语音控制智能垃圾桶设计
2022-11-16 02:16陈铎卢元烁张幽彤
电子技术与软件工程 2022年16期
陈铎 卢元烁 张幽彤
(1.北京航空航天大学 北京市 100083 2.北京交通大学 北京市 100044)(3.北京理工大学 清洁车辆实验室 北京市 100081)
2019 年11 月27 日,北京市十五届人大常委会第16 次会议表决通过北京市人大常委会关于修改《北京市生活垃圾管理条例》的决定。修改后的《北京市生活垃圾管理条例》对生活垃圾分类提出更高要求,将于2020 年5 月1 日起施行。
针对于目前大众对于垃圾分类的需求和目前的痛点分析发现智能垃圾桶的需求日渐升高。在面对垃圾分类逐渐日程化的过程中,优化提升居民的垃圾分类便捷性是十分重要的。所以,智能垃圾桶的语音控制板块也变为了重中之重。作为中国人群组成不可或缺的高龄居民,对于智能化、语音化的垃圾分类是具有更高的需求的。所以,智能垃圾桶的革新和广泛推广是势在必行的。
1 智能语音分类垃圾的优势
在当今社会,垃圾分类主要是由人力或更为智能化的金属识别分类器。针对于人力来说,人工成本较为高,并且针对于职业的特殊性对于人才市场和人员筛选没办法做到快速补充。若保持大量采用人力资源作为垃圾分类的动力,垃圾分类和有效回收是无法做到的。相比而言,金属传感器似乎更加智能化,有效化。可是作为金属传感器的弊端也十分明显。类似于只能分别金属和非金属,对于垃圾分类的有效识别功能还是十分缺乏的。目前,对于市面上发现有针对于居家的语音识别垃圾桶技术可以解决这两点的弱势。针对于识别垃圾的种类甚至是细微的分类,并且针对于垃圾种类,在居民不知道是什么分类的垃圾时,进行指导,可降低人工成本和分类的力度以及准确性。类似于[2]《以 STM32 单片机为基础制作的智能垃圾桶》中提出的自动打扫功能。设计思路主要为根据语音识别模块识别信息,再转化为电信号,进入中控后以命令形式传出。最后执行电机驱动和智能打扫功能。在[3]《基于Arduino 控制器的校园智能垃圾桶设计》中,张园等发现有垃圾桶的垃圾分类和垃圾回收面临的问题还有一点就是于垃圾满溢问题。研究人员使用了超声波传感器模板对垃圾桶进行内部测定,内部垃圾高度以及垃圾重量进行系统的测量和进一步的计算。并采用GPRS 技术进行信号的传输。当垃圾满溢后,超声波信号传导到中控系统,中控系统再发出指令进行垃圾桶盖的合拢,使垃圾无法进入,并通报管理人员及时更换垃圾袋。[4]《基于语音系统的垃圾分类控制装置的设计》张艺蓝 金红在这篇文献的研究中,控制主板同样使用了STM32 单片机,而语音识别也是LD3320芯片,但不同于前文的通过红外识别传感器来激发LD3320的工作,此研究中采取了定时循环检测识别是否有语音输入,相对于红外识别系统可能会更简单,但耗能可能会有所增加。但该研究的整体的系统结构图十分清晰,原理明了。而在反馈机制中,此研究选用了JQ8400 语音播报模块和1.44TFT液晶屏进行语音和显示的双重反馈,反馈系统十分完善,可清晰地告知投放者的投放情况。
2 智能语音识别核心原理
本文所述的智能语音分类垃圾桶是基于Arduino 单片机和WEGASUN‐M6 语音识别模块设计和实现的,安装在垃圾桶桶身的麦克风感知语音控制信息,并反馈给WEGASUN‐M6 语音识别模块,语音识别模块一方面查表反馈垃圾类别,一方面与Arduino 单片机通信。Arduino 单片机控制底盘和桶身电机驱动底盘和垃圾袋夹运动。垃圾桶通过底盘运动接近用户,通过垃圾袋夹运动再四种垃圾的垃圾袋中打开正确的垃圾袋。
通过对国内的研究现状对比可发现:在语音智能垃圾桶的核心技术——语音识别芯片中,几乎所有研究中都运用到了LD3320 这一语音芯片,该芯片也是在语音识别领域精准、可靠性较高的一款,而在这一套系统的其他方面各研究的侧重点和不同设备的选择上均有所不同。
在主控板的选择上部分选用了STM32,而部分则选择了Arduino。Arduino 是一个开源的电子开发原型平台。其包含硬件开发板和软件IDE 和各种开发生态。所以Arduino是一个集合了硬件和软件的综合体。而STM32,可以先简单的理解为,ST 意法半导体,基于ARM Cortex‐M 系列的单片机。其实这两者本身并不具有直接对比性,所处的维度不同。但当两者均形成一个简单综合体后,可在一些方面进行简单对比。在硬件开发板,市面上售卖的通常是现成的Arduino 开发板,虽然它也有很多的扩展板和传感器模块供二次开关,但是仍然在一个固定的硬件基础上。至于STM32 的话可以设计各种各样的开发板,而对于Arduino 而言,开发上手相对容易,因为Arduino 对硬件底层做了很多的封装,尤其适合新手入门。各种配套教程也很系统,上手简单。STM32 的话需要做准备工作比较多,需要自己搭建硬件和软件结合,对C语言要求也比较高,入门比Arduino难。但是掌握之后,灵活多变,也可以适应各种各样的应用场景。总而言之,两者的选择依据研究者的主要侧重目的和研究维度而定,在不同维度下二者各有利弊,均可在语音控制智能垃圾桶中使用。
3 语音识别唤醒系统原理
在众研究中,语音指令的识别原理都大致相似,但在反馈机制、细节优化上又都各具特色。在关于唤醒语音识别系统的方式中,《基于语音识别技术的智能分类垃圾桶》的采用传感器控制Arduino UNO R3 开发板的休眠与唤醒。HC‐SR501 的信号输出端与Arduino UNO R3 开发板相连。当传感器未感测到在2m 范围内有扔垃圾者靠近垃圾桶时,传感器输出低电平,各模块处于休眠状态,LED 灯不亮;当传感器感测到有扔垃圾者靠近时,传感器输出高电平,各模块启动,LED 灯点亮。当扔垃圾者完成垃圾投放离开后,传感器再次输出低电平,各模块关闭,LED 灯熄灭。该模式可有效保护Arduino UNO R3 开发板,延长其使用期限。而在《基于语音系统的垃圾分类控制装置的设计》采取了定时循环检测识别是否有语音输入来唤醒,此模式更加简单,但可能系统部分元件的使用寿命会收到影响。但两种唤醒方式的适用范围有所差异,须基于不同地区垃圾桶的使用频率进行不同安排,以便达到资源的最有效使用。同样,在系统识别语音信息后给与投放者的反馈信息的方式也存在异同,有的研究方案中的反馈机制只是垃圾桶是否打开,而其余则以语音播报或者屏幕显示的方式给与投放者回应。在这几种方式中,屏幕和语音播报的双重反馈机制的反馈效果最好,可以让投放者清晰地知晓自己语音的识别结果,但在设计和成本上肯定有相应困难,而只以垃圾桶盖的打开与否进行反馈可能会误导投放者辨别是否已唤醒投放系统,不利于及时的反馈检修。而语音播报的但反馈方式先阶段使用较普遍,具有低成本、高效率的特点。
4 设计方案
4.1 整体结构与工作流程
本文设计的智能语音分类垃圾桶包括机械结构、硬件结构。如图1 显示了装置的工作流程。
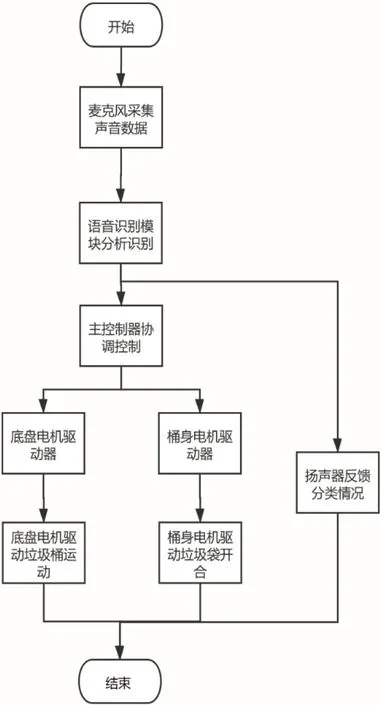
图1:装置工作流程
主要模块功能如下:
语音识别模块:分析处理音频的电信号,向主控制器(Arduino 单片机)传递分析结果,内置垃圾分类数据表,根据语音信息和数据表归类垃圾,控制扬声器输出提示语音。
主控制器(Arduino 单片机):与语音识别模块通信,控制电机驱动器,给予电机控制器使能、方向、速度信号。如图1 所示。
4.2 机械结构设计
关键零件选型。
4.2.1 底盘电机选型
因考虑到智能垃圾桶需满足可行进,可移动到使用者身边的功能,故需选用底盘电机。底盘电机用于驱动整个垃圾桶行进,考虑到本装置体积较大,满载时重量较大,根据实际需求,本次选用15W 直流有刷减速电机,并选择低速大扭矩模式。电机在满载时有15gf*cm 扭矩和31r/min 的转速,可以满足垃圾桶的驱动需求,具体参数如表1 所示。
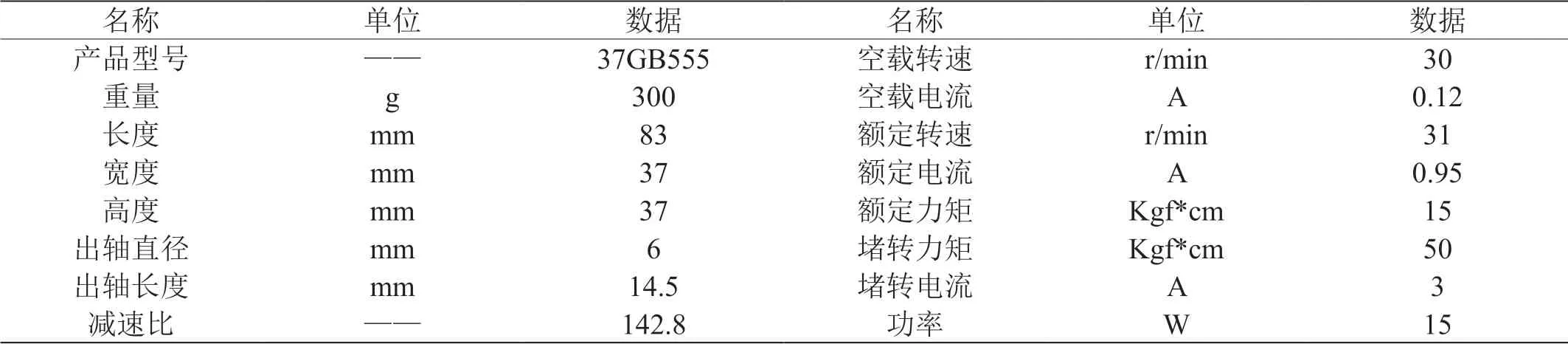
表1:直流减速电机技术参数
4.2.2 桶身丝杆电机选型
在针对于垃圾桶的设计过程中,需要带有可选择性开关所需分类垃圾袋的功能,所以选择使用丝杆电机作为结构的必要。垃圾桶设计中,垃圾袋需要通过横杆加持,并通过横杆的直线运动带动垃圾袋的开合。这一运动过程需要300mm 左右的行程,足够的动力和精确的控制。综合考虑成本因素和扭矩输出需要,桶身丝杆电机采用42 直线步进电机。丝杆步进电机可也便捷地将转动转化为直线运动,还适合精确控制速度和位置。表2 中列举了电机的技术参数。

表2:42 丝杆步进电机技术参数
4.2.3 底盘结构设计
为避免启动时的冲击造成垃圾桶向后倾倒,底盘结构采用前轮电机直驱的驱动形式。各轮与各轴固连,通过螺纹螺母固定;轮与底盘木质结构之间使用轴承连接;轴与电机使用联轴器连接;各木质零件之间通过木工胶和射钉连接。对于底盘的需求还有一点就是尽量要大,或者整体重心保证符合在一定加速度条件下不会发生倾倒。
4.2.4 垃圾袋开合夹持机构设计
为同时加持垃圾袋和移动垃圾袋开口,采用了横杆加持垃圾袋配合滑轨和丝杆电机的结构。垃圾袋用夹子夹持在相邻两横杆上,当丝杆螺母与横杆通过部件固连一起直线运动时,横杆随之运动,夹带着垃圾袋的横杆分别向两侧打开,完成打开一个垃圾袋的功能。为协助垃圾分类,方便垃圾投递,每次投递垃圾时仅打开一个垃圾袋。
具体传动过程为:42 丝杆电机驱动丝杆转动——丝杆带动丝杆螺母直线运动——丝杆螺母与横杆通过杆件固连一起直线运动——横杆夹持垃圾袋,将部分横杆移动至最左端,部分移动至最右端,即可完成“仅打开一个垃圾袋”的功能需求。
4.2.5 桶身外形设计
为满足不同场景使用者的需求,设计了两款智能垃圾桶。分别是具有科技风的现代外观和充满自然气息的原木风格设计。前者给人先进,潮流的感觉,后者则是带领人欣赏自然的风光,亲近于原始森林。
4.3 硬件电路设计
4.3.1 Arduino 单片机
微控制器是装置的核心,对整个硬件系统的运行情况起着决定性的作用。本装置采用Arduino Mega2560 作为系统主控制器。Arduino Mega2560 是采用USB 接口的核心电路板,具有54 路数字输入输出,适合需要大量IO 接口的设计。处理器核心是ATmega2560,是8 位单片机,同时具有54 路数字输入/输出口(其中15 路可作为PWM 输出),15 路模拟输入,4 路UART 接口,一个16MHz 晶体振荡器,一个USB 口,一个电源插座,一个ICSP header 和一个复位按钮。Arduino Mega2560 相比于其他控制系统有着优秀的程序可读性、便捷友好的入门难度和丰富的社区资源等优点,并且成本价格实惠,且整体性价比高,受到广泛的应用。
4.3.2 WEGASUN‐M6 语音识别模块
相比于众多研究中采用的LD3320 芯片,在此设计中运用了WEGASUN‐M6 语音识别模块。语音信号处理与反馈是本装置设计的重点和难点,也是本装置的亮点所在。为保证识别效果和设计进度,选用型号为WEGASUN‐M6 的语音识别模块。该模块集成了语音识别和语音输出功能,通过配置合适的麦克风和扬声器,可以对远达5m 的语音信号给予正确识别,可以记忆2000 句识别词条,操作便捷、串口丰富,通讯顺畅。该模块识别能力基本满足本装置语音识别需求,作为重要的控制单元选入硬件系统。
4.4 系统硬件电路设计
图2 为本装置电路图,硬件系统包括24V 电源、DC‐DC 降压模块,语音控制模块,麦克风、扬声器一体模块、Arduino 单片机、步进电机驱动器、步进电机、继电器、直流电机。其中麦克风、扬声器、电机作为执行单元,功能简单明了。电源由两组12V‐2800mAh 锂电池包串联形成,为两电机供电。DC‐DC 压降模块将24V 电源电压降为5V,为语音控制模块和Arduino 单片机供电。继电器和步进电机驱动器隔离高压和低压电路,同时接受单片机信号以控制电机。
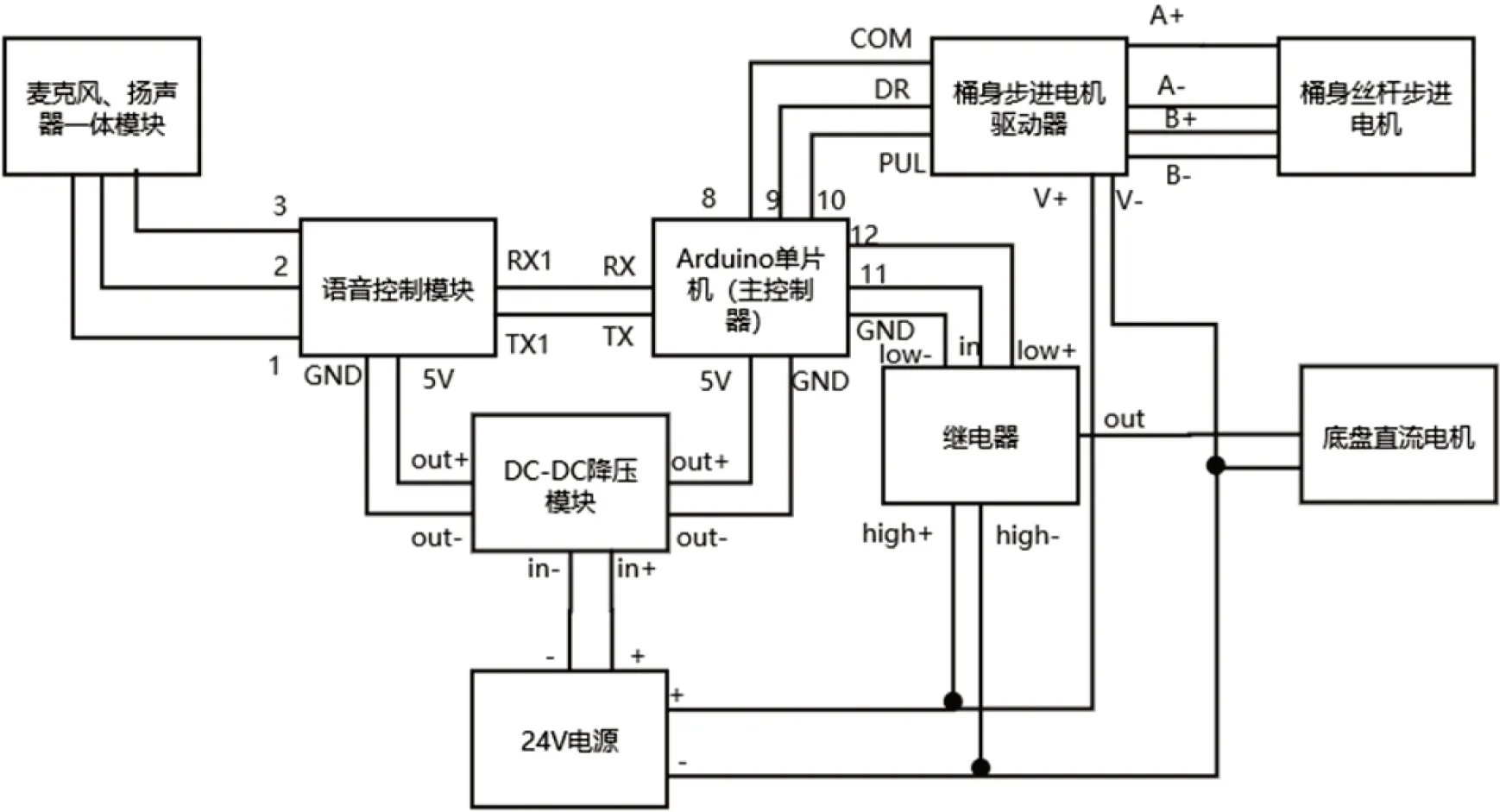
图2:垃圾桶电路设计
4.5 结论
4.5.1 智能垃圾桶系统总体设计
针对于目前垃圾分类的需求愈发严重之时,设计了一款具有语音识别,移动,指引人们分类投放垃圾的智能垃圾桶。对于的设计来说,要满足于使用者分别为两个方面:移动以及识别分类投放垃圾。针对于此两点需求分别设计了移动板块和语音识别板块。通过对于前文的图标所示的设计进行进一步优化。总体上以语音输入——分析信息——输出指令——作出声音反馈——作出行为反馈为模板,进行了基于Arduino 单片机的整体设计。
4.5.2 智能垃圾桶机械和电气结构方案设计
通过对于只能垃圾桶功能的需求,分别在底盘,桶身,桶盖几方面分别进行结构的设计和选用。在底盘,选用15W直流有刷减速电机,并选择低速大扭矩模式,电机在满载时有15gf*cm 扭矩和31r/min 的转速,可以满足垃圾桶的驱动需求。而在桶身,着重进行了丝杆电机的选择。因为丝杆电机是实现分别开关垃圾袋的关键,丝杆步进电机可也便捷地将转动转化为直线运动,还适合精确控制速度和位置。
4.5.3 电气结构方案设计
而针对于电气结构方面的设计,选用Arduino 单片机以及WEGASUN‐M6 语音识别模块。在上文中论述过Arduino单片机的优势。而选用此语音识别模块的原因便是该模块集成了语音识别和语音输出功能,通过配置合适的麦克风和扬声器,可以对远达5m 的语音信号给予正确识别,可以记忆2000 句识别词条,操作便捷、串口丰富,通讯顺畅。
在电路图的设计上,按照功能设计了相应的结构。在硬件方面功能不受影响的尽可能减少桶身占有面积,使垃圾桶更美观,所以选择了上述的硬件电路图,在语音输入模块主要为独立的结构,可防止无用信号以及杂音的干扰。
总而言之,各研究的侧重点均有不同,每个研究中的闪光点和特点都对后续研究有较大指导意义,同样也表现出不同特点和方式的智能垃圾桶的适用范围均有不同。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
大灰狼画报(2022年2期)2022-05-23
小读者(2022年21期)2022-02-10
有色金属材料与工程(2021年4期)2021-11-27
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
橡塑技术与装备(2021年2期)2021-02-01
发明与创新·大科技(2018年2期)2018-03-17
乐活老年(2016年11期)2016-12-03
制造技术与机床(2012年6期)2012-01-27