
基于神经网络的异步电机直接转矩控制中的定子电阻辨识研究
2022-11-16 02:00周桂珍陈志鹏王志敏雷大军
安阳工学院学报 2022年6期
周桂珍,陈志鹏,李 锐,陈 科,王志敏,雷大军
(湘南学院 电子信息与电气工程学院,湖南 郴州 423000)
0 引言
矿井输送机因运输能力强,距离远被广泛运用于大中型矿井运输中。目前,矿井输送机主要采用以直接转矩控制(DTC)的异步电动机为主[1]。直接转矩控制只需唯一的定子电阻就可观测出定子磁链,具有转矩响应速度快、鲁棒性好等优点。但定子电阻受定子温度、电流等影响具有非线性、时变特点[2]。电机高速运行时,定子电阻变化对磁链观测可以忽略,但电机低速运行时定子电阻的变化将直接导致磁链观测不准确,电机转速转矩脉动大。输送机在低速运转时状态严重影响煤矿的安全生产。因此低速时对定子电阻进行辨识是提高系统性能的关键。
目前,定子电阻辨识方法主要有模型参考自适应方法(MRAS)[3]、信号注入法[4]、卡尔曼滤波法[5]、最小二乘法[6]、智能控制方法[7-8]等。基于以上各方法的优缺点,本文设计了一种基于BP神经网络对定子电阻进行辨识方法,该方法能实现电阻的高精度辨识,并有效减小了电机在低速运行时的转矩脉动。
1 直接转矩控制原理
异步电机在两相静止坐标系(α,β)下的数学模型如下[9],转矩方程为:

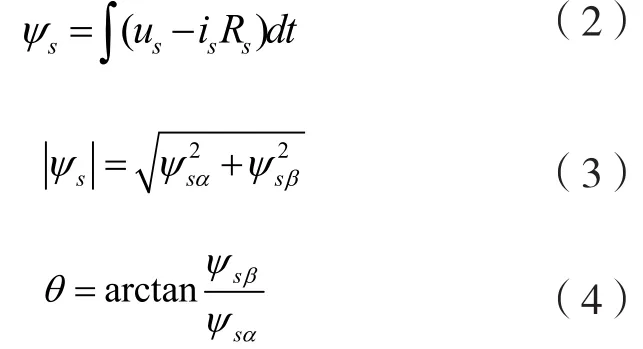
定子磁链方程为:
电机转速方程为:

其中,ψsα,ψsβ为定子磁链ψs在(α,β)下的正交分量;isα,isβ为定子电流is分量;θ为磁链位置角;p为电机极对数;Rs为定子电阻;J为转动惯量常数;TL为负载转矩。
直接转矩控制原理结构如图1所示。由定子磁链与电磁转矩估计值与给定值误差和磁链位置角θ,选择最佳电压空间矢量实现电机直接转矩控制。

图1 直接转矩控制原理结构图
由式(2)可知,定子磁链观测的准确性与定子电阻直接相关,电机低速运行时定子电阻的变化导致直接转矩控制系统的性能,因此需对定子电阻进行辨识。
2 BP神经网络定子电阻辨识设计
2.1 转速推算
将式(3)代入式(5)有:
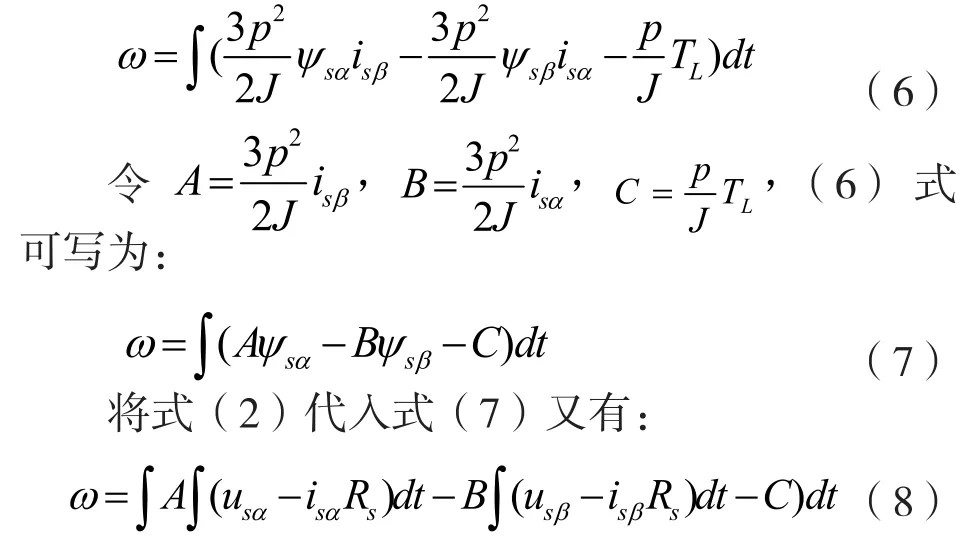
由转速计算式(8)可知,电压、电流分量可测量获得,仅由定子电阻Rs影响转速的准确率。若系统中光电码盘测出电机实际转速为ω',则两者差为:

若e = 0,则转速计算值为准确值;若e ≠ 0,表明定子电阻变化引起转速计算误差。
由(8)式可知,转速ω与定子电阻Rs存在严重耦合关系,由于BP神经网络的非线性映射能力及自学习特性在解决非线性、不确定性系统辨识问题中具有极大优势,因此本文选择BP神经网络对定子电阻进行辨识。
2.2 BP神经网络结构与算法
当选择合适的隐含层节点数,3层结构的BP神经网络就能实现高精度的非线性逼近效果。因此本文选择常用的3层BP神经网络,其结构如图2所示。
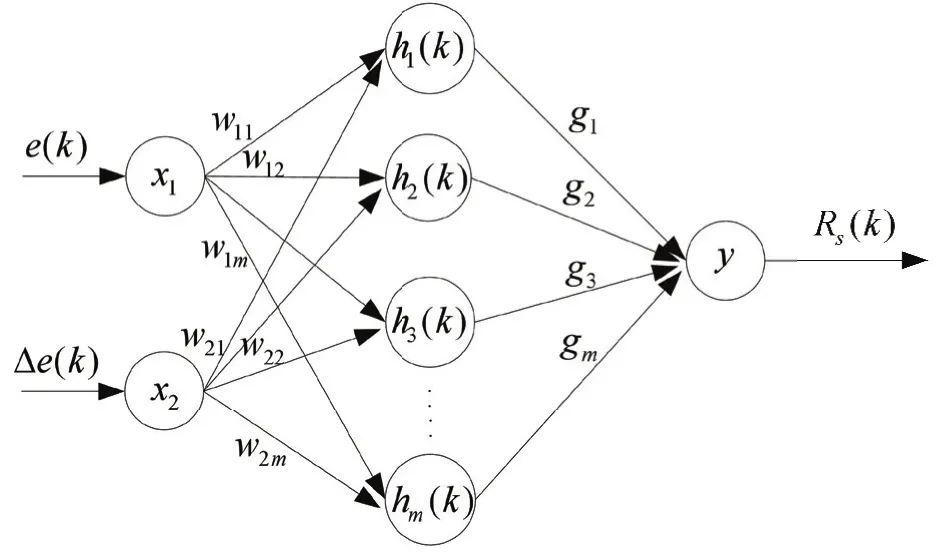
图2 BP神经网络定子电阻辨识结构图
图2中,输入节点数为2,对应为转速误差e(k)和误差变化量Ve(k),表达式为:

网络输出层输出为:

隐含层输出为:

基于BP神经网络的定子电阻辨识直接转矩控制结构如图3所示。
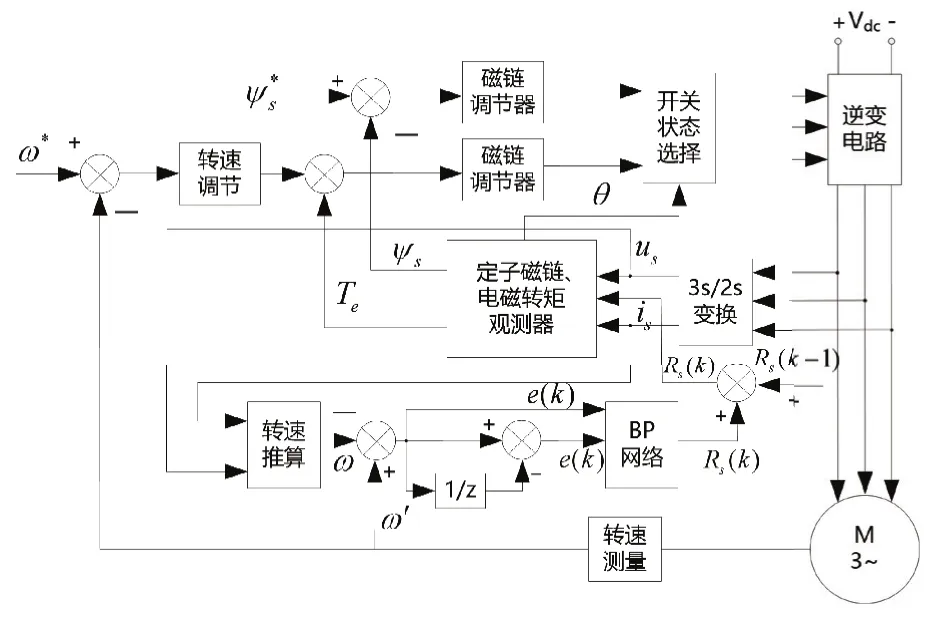
图3 BP神经网络定子电阻辨识直接转矩控制结构图
2.3 BP神经网络算法
由图3可知,BP网络输出为定子电阻变化量VRs( k),该值加上前一时刻定子电阻估计值Rs( k-1),即得出当前时刻定子电阻的估计值Rs( k),该值作用于被控对象定子磁链与转矩观测器,并将测量转速与推算转速之差返回给BP网络。
此处采用梯度下降算法对BP网络权值进行在线训练,采用整个系统的测量转速与推算转速误差均方对BP网络进行训练,不再使用BP网络的实际输出和期望输出误差训练网络[10]。最小化目标函数为:

各权值迭代公式为:


3 仿真分析
电机参数为fN=50Hz,UN=380V,定子电阻Rs=1.85 Ω,转子电阻Rr=2.658 Ω,定子绕组电感Ls=0.294 1H,转子绕组电感Lr=0.289 8H,极对数p=2,互感Lm=0.283 8H,转动惯量J=1.128 4 kg.m2。用来训练BP网络的定子电阻变化曲线如图4(a)。
由图4(a)可以看出,定子电阻初始值为1.85 Ω,0.2 s后定子电阻随着温度升高匀速升高,在0.8 s增大为初始值的2倍并保持不变,在1.2 s后定子电阻随温度降低也随之降低到初始值。
图4(b)、图4(c)和图4(d)分别为电机转速54 r/min,给定负载转矩为20N.m定子电阻未辨识情况下的定子电流、电磁转矩和定子磁链波形。综合图4可以看出,当定子电阻在0.2 s~1.7 s之间变化时,定子电流和电磁转矩大小也随之发生相应变化。
现对定子电阻进行辨识。依据式(10)和(11),选择不同的转速和负载采集所需样本数据,对BP网络进行训练,得出网络的初始权值和结构。本BP网络采用2-8-1结构,即2个输入节点,8个隐含层节点,1个输出节点。图5即为采用BP网络对定子电阻辨识的结果图。由图5(a)可以看出,经辨识后的定子电阻与实际定子电阻变化曲线误差相差不大,表明本文设计的BP网络对定子电阻具有较好的辨识效果。由图5(b)、(c)、(d)与图4(b)、(c)、(d)比较可看出,经过电子电阻辨识后,定子电流、电磁转矩及定子磁链的波动明显改善。仿真结果表明,本设计使直接转矩控制系统在低速运转时性能得到提高。
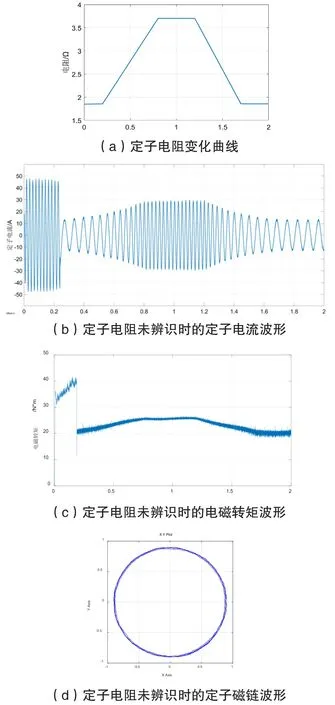
图4 定子电阻未辨识情况
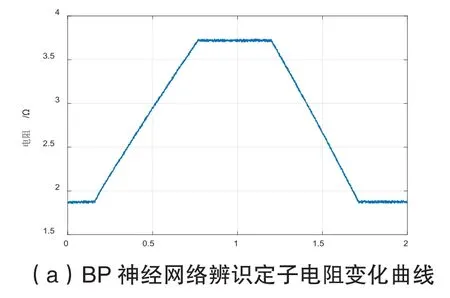
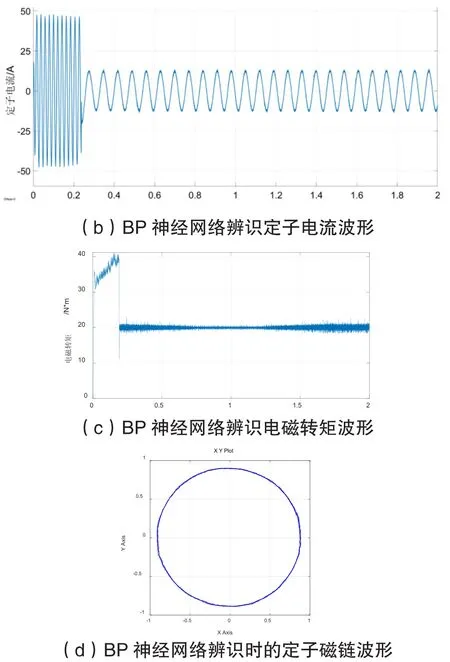
图5 BP网络辨识定子电阻各参数波形
4 结语
本文根据电机低速运转时定子电阻变化得出的转速推算值与实际测量转速误差,设计了基于BP神经网络的定子电阻辨识器,从而获得准确的定子磁链观测值,电机定子电流和电磁转矩的波动显著减小。该方法对定子电阻辨识精度较高,系统响应速度较快,直接转矩控制系统低速运转时性能得到改善。
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制学报(2022年6期)2022-07-15
电机与控制应用(2022年4期)2022-06-27
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2022年2期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
通信电源技术(2016年1期)2016-04-16
