智能汽车自动驾驶的控制方法分析
2022-11-17 13:16钱勇
农机使用与维修 2022年11期
钱 勇
(淮安生物工程高等职业学校,江苏 淮安 223200)
0 引言
智能汽车是集计算机控制、人工智能决策技术、辅助驾驶技术等一体化控制系统,是传统汽车智能化升级,显著提高了汽车驾驶技术智能化、舒适化及安全性,是目前世界汽车产业的研究重点与发展热点。目前,很多发达国家已经将智能汽车自动驾驶技术纳入智能交通发展的重要组成部分[1]。
智能汽车自动驾驶技术的开发与应用是保障车辆安全运行的重要条件,可以弥补人为驾驶、自主判断过程中的观察不到位、观察失误等因素,保证车辆的安全运行,提高车辆驾驶的安全性与舒适性。根据世界汽车工程协会的预测,在21世纪末期,预计世界范围内智能汽车的保有量将占据汽车总数量的81%左右[2],其发展速度正在超越新能源汽车的发展,预计在2025年智能汽车将逐渐进入人们生活。
1 智能汽车自动驾驶技术
1.1 智能汽车自动驾驶技术内涵
智能汽车的自动驾驶技术主要是以计算机控制技术为核心,以车联网技术为支撑,基于环境感知技术,根据预设的车辆运行轨迹指定汽车驾驶的控制决策,通过车辆的横向、纵向控制系统,保证车辆按照预设轨迹运行,在汽车运行期间,可以根据车身周围环境感知,实现车速调节、车道变换、超车避让等基本操作[3]。
1.2 智能汽车自动驾驶技术发展意义
1.2.1 提高汽车驾驶舒适性
智能汽车的发展可以缓解驾驶员的驾驶疲劳,使汽车驾驶员在驾驶过程中,尤其是长途驾驶过程中,从繁重、重复、单一、枯燥无聊的驾驶任务中解放出来,通过提前设置好汽车运行轨迹集目的地,可以让汽车按照预设的运行轨迹进行自动驾驶,提高汽车驾驶的舒适性。
1.2.2 提高汽车驾驶安全性
智能汽车驾驶中的汽车环境感知技术可以全方位监控汽车运行过程中的环境状况,弥补人为驾驶中的监测失误,减少汽车交通事故的发生概率,当智能汽车自动驾驶技术完全成熟并大范围普及之后,可以有望实现交通事故零发生,缓解交通压力,提高汽车驾驶过程中的安全性。
1.2.3 提高社会智能化进程
智能汽车的发展可以推进社会进步,推动社会中的各个行业逐渐向智能化发展。如智能汽车的自动驾驶技术可以对汽车路径进行合理规划,减少交通拥堵,合理的路程规划还可以减少驾驶里程,进而减少汽车长时间驾驶及堵车过程中的燃油消耗,缓解汽车产业对燃油等不可再生资源的消耗及环境污染,促进社会资源可持续发展。
2 智能汽车自动驾驶系统组成及工作原理
2.1 智能汽车自动驾驶系统组成
智能汽车自动驾驶系统主要由智能驾驶系统、生活服务系统、安全防护系统、位置服务系统、车道保持系统、自动停车系统、紧急制动系统、自适应巡航系统等组成(表1)。
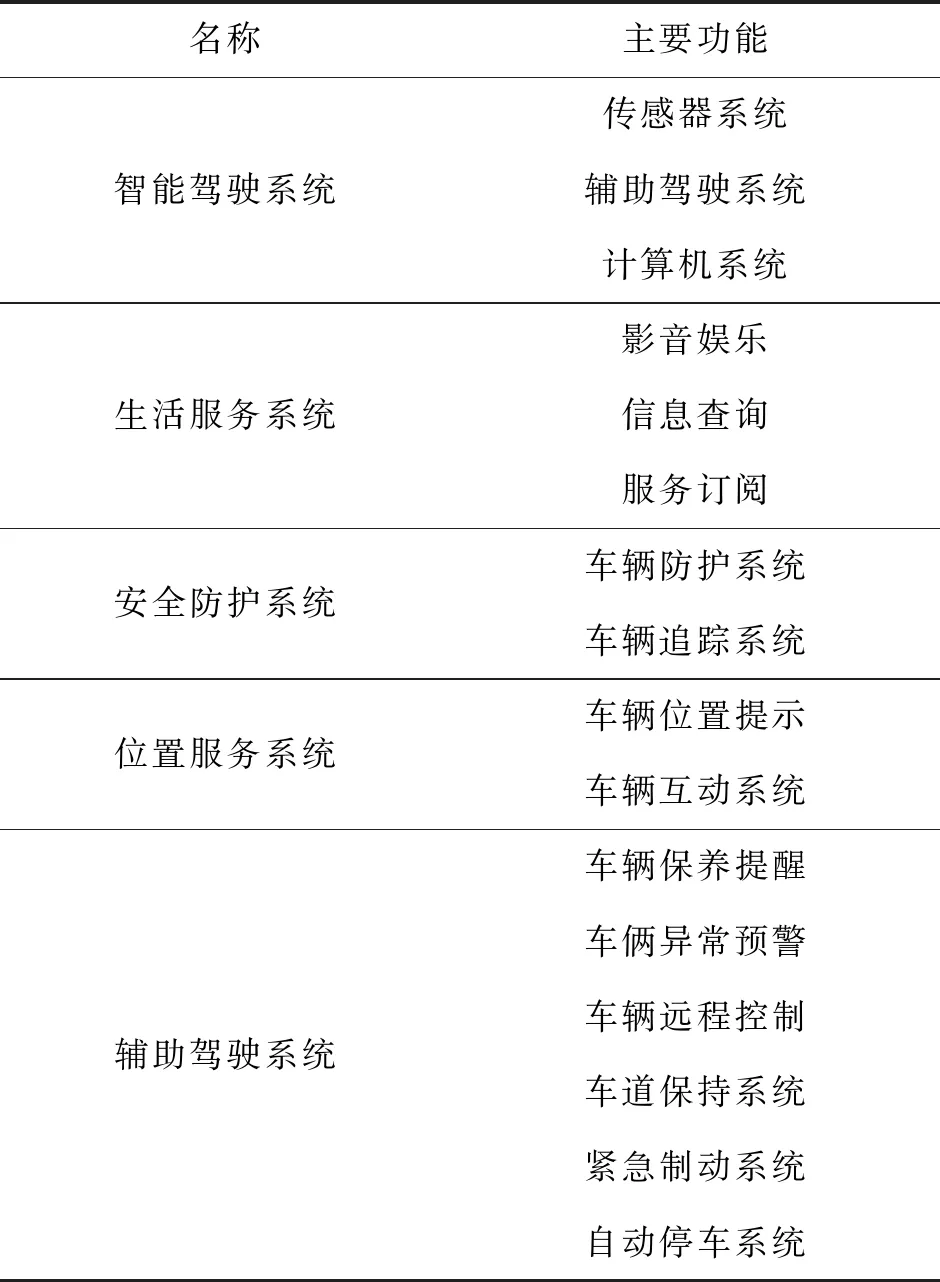
表1 智能汽车自动驾驶系统组成示意图
2.2 智能汽车自动驾驶工作原理
在进行智能汽车自动驾驶时,首先通过汽车车身的传感器设备、雷达装置及车联网技术等对外界环境进行信息获取,然后基于智能汽车的控制技术与控制方法对外界多级信息进行综合分析,根据预先设计的驾驶目标进行汽车驾驶路径规划,最后进行智能汽车的控制执行,在汽车驾驶过程中对汽车制动、避让、变道、转向、超车等调节车速与车辆行驶方向,全程保证汽车的安全驾驶与稳定运行[4]。
2.3 智能汽车自动驾驶核心技术
智能汽车自动驾驶技术的核心主要包括环境感知技术、车辆控制技术。环境感知技术是无人驾驶汽车行驶的基础,车辆控制技术主要包括横向控制技术及纵向控制技术。横向控制技术主要是对汽车驾驶过程中的汽车转向、角度调整等进行控制;纵向驾驶技术主要是针对车辆的驱动及制动进行控制。
2.3.1 环境感知技术
智能汽车环境感知技术相当于汽车行驶的“眼睛”,主要包括车载摄像头、毫米波雷达、激光雷达、超声波雷达等,其中,以车载摄像头应用最为广泛。环境感知技术主要是对汽车驾驶过程中的外界环境信息进行获取与处理,目前,智能汽车环境感知技术正在向多个传感器相互协同发展,可以弥补单一传感器的相关缺陷(表2),提高环境感知技术的精度与可靠性,增强汽车驾驶过程中的环境适应能力,对汽车周围环境进行更加全面的分析。
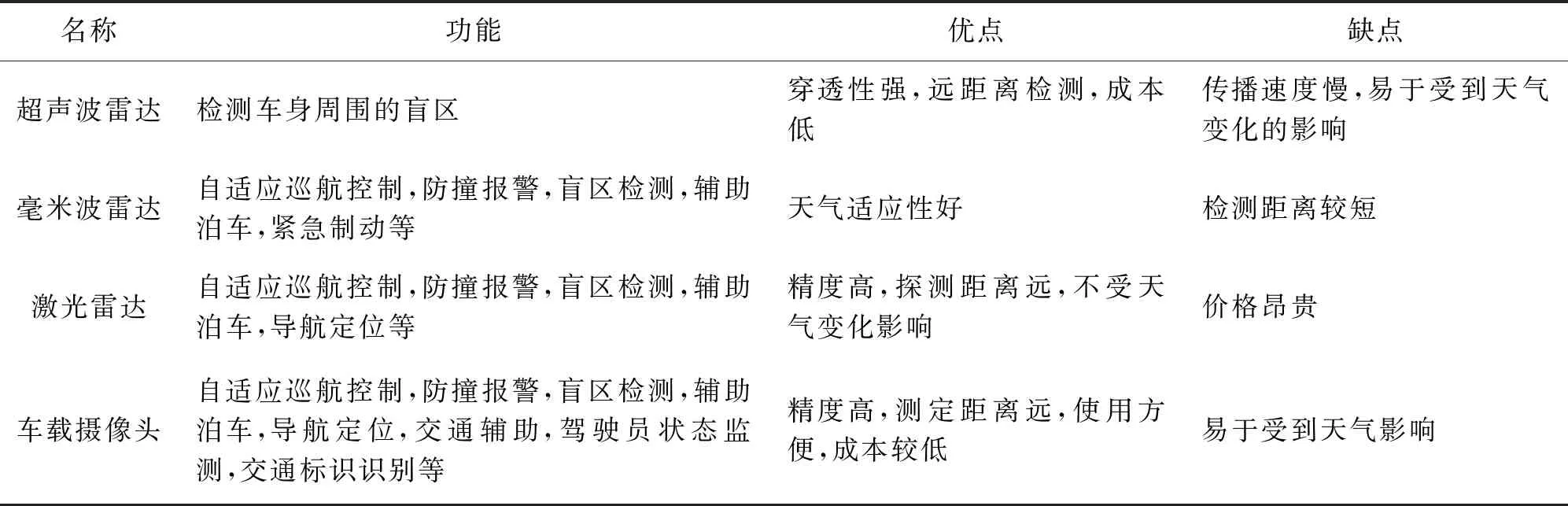
表2 智能汽车环境感知技术传感器概况
2.3.2 横向技术
智能汽车自动驾驶技术横向控制主要是对汽车行驶过程中的转向系统、传动系统、制动系统和刹车系统等进行控制,基本原理如图1所示。在进行车辆横向控制时,首先对汽车行驶过程中的车辆位置信息、外界环境信息、目标路径信息等进行采集,然后对多级信息进行处理与转换,依据采集的信息及时调整汽车的转向控制量,主要包括横摆角速度、车辆侧偏角、侧向-垂向-纵向加速度等参数,最后将执行参数信息传递给整车控制器进行执行与驱动。

图1 智能汽车横向控制技术基本结构
2.3.3 纵向技术
汽车纵向驾驶技术主要是针对车辆的驱动及制动进行控制,对汽车的发动机、传动装置及制动系统进行控制[5],控制流程如图3所示。
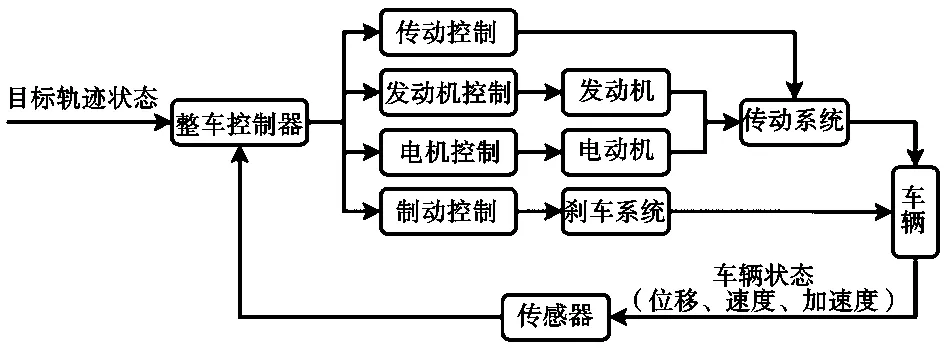
图3 智能汽车纵向控制技术基本结构
3 智能汽车自动驾驶的控制方法分析
3.1 PID 控制方法
PID 控制方法是一种传统的自动驾驶控制方法,是一种最简单、应用最为广泛的自动驾驶控制方法。占据自动控制技术的85%以上,只适用于基本线性、非动态控制系统,不能满足实际汽车驾驶的要求。
3.2 模糊控制方法
汽车自动控制模糊控制方法不需要复杂的建模过程,可以极大简化模型的复杂性,主要是基于人类相关生活经验进行推理,模拟人的大脑进行复杂事件的处理,提高系统控制精度与效率。
3.3 神经网络控制
神经网络控制方法是目前应用最为广泛的控制方法及理论之一,目前主要利用卷积神经网络(Convolutional neural networks,CNN)来帮助控制智能汽车更加平稳、安全、快速运行,主要是通过安装在汽车上高速摄像装置对汽车前场景拍照,通过建立卷积神经网络,以拍摄照片作为输入,以车辆的控制(如汽车转向、方向盘转角、车速等)作为输出。
3.4 深度学习方法—特征提取与模型拟合
智能汽车的最终目标是实现无人驾驶,在减少人的参与甚至是没有人的参与的条件下,保证智能汽车自动驾驶的安全性与稳定性,特征提取与模型拟合主要包括特征的选择与归一化处理,是神经网络方法中的重要环节之一,可以提高预测的精准度。
4 结论
智能汽车是集计算机控制、人工智能决策技术、辅助驾驶技术等一体化控制系统,显著提高了汽车驾驶技术智能化、舒适化及安全性,是目前世界汽车产业的研究重点与发展热点。预计在2025年智能汽车将逐渐进入人们生活中。本研究针对目前智能汽车自动驾驶系统的组成及工作原理进行分析,针对目前现有的智能汽车自动驾驶技术的控制方法进行分析,包括传统控制方法与只能控制方法等,并分析各种方法的特点及优势,未来为了提高神经网络在智能汽车自动驾驶控制中的适用性和鲁棒性,应该加强智能汽车在恶劣环境下的应用研究,研究智能汽车自动驾驶中的时变性、不确定性和非线性研究,同时加强多运动变量的耦合与研究。研究结果为智能汽车的自动驾驶技术的发展提供技术参考。
猜你喜欢
学生天地(2020年5期)2020-08-25
电子制作(2019年19期)2019-11-23
电子制作(2019年7期)2019-04-25
电子测试(2018年10期)2018-06-26
汽车博览(2016年9期)2016-10-18
照明工程学报(2016年3期)2016-06-01
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
交通建设与管理(2015年15期)2015-03-20
海军航空大学学报(2015年4期)2015-02-27