井炮协同激发技术的研究与应用
2022-11-16 02:16许冠庆杜小龙王豪张帆
电子技术与软件工程 2022年16期
许冠庆 杜小龙 王豪 张帆
(东方地球物理公司西南物探分公司装备制造与服务中心 四川省成都市 610200)
随着国家能源战略部署逐渐落实,四川盆地油气资源开采力度逐年增大,勘探工作量逐年升高,相邻工区多作业队或同工区多作业队同时进行采集施工作业,逐渐成为常态。川渝采集区块炮点密集,障碍和干扰众多,协调难度大,采集时间窗口短、采集区域相互紧靠,这些因素严重制约了野外采集施工效率和质量。为了消除作业队之间同时施工相互干扰问题,保证资料质量,提出了井炮协同激发技术的解决方案。
1 现有施工方式存在的问题
1.1 多作业队同时施工现有施工方式
(1)分时段进行采集施工作业方式,如:A 队在20点‐21 点采集,B 队在21 点‐22 点采集,以此类推。
(2)实时沟通进行采集施工作业方式,仪器操作员通过语音或者视频等方式进行实时沟通,在一个作业队采集间隙,另一个作业队开始采集。
1.2 多作业队同时施工面临的问题
(1)施工时间浪费,采集效率低。
(2)采集时间重叠,资料相互干扰。
2 解决方案
为了消除作业队之间同时施工相互干扰问题,提高生产效率、保证资料质量,我们提出了井炮协同激发技术。该技术通过卫星授时将多台地震仪器的时间基准进行同步,然后按时间片划分激发窗口,控制在某一时间窗口内只能有一台地震仪器可以发送点火指令,实现井炮交替激发,实现流程见图1。
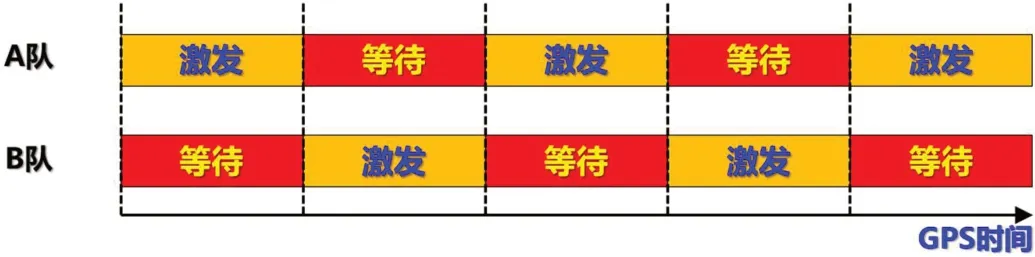
图1:地震仪交替激发流程
3 工作原理
3.1 系统组成
全部仪器系统包含GPS 北斗卫星、GPS/BD 授时器、数个控制器、428XL 地震仪器、编码器和电台等。GPS 北斗卫星与GPS/BD 授时器的GPS 信号接收端无线连接,单个GPS/BD 授时器的信号输出端与单个与之对应的控制器的GPS 信号输入端相连,数个控制器的时间基准线通过接收GPS 北斗卫星中的时钟进行同步。428XL 地震仪器的FO 信号输出端通过控制器的FO 信号通用I/O 端口与数字信号处理模块相连,数字信号处理模块与时间分片处理模块相连,时间分片处理模块通过控制器的FO 信号输出端与BOOMBOX 编码器相连;BOOMBOX 编码器与电台相连,见图2。
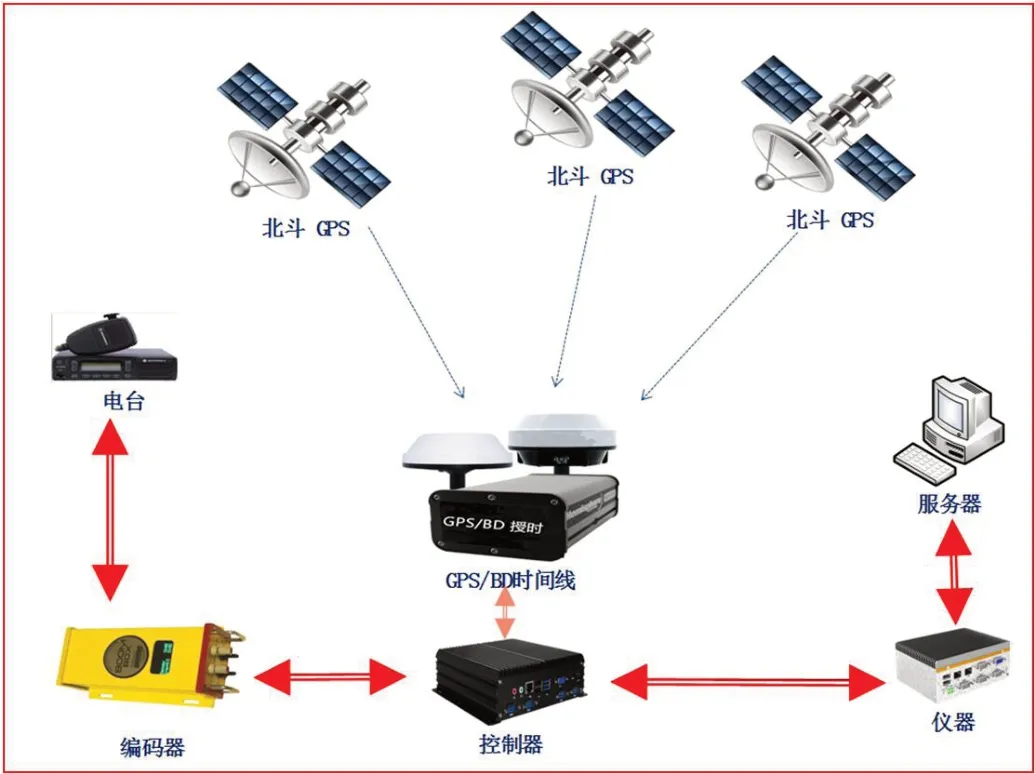
图2:仪器系统组成
3.2 卫星授时时间同步
随着地震勘探技术的发展,卫星授时技术已逐渐应用于地震仪器系统,它使得仪器系统内分布于不同地点的设备可以相互独立,但具有高精准的同步时间基准。井炮协同激发技术就是通过接收北斗或GPS 卫星时钟对多个控制器进行时间基准线同步,然后设置时间参数将时间进行分片处理。每一个作业队伍按照设置好的时间片依次轮流进行采集作业。
3.3 控制地震仪器发出的点火指令
为了能够控制仪器操作员放炮操作,通过在428XL 地震仪器与BOOMBOX 编码器之间加入源驱中控器,将地震仪器与编码器之间的点火指令FO 信息通道截断,分别连接到控制器的输入与输出端口,仪器将根据分配好的时间片自动选择接通或中断指令的操作。只有当轮到本作业队采集的时间片时才允许点火指令FO 信号发送出去,以达到控制的目的。
4 系统主要功能
应用井炮协同激发技术我们自主研发了一套井炮协同激发控制系统,该系统是一种配套地震仪器的辅助激发设备,适用于428XL 地震仪器和BOOMBOX II 遥爆系统的井炮采集激发,该系统主要包含自主开发的协同中控器和中控软件两个部分组成,有如下几项功能:
4.1 时间片设置功能
作业队可根据记录长度、排列激活时间、工区距离、目的层深度自主设置时间片的时间长度。时间片长度包括放炮时长和等待时长两个部分,设置等待时长时间一般与资料记录长度时间一致,操作员只能在放炮时窗内才能触发点火指令。
4.2 工作模式选择功能
井炮协同激发控制软件有分时受控模式和直通模式两种工作模式。当采集队伍之间不再相互干扰的时候,操作员可以在不改变外部连线的情况下通过软件直接把系统设置为直通模式,控制器将不再对点火指令FO 信号进行拦截,恢复到正常的采集模式中。
4.3 日志查看功能
协同激发控制软件有完整的日志查看功能。该日志可以记录操作员对协同系统软件的所有操作,如登陆人员信息、开机时间、模式切换时间、参数修改等情况,可供事后询查。
5 协同中控器的硬件设计
协同中控器的系统框图如图3 所示。该系统主要由以下几个部分组成:DSP 单片机、GPS 模块、FO 检测单元、信息存储单元、电源管理模块、人机接口模块、与PC 机通信模块等。
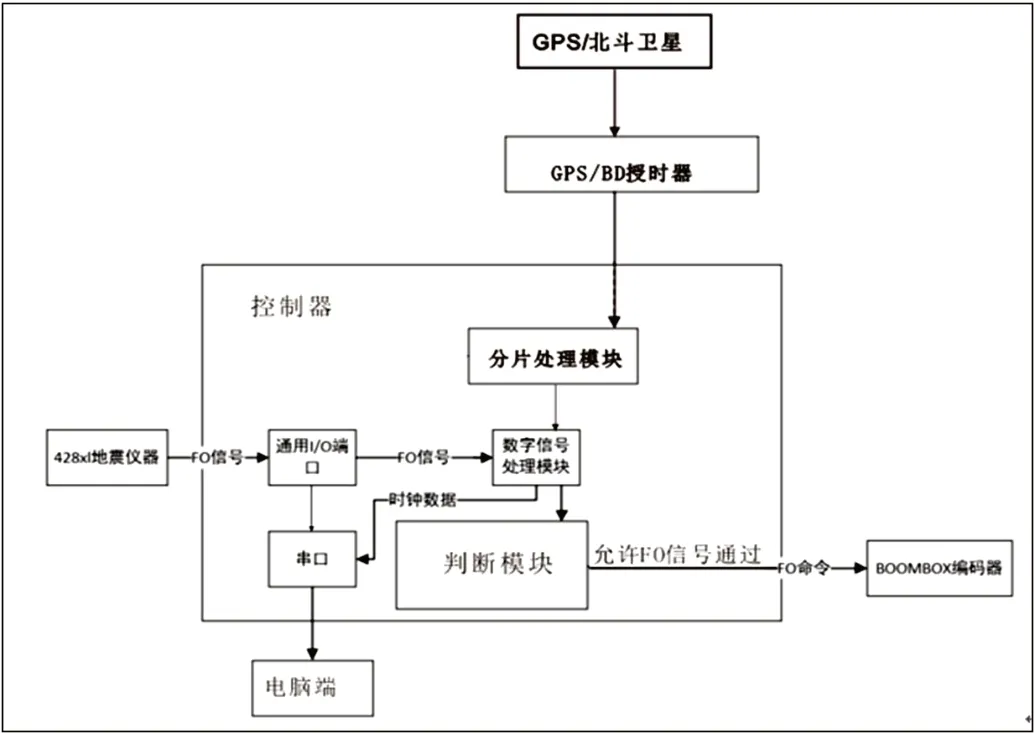
图3:源驱中控器系统框图
其中,FO 单元主要是用来检测LCI 发送的FO 信号;电源管理模块主要是给每个部分提供电源,USB 转串口完成数据上传,并通过PC 机对数据进行管理;GPS 模块主要提供绝对时间和参考秒信号;单片机最小系统完成系统的管理和调度。下面介绍部分单元电路。
5.1 DSP控制电路
本系统采用TMS320F28335PGFA 芯片此芯片具有高性能的静态CMOS 技术,指令周期为6.6ns,主频达150MHz;高性能的32 位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具备有统一的内存管理模式可以实现复制的算法,6 通道的DMA 控制器,片上256Kx16 的Flash 存储器,34Kx16 的SARAM 存储器。1Kk16OTPROM 和8Kx16 的BootROM,其中Flash,OTPROM, BootROM 均受密码保护。控制时钟系统具有片上震荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU 的输入时钟频率,故使用此CPU 作为系统的主控器件其电路。该电路由DSP最小系统组成。为了提高系统的抗干扰能力,在设计时,应该注意电源的去藕电容和数字地、模拟地的PCB 设计。为保存时钟稳定性,使用外部高精度晶振作为时钟源。
5.2 GPS模块
MAX‐M8 系列并行GNSS 模块建立在高性能的u‐blox M8 GNSS 引擎上,模块可以同时接收多达三个GNSS 系统(GPS/伽利略)和北斗或GLONASS)。MAX‐M8 模块可同时识别多个星座,在城市峡谷或微弱信号场景下提供卓越的时间精度。即使在低功耗的情况下也能提供高性能的时间数据。为了更好更快地改进定位计时,MAX‐M8 模块支持增强QZSS 和IMES 以及WAAS,MAX‐M8 模块支持消息完整性保护、地理围栏和欺骗检测,具有可配置的接口设置。为防止GPS 出现一次和不可用时,还设计了GPS 维持芯片,此芯片采用GPS 驯服晶振输出10MHz 信号经过10,000,000 次分频后得到1pps 信号,是UTC 时间基准的“复现”,同时正弦波信号相位严格同步于时钟频率信号,不受GPS 秒脉冲短时间随机跳变带来的影响,且具有智能学习算法,在驯服晶振过程中能够不断“学习”高稳晶振的漂移等特性,并将这些参数存入板载存储器中,当GPS 出现异常或不可用时,该产品能够自动切换到保持模式(Holdover mode),利用高效的智能保持算法,继续提供高可靠性的时间和频率基准信息输出,在短时间内保持较高的精度GPS 模块电路。GPS 模块主要是得到绝对时间信息,同时提供PPS 同步信号,PPS 对异地信号进行同步。
5.3 FO检测单元
FO 检测电路主要完成LCI 输出的FO 信号的检测,为保证FO 检测的准确性,设置使用主CPU 的外部中断IO 口进行检测,并使用最高中断优先级,保证检测的准确,为保护CPU 的检测IO 的安全,使用U11 光藕起隔离作用,以提高系统的稳定性。FO 检测电路如图4 所示。

图4:FO 检测电路
5.4 电源管理模块
电源管理模块如图5 所示。电源管理芯片采用的是Techcode 的TD6821M,它的主要特点有:高效的1.5MHz同步降压DC‐DC 稳压器,可分别提供高达1.5A 的输出电流。 TD6821M 工作在3V 到5.5V 的宽输入电压范围内,集成了RDS 极低(ON)的主开关与同步开关,以极大限度地减少导通损耗。电脑USB 能够输出5V 的稳定电源,故采用USB 供电。
图5:电源管理电路
6 协同中控软件设计
6.1 软件构成
协同系统软件设计主要包含协同中控器、协同激发系统二部分,如图6 所示,协同中控器开发包括,通用串行协议开发,GPS 驱动开发,FO 控制驱动开发,由于协同控制器CPU系统资源有限,不宜采用基于操作系统的程序设计模式,采用经典的基于前后台程序设计的应用程序开发模式。协同激发系统开发包括时隙驱动开发、通用串行协议开发、施工参数管理、以及界面开发。
图6:系统软件架构图
6.2 软件架构设计
运行环境:win10;
架构:C/S;
协同激发系统主要完成时隙控制,FO 状态控制功能,采集本地数据库模式,构建协同激发系统框架。
6.3 系统功能模块介绍及产品展示
6.3.1 系统主界面
如图7 所示。
图7:控制软件主界面
(1)界面上方为操作按钮选项,下方为当前系统信息。
(2)五个绿色按钮选项依次为:
启动系统、系统设置、用户管理、模式管理、浏览日志。
(3)主界面:包括工作状态(当前管理系统的状态)、北京时间以及工作模式。
6.3.2 系施工参数管理
项目设置:进行项目的添加、修改和删除的操作。
上方为操作项目,下方为项目列表界面。
(1)添加项目:点击绿色按钮即可进行项目的添加。在方框内输入相应的数据后点击“确定”即创建成功。
(2)更新项目:在项目列表界面中选中需要修改的项目后点击蓝色按钮,会弹出一个界面,在界面中将需要修改的数据修正后,点击“确定”即可。
(3)删除项目:在项目列表界面中选中需要删除的项目后点击红色按钮,即可完成删除操作。注意:点击删除按钮后所删项目依旧在项目列表中展示(实际已经被删除了),需要关闭当前“项目管理”界面,在主界面中再次进入“系统设置”,此时被删除的项目就不在项目列列表中了。
6.3.3 模式管理
进行不同模式之间的切换,在弹窗中选择对应所需的模式即可。
模式分为分时受控模式和直通模式。
分时受控模式:指不同的操作员在不同时间片中对设备进行控制,同一时间片仅允许一名操作员进行控制操作。
直通模式:对设备不进行分时控制,对操作员不进行约束。
7 推广应用
2020 年度四川盆地川中金堂—三台地区三维地震勘探项目南区、北区之间首次投入使用,用时22 天 ,两队平均一小时能分别采集150 炮左右。北区比计划提前5 天竣工,南区比计划提前2 天竣工。
2020 年度四川盆地蜀南地区观音场‐牟家坪二维潜伏构造地震勘探项目,一个队伍双仪器施工模式比计划提前2 天竣工。
2020 年度四川盆地川中金堂—三台三维项目南区、北区和秋林三维项目工区相邻,通过合理分配时间,实现了三个作业队同时施工,互不影响。秋林项目施工接近金堂‐三台项目时,255、213 队采用同步激发,中间位置的211 队采用异步激发,通过时间和空间双重分离,保证了三个作业队之间所有的井炮相互不受影响。三个项目同时施工共计39 天,北区比计划提前27 天竣工,南区比计划提前12 天竣工,秋林项目比计划提前22 天竣工。
通过以上项目使用,井炮协同激发控制系统得到充分验证,解决了作业队之间同时施工相互干扰问题,提高生产效率、保证资料质量,可全面推广使用。
8 结束语
井炮协同激发技术的推广应用,提高了勘探施工效率、避免了相互干扰、提高了资料品质,实现了地震探勘的提速增效。下一步我们将开展可控震源协同激发技术的研究,使协同激发技术在地震勘探施工中得到更加全面的应用。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
科学大众(2020年23期)2021-01-18
汽车观察(2019年2期)2019-03-15
百科探秘·航空航天(2017年12期)2018-01-31
中国卫生(2016年5期)2016-11-12
生物进化(2014年2期)2014-04-16
汽车与新动力(2012年1期)2012-03-25
空间控制技术与应用(2009年2期)2009-12-20