23、苏-24 等。之后,由于技术受限,变后掠翼逐渐被固定翼取代。近年来,随着计算机辅助、材料和芯片等技术的发展,使得变后掠翼飞行器迎来了新的发展机遇,美国、俄罗斯等国已争相开展对可变后掠翼的研究[1-4]。
国内学界在变形翼方面的研究,如:朱华、刘卫东等通过比较智能材料作动器的性能,提出利用超声电机驱动飞行器变形[5];吴俊、陆宇平提出1 种分布式协同控制方案来控制机翼变形[6]。以上研究都具有一定的代表性。
变后掠翼作为变形翼的1 种,受到更多地关注。1980年,我国以强-6作为第一代变后掠翼飞行器。近年来,董彦非等人利用CFD 技术,对多条件下变后掠翼飞行器的机翼后掠角控制进行了探究,通过插值法补充数据并采用遗传算法进行全局寻优[7-9]。在后掠翼可变的结构设计上,王钊提出1 种自适应变后掠翼机构,能根据最佳变后掠角规律,实现被动控制飞机的变后掠过程[10]。
变后掠翼飞行器在民航领域应用较少,更多的是应用于军事。远距离突防性能是未来武器发展趋势,续航则是关键性能。美国最新的增程式导弹是在原有域外攻击巡航导弹的基础上,对射程、精准度、战斗部穿透力和任务规划等方面进行了升级,它在结构上的最大特点就是采用了水平翼布局,这种改变大大提升了武器性能。该型导弹的宽翼展对飞机的结构及挂载能力提出了更高要求。更为先进的联合空面防区外导弹(JASSM)则对此进行了改进,虽同样采用了水平翼布局,但不同之处在于它采用了伸缩翼,这样可以减小弹仓的占用空间,不仅适配更多机型,而且同时又可达到远距离攻击的目的。但该型导弹的弹翼只具备伸缩特性,并不能根据当前导弹工况来改变后掠角度[11]。我国学者也在导弹领域进行了相关探索:王江华、谷良贤等以遗传算法与模式搜索法相结合的混合优化策略改进了1种伸缩弹翼模型的控制策略[12];李伟明等采用粒子群算法形成1 种基于迎角与后掠角控制的弹道优化设计方法[13];夏美从生存性、可用性、杀伤力及对抗环境下表现等方面论证了亚音速反舰导弹更具优势[14]。同时,从美军导弹的武器特性中可以了解到,该类型武器均是亚音速巡航。所以,本文飞行器考虑到长续航因素,将速度范围定为亚声速以下。
国内研究多采用遗传算法和插值法对变后掠翼在全速度下进行全局寻优。本文在1种新型变后掠翼飞行器模型基础上,寻求变后掠翼飞行器在单速度下更为简单的全局寻优方法。尝试使用多项式数学模型替代原有模型进行,并通过CFD仿真软件对其进行仿真与验证。总体研究思路如下:
1)设计新型变后掠翼飞行器模型,通过Solid-Works软件建模;
2)选定飞行器迎角、速度和后掠翼的后掠角度范围及变化步长;
3)设置模拟流体力学仿真边界、网格、来流状态等参数;
4)对不同状态下的飞行器模型进行CFD模拟;
5)选取在不同状态下最佳后掠翼后掠角度;
6)对所有结果进行后处理,并建立该飞行器在单一速度下的后掠翼最优后掠角预测模型;
7)将预测模型结果与CFD 计算结果进行对比,验证模型准确性。
1 变后掠翼飞行器建模
对飞行器进行了弹翼布局选型,弹翼、尾翼设计,机体(包含头部、机身、尾部)设计。参数如图1所示。
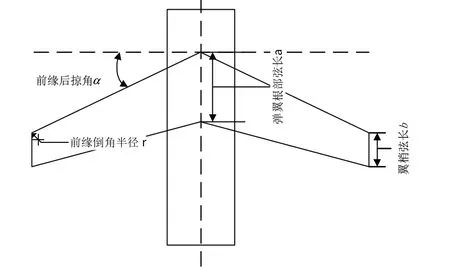
图1 飞行器尺寸参数Fig.1 Size parameters of the aircraft
整体上,飞行器的尺寸设置参考了部分通用机体尺寸,在细节上做了如下规划:
1)选用激波影响相对较小,内部空间相对较大的抛物线形头部作为外形;
2)选用阻力小、抛物线形作为尾部;
3)尾翼结构采用了对称翼型剖面NACA0009,根梢比1.25;
4)弹翼根梢比η=a b=1.5 ,前缘倒角半径r=150 mm;
5)机翼翼型剖面采用NACA6409(属典型非对称翼型剖面);
6)飞行器两翼前缘后掠角度α,其可变范围是[15°,45°] ,为方便描述,本文所称后掠角均指前缘后掠角。
建模后飞行器,如图2所示。
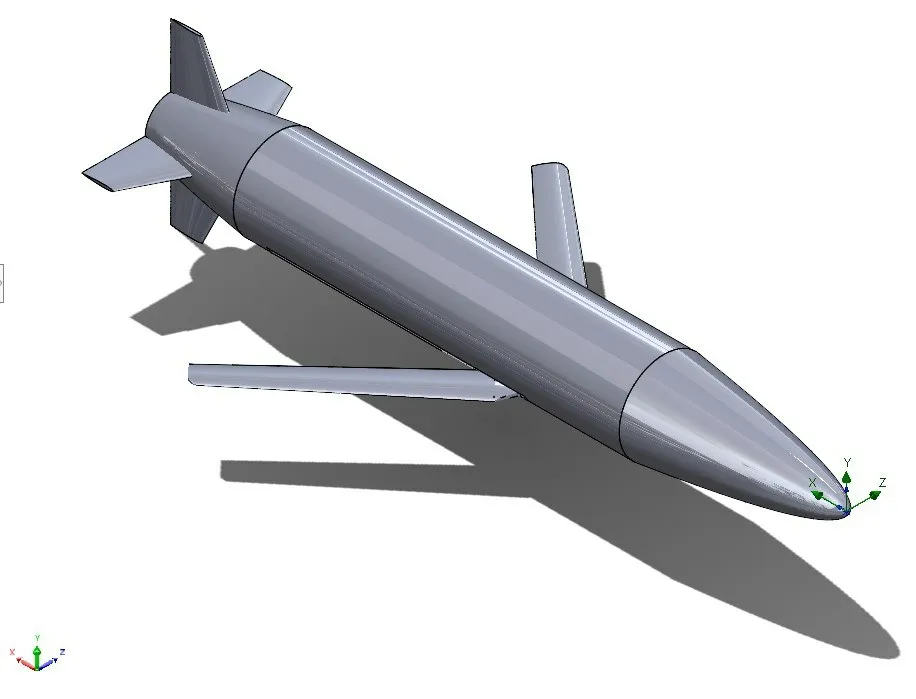
图2 变后掠翼飞行器模型Fig.2 Model of variable-sweep wing aircraft
当弹翼完全展开时,飞机处于大展弦比的状态,理论上该状态适用于低速飞行,有利于提供良好的升阻比;当弹翼折叠,展弦比变小,根梢比变大,理论上该状态适用于高速飞行[15]。同时,为了不影响机身的气动布局,在该飞行器机身中下部预留一部分舱内空间,以安放弹翼。
为了得到定量评判,本文以升力、阻力、升阻比及俯仰力矩作为评价气动性能的指标。在不同速度,迎角、弹翼后掠角度下,对飞行器气动性能进行全覆盖式的仿真,根据仿真结果来探究后掠角度规律并进行预测及验证。
2 仿真理论基础及条件范围设定
本文采用COSMOS作为CFD仿真计算软件。其理论基础为Navier-Stokes方程[16]:
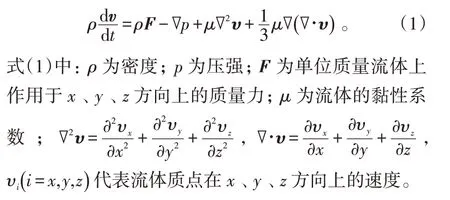
仿真也考虑了湍流的模拟,湍流模型为强度-长度模型以及湍流耗散模型。本文为减小湍流影响,选用了默认的强度-长度模型,湍流强度为0.1%,湍流长度为0.003 5 m[17]。
网格划分可以使用结构网格、非结构网格及混合型非结构网格[18]。这里选用结构网格,在模型曲面处进行多级网格细分。仿真前,其他预设环境条件,见表1。
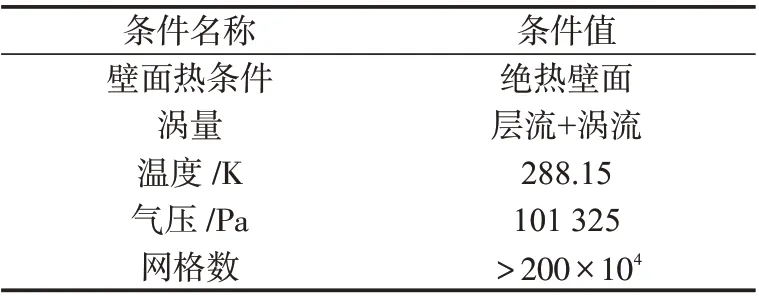
表1 其他预设环境条件Tab.1 Other preset environmental conditions
因为全覆盖式仿真计算量大,所以在最终仿真前要对仿真范围、方式进行进一步规定,根据模型结构、飞行条件选定范围,如表2所示。
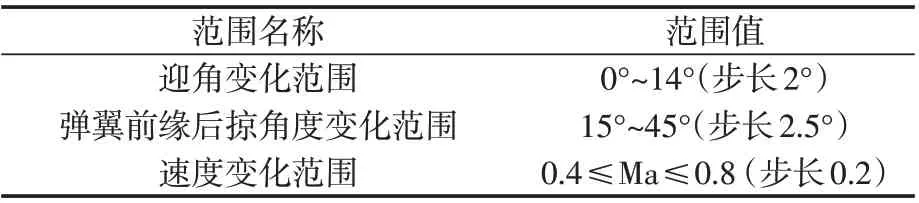
表2 计算仿真范围Tab.2 Simulation range
须说明:
1)为了避免数据过多,弹翼后掠角度变化步长设置为2.5°,飞行器速度变化步长马赫数为0.2;
2)经筛选,共选取39个关键点进行CFD仿真,每个关键点都要在0°~14°迎角条件(步长2°,共8 次)下进行仿真,共进行312次仿真。
3 仿真结果
仿真结果表明,升阻比的大小受速度、迎角、后掠角度影响,其中迎角对升阻比影响较大。同样,不同后掠角度、速度下的最大升阻比对应的迎角也是不同的。现将仿真结果进行后处理,如果速度和后掠角不变,将迎角从0°~14°(步长为2°)变化过程中所得到的升阻比作为1组数据的话,可得39组数据。如当飞行马赫数为0.4,后掠角为15°时,将由迎角变化所得的8个升阻比数据作为1组,如表3所示。
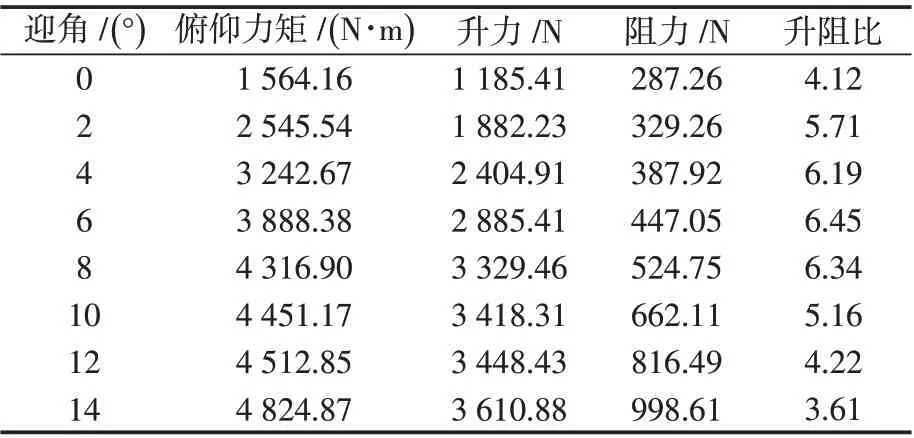
表3 飞行马赫数为0.4、后掠角15°,随迎角变化所得仿真结果Tab.3 Simulation results with the angle of attack when the Mach mumber is 0.4 and the swept-back angle is 15°
由于本文旨在预测最大升阻比的变化趋势,所以只取每组数据中数值最大的升阻比及其当时对应的速度及后掠角度进行研究。可得出在不同速度、后掠角下每组数据和数值最大的升阻比对应的升力、阻力、俯仰力矩和升阻比变化趋势,如图3(此图未标注每个数据对应的迎角)所示。
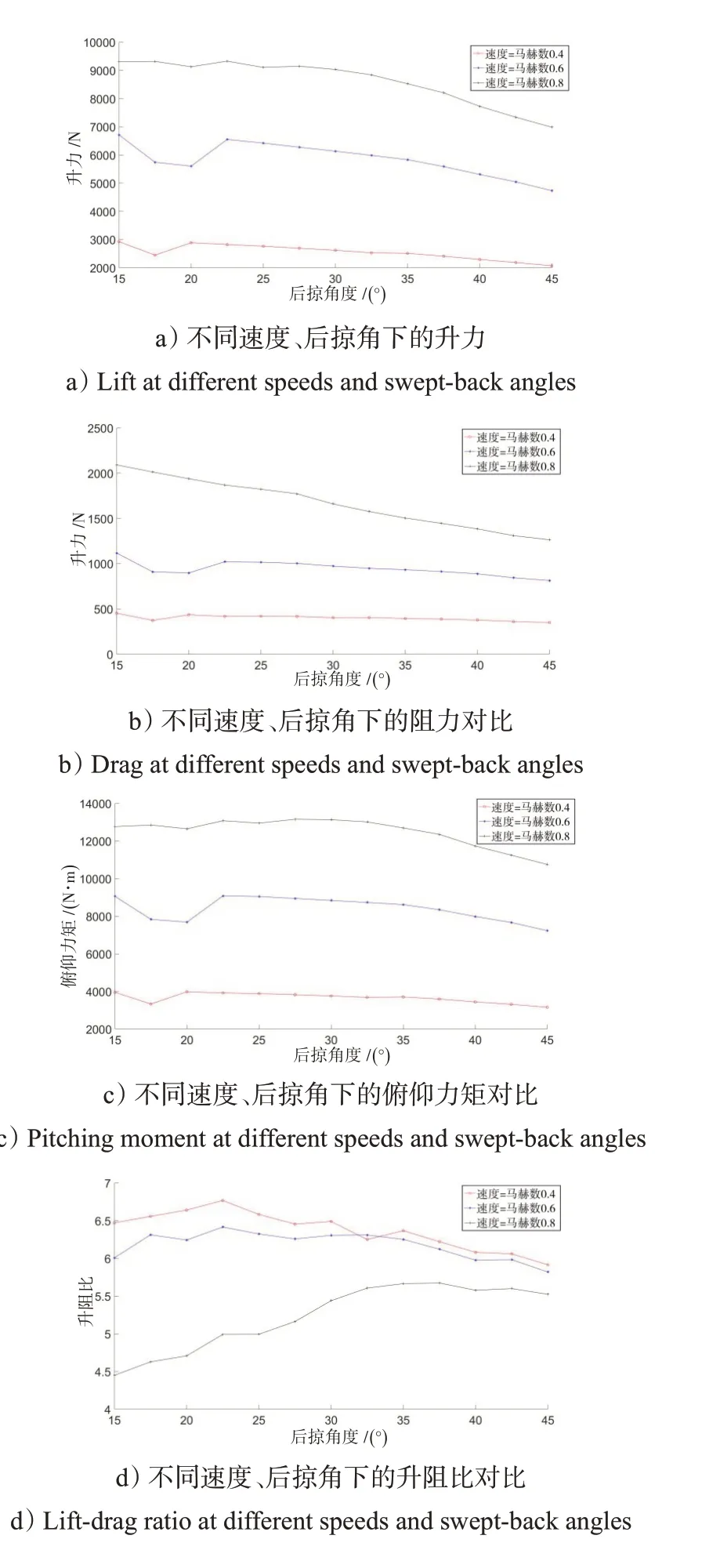
图3 不同速度、后掠角度下各项仿真结果Fig.3 Simulation results at different speeds and sweep-back angles
仿真结果得出:该飞行器在飞行马赫数为0.4 时最大升阻比约为6.76,迎角约为6°,此时弹翼前缘后掠角度为22.5°;飞行器在飞行马赫数为0.6 时最大升阻比约为6.41,迎角约为6°,此时弹翼前缘后掠角度为22.5°;飞行器在以马赫数为0.8 时最大升阻比约为5.703,迎角约为4°,此时弹翼前缘后掠角度为37.5°。
通过上述分析可知,在以上的取值范围内,会有1个升阻比的极大值,但它是否是唯一的极大值,这需要知道各组数据中最大的升阻比的变化规律,而变化规律仅通过这39 组数据的离散结果是无法得到的。可以利用CFD软件进行大量仿真实验,再通过曲线拟合得到的结果,找出其中的规律,最终确定变化策略。由于这一过程需要耗费大量的计算资源及时间,所以,本文提出另1种方法,根据已有数据建立数学模型,预测最优的后掠角度。
4 预测模型及验证
为了验证该方法的可行性并减少计算量,根据已有的仿真结果,将升阻比及对应的迎角数据进行整合,得到曲线,如图4所示。
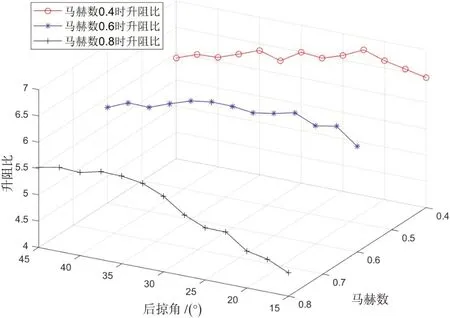
图4 变后掠翼飞行器升阻比Fig.4 Lift-drag ratio of variable-sweep wing aircraft
根据条件范围可知,仿真过程中,将弹翼后掠角度的步长设置为2.5°,所得到的值是非连续性的。预测模型建立的思路是根据对上述各组数据取某一速度下的结果进行拟合,通过连续曲线就能找到在该速度下的最值点,即最大升阻比。
多项式曲线、插值曲线、局部加权回归曲线为数学模型的建立提供了参考依据。通过对比不同曲线,判断拟合后曲线与仿真曲线的误差及方差,最终,确定采用多项式曲线对数据进行拟合较为合适。经过次数为1~9 的拟合后,发现从4 次多项式拟合曲线趋势可以接近仿真曲线,虽然5 次及以上多项式的拟合值与仿真值在均方差和确定系上表现数更优,但是明显出现了“过拟合”的现象。在马赫数为0.4 时,拟合曲线与仿真数据,如图5所示。
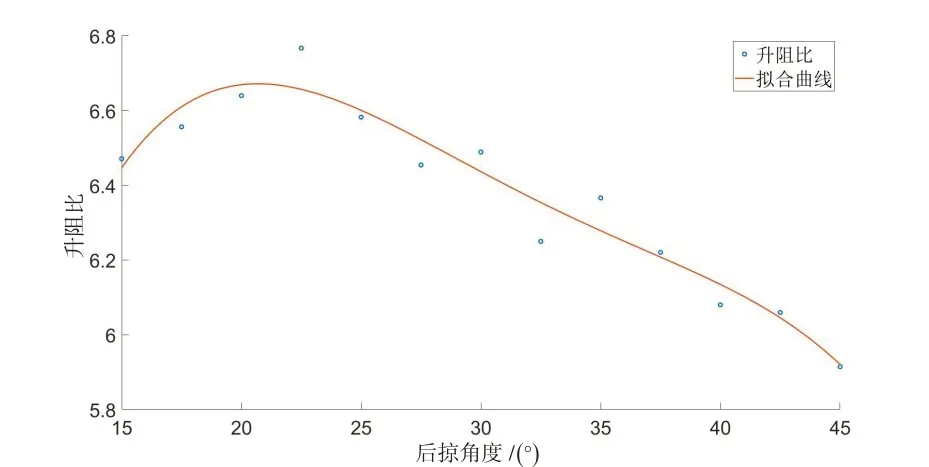
图5 4次多项式曲线拟合Fig.5 Fitting curve of quartic polynomial
同理,在飞行马赫数为0.6和0.8时,4次多项式依然能够较好地拟合升阻比在后掠角度变化时的趋势,因而,飞行器升阻比在不同前缘后掠角的拟合曲线确定为4次多项式。
根据所得曲线,可以确定该飞行器在飞行马赫数为0.4 时,曲线极值点为后掠角约为21°时获得,为6.67。在此后掠角下,当迎角为6°时,最大的升阻比为6.832。可以预测出该模型在不同速度、弹翼后掠角度下的飞行器后掠翼的最优后掠角度。
根据同样的方法,将飞行马赫数为0.6和0.8时的拟合值与仿真验证结果进行对比,如表4所示。
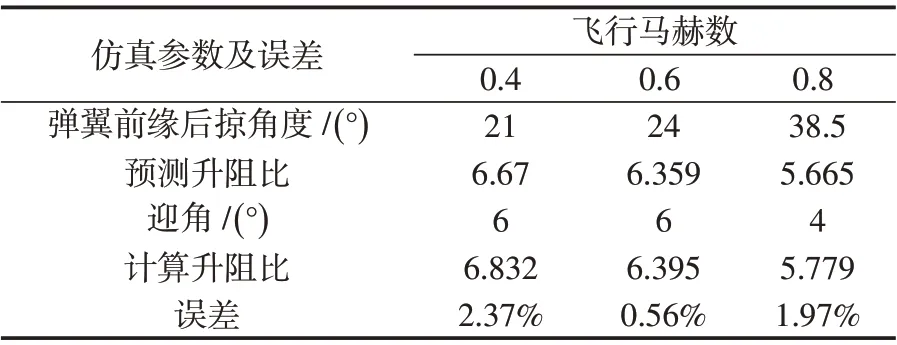
表4 仿真结果对比Tab.4 Comparison of simulation results and calculated values
从上述结果可知,将4 次多项式的拟合及仿真计算结果进行对比,可得在3 种速度下的误差均小于3%,说明4次多项式模型基本可以满足对后掠翼飞行器在不同速度下最优后掠角度的预测。
5 结论
本文基于1 种新设计的飞行器,探究了变后掠翼单速度最优后掠角变化规律,并通过仿真得到基于4次多项式的数学模型,可大致拟合该规律。经过验证预测模型所得最优后掠角与仿真计算值误差在3%以下。这种单速度模型相比于利用遗传算法等方式进行全局寻优更为简单,为单速度场景下变后掠翼后掠角控制率提供了理论上的数学模型参考。由于受实验场所和器材等因素限制,本文模型准确性仍须通过风洞试验实测才能得到最终验证。后续,将结合更复杂的曲面建模、深度学习等知识领域对变后掠翼控制规律做进一步研究。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
航空维修与工程(2021年3期)2021-04-12
西部论丛(2020年2期)2020-10-21
科学大观园(2019年10期)2019-09-10
证券市场周刊(2019年18期)2019-08-17
证券市场周刊(2019年19期)2019-05-27
中国经济周刊(2019年9期)2019-05-24
环球时报(2018-11-30)2018-11-30
小朋友·快乐手工(2015年5期)2015-06-06