小料称量系统的建模与速度控制
2022-11-22 09:09苏州工业职业技术学院王熙雏安徽国风塑料建材有限公司刘邦树
内江科技 2022年10期
◇苏州工业职业技术学院 王熙雏 安徽国风塑料建材有限公司 刘邦树
本文论述了一种混料机的小料称量系统的建模与速度控制过程,通过对系统各部分进行分析,推出其系统结构框图,并对框图中各环节建模。由于称量过程的速度控制是由PLC内部的PID参数决定的,本文对速度控制进行了仿真,实现了PID的各个参数的整定,解决了称量速度与称量精度之间的矛盾。
混料机称量系统的称量过程是一个闭环控制系统,即输出端以一定方式返回到输入端,并影响输入端控制的一种控制关系,这就需要通过反馈才能实现这一目的。称量系统过程控制是一个重量负反馈的闭环控制系统且是一个恒值控制系统,当配方、速度等输入量被设定后,正常生产过程保持不变,重复这些输入量时,系统的输出量要求在一些允许的误差范围内基本保持恒定;如果根据要求,输入量需要调整,那么调整后,要有一个新的恒值输出与其对应。不过在控制过程中会出现一些扰动量,如飞行量等,它的变化是随机的,所以输出量也要与之对应做相应的变化。本文将从三个方面来分析:①系统结构框图分析;②对各单元建模;③针对速度控制进行仿真。
1 系统结构框图
1.1 系统结构框图的原理
同开环控制系统相比,闭环控制增加了反馈通道,在闭环控制系统中,因为外部扰动或系统内部变化所引起的被控制量的偏差,就会产生相应的控制作用去自动纠正。因此,它具有抗干扰、精度高、稳定性强的优点。但引入反馈回路同时也增加了系统的复杂性,而且增益选择不当时系统就不稳定,这给设计和制造系统带来许多困难,闭环系统主要用于要求高而复杂的自控系统中。对称量系统小料秤的过程控制进行分析,得出其结构框图,如图1所示,r(t):输入量;e(t):偏差信号;b(t):测量值;p(t):控制量;q(t):执行量;f(t):扰动量;y(t):输出量。当系统因为内外的干扰而使输出量y(t)偏离设定值时,控制单元将根据偏差进行反馈控制,因而提高系统控制精度。

图1 小料秤系统结构框图
1.2 系统框图各单元功能
小料秤结构框图中各单元功能如下:①给定信号单元:由PC机和PLC预先输入具体的配方、速度、速度的分切点等参数,系统启动后将产生相应的输出。②控制器:由PLC和变频器组成,PLC比较各种信号后进行程序处理,驱动变频器,将电流信号变换成相应的频率(电压)信号来驱动执行单元工作。③执行单元:主要由调速电机、减速箱、螺杆组成,由PLC和变频器共同控制。④控制对象:主要是秤体,它输出物料的质量G并通过测量单元反馈到输入端。⑤测量单元:此单元体现的是一个反馈环节,主要由传感器与A/D转换器组成,传感器把G转换成电压U,再通过A/D转换,变换成数字量反馈给PLC。⑥扰动量:即引起被控量变化的各种因素,如飞行量、振动等。
2 系统建模
要有效控制系统,必须要定量、准确地分析系统的结构、参数与动态性能,弄清楚各物理量之间的关系,而建立这种关系的定量表达式,就称为建模。这些数学表达式如微分方程、差分方程、传递函数、代数式、频率特性等都被称之为数学模型。由于称量系统中小料秤、主料秤的自动控制系统相似,本文将重点分析小料秤系统结构框图中各环节的工作原理,并对其建模。
2.1 变频器
变频器的功能是将PLC输出的电流信号转换成相应的频率(电压)信号,从而驱动电机运行。由于变频器工作时两端呈现非线性,所以为了更方便地调整参数,在实际使用时,尽量将变频器工作在其线性特性范围内。现有系统在程序设计中,将PLC的输出电流量程控制在4~20mA,变频器工作范围控制在0~100Hz,且成线性关系。设变频器的实际工作特性的代数关系式为:f=k(I-4),由于4~20mA与0~100Hz间成线性关系,所以求得k=6.25,即变频器的代数关系式为:

变频器是采用开环控制,实际工作中,对应不同的螺杆和原料,k值可能有些小的变化。
2.2 减速箱
由于电机的转速决定于60f/p,且采用减速箱能增大起动转矩,故系统采用减速箱来增大电机与螺杆间的速度比。
减速箱电机侧和螺杆侧的速度和转矩存在下列关系:n2=n1G1/ G2; T2=T1G2/ G1。n1、G1、T1分别为减速箱电机侧的转速、齿数和转矩;n2, G2, T2分别为减速箱螺杆侧的转速、齿数和转矩。而减速箱的齿数之比为40,所以减速箱的速度代数关系式为:

即传递函数G2(S)=N2(S)/N1(S)=1/40,是比例环节。
2.3 调速电机
变频器根据不同的频率来控制调速电机,使之产生相应的速度驱动减速箱和螺杆,从电机铭牌上可知以下额定参数:U:220~240△/380~415Y,n1:1380r/min,f:50Hz,电机的极对数p=2,则电机的同步转速n=1500;电机的转差率s=(n-n1)/n=0.08;则电机的实际转速的代数式为:

即传递函数为G3(s)=N(s)/F(s)=27.6,是个比例环节。参考有关资料,求得1/0.0067s2+0.1s是调速电机的数学仿真模型。
2.4 秤体
螺杆卸下的物料由秤体收集,并测出其重量G,即固体输送率Q→秤体→重量G。秤体的代数式G=ρ∫Qdt,ρ-物体的密度,两边微分再拉氏变换得:

传递函数为G4(S)=G(S)/Q(S)=ρ/S,是一个惯性环节。
2.5 传感器
传感器的功能就是将秤体上的重量G(kg)转变成易于处理的电压信号U(mV),再传递给A/D转换器转变成数字信号。由于称重传感器的工作特性为线性,则输出电压U与G满足以下关系式U=K(G+W),其中K是比例系数,W是皮重,根据实验数据代入关系式可求得K=0.0656,W≈196Kg,所以

最后可应用固体输送理论对小料秤计量螺杆进行分析并建模。由于篇幅有限,螺杆的建模这里不再赘述。
3 速度控制仿真分析
3.1 PID控制
对速度的控制将直接影响系统的称量精度和良性运行,系统是根据PLC程序中预先设定的参数驱动变频器,再由变频器驱动螺杆调速电机来控制速度,本文将应用Simulink软件对电机速度的控制进行仿真。Simulink软件适应面广、仿真精细、贴近实际,提供一个动态系统建模、仿真和综合分析的集成环境,故在控制理论和数字信号处理的复杂仿真和设计中被广泛应用。一个典型的Simulink模型包含以下三个元素:①信号源模块;②被模拟的系统模块;③输出显示模块。在具体运行中本系统的速度控制可以随时更改,然后按此速度运行,所以信号源采用单位阶跃输入;速度仿真的系统模块包括PID控制,变频器和调速电机;系统输出显示模块采用示波器显示输出。
由于PID控制器简单易懂,参数易于调整、使用中不需要精确的系统模型、技术成熟等特点,所以其是目前应用最广泛的控制器。PID控制器由比例单元(P)、积分单元(I)和微分单元(D)三个部分组成,其控制算法的表达式为:

上式中积分的上下限分别是0和t,因此它的传递函数为:

式中:u(t)-输出信号;e(t)-输入信号的偏差;Kp-比例系数;T1-积分时间常数;TD-微分时间常数。
称量系统中的小料称量和主料称量速度的控制是决定称量精度的重要环节,螺杆,齿轮箱调节起来相对容易,而速度的控制调节起来比较抽象和复杂。PLC是利用其闭环控制模块来实现PID控制,从而实现对速度的控制,基于PID的速度控制简图如图2表示。

图2 基于PID的速度控制简图
3.2 仿真控制
若不加PID控制器,系统的仿真模型图如图3所示:其中0.1u+4是PLC系统中过渡算法,由前面的建模分析可知变频器的数学模型是6.25u-25,u仅是一个中间变量,调速电机的数学模型是1/0.0067s2+0.1s。

图3 无PID控制的Simulink仿真模型图
如图4所示,当无PID控制时,发现系统的阶跃响应仿真曲线会产生超调,并且响应滞后,效果不理想。
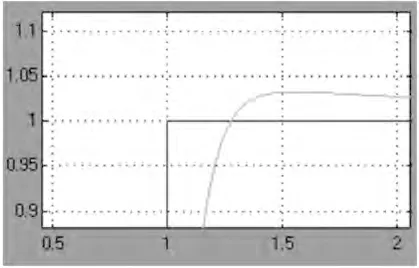
图4 无PID控制的阶跃响应仿真图
当加入PID控制器后,怎样对PID参数进行整定就成为了控制系统设计的核心,它是根据被控过程的特性来确定PID控制器的参数。实际应用中,大多是通过凑试法来确定PID参数,在凑试时,参考各参数对系统控制过程的影响,实行先比例、后积分,再微分的参数整定三步骤。本系统的PID参数整定步骤如下:①整定比例部分:设定PID的积分时间常数T1=0.01;微分时间常数TD=15。可得其仿真模型如图5所示:从小到大逐步增大比例系数K,通过反复仿真,观察其响应仿真图,得出K在7000~10500之间时,系统响应快,超调小,比较稳定。若再增大K值,系统超调变大,产生振荡,稳定性变坏。②整定积分部分:设定微分时间常数TD=15;比例系数K=10000。由大到小取不同的T1,通过反复仿真,观察其响应仿真图,系统都比较稳定,超调量小且响应快,由此得出T1的取值范围对系统输出响应没有大的影响。③整定微分部分:设定PID的积分时间常数T1=0.01;比例系数K=10000。由小到大取不同的微分时间常数TD,通过反复仿真,观察其响应仿真图,可得出TD在 13~16间系统稳定性好,超调很小,响应很快,效果令人满意。在此范围外响应慢、有振荡、超调大、不稳定,仿真效果都不理想,图6为K=10000,TD=15,T1=0.01的响应仿真图,效果十分理想。
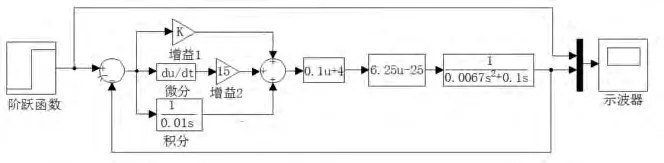
图5 有PID控制的Simulink仿真模型图
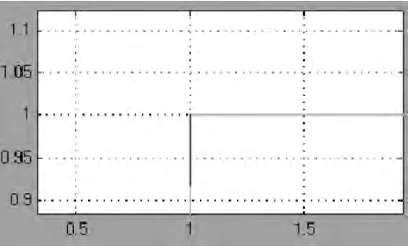
图6 有PID控制的阶跃响应仿真图
以上是用凑试法来实现速度控制的PID参数整定过程,先比例、后积分,再微分。假设三个参数中两个不变,改变另外一个参数的数值,通过反复仿真,观察响应图,确定各个参数的取值范围。实际工程中,三个参数都要统筹兼顾。
4 结束语
本文对称量系统的各部分进行了定性和定量地分析,推出其系统结构框图,并对框图中的各环节建立数学模型,考虑到称量过程中的速度控制是一个难题,对速度控制进行了仿真,实现了PID的各个参数的整定,为实际工作中系统程序参数的设定和改进提供了一定的理论参考,同时也解决了称量速度与称量精度之间的矛盾,并且本文所研究的结果通过实际应用,效果良好。
猜你喜欢
消费电子(2022年6期)2022-08-25
橡塑技术与装备(2022年4期)2022-04-27
商品与质量(2021年43期)2022-01-18
防爆电机(2021年3期)2021-07-21
防爆电机(2020年3期)2020-11-06
汽车维修技师(2019年7期)2020-01-16
活力(2019年22期)2019-03-16
电子制作(2019年23期)2019-02-23
汽车维修技师(2018年11期)2018-05-11
科技与创新(2017年11期)2017-07-01