
车辆不同悬架系统的建模仿真分析
2022-11-23 07:19董明丰
汽车实用技术 2022年21期
董明丰
车辆不同悬架系统的建模仿真分析
董明丰
(西华大学 汽车与交通学院,四川 成都 610097)
文章以1/4车辆悬架为研究对象,根据动力学原理建立车辆被动和主动悬架二自由度振动模型的微分方程。在MATLAB/Simulink中搭建路面激励模型和车辆二自由度悬架模型并进行仿真分析,对比分析了主动悬架和被动悬架对于车身加速度、悬架动挠度、车轮动载荷等指标的影响。结果显示,主动悬架能更好地降低车身加速度,平顺性能优于被动悬架系统。研究主动悬架系统对于改善车辆乘坐舒适性、操纵稳定性具有重要意义。
车辆悬架;平顺性;仿真分析;路面激励模型;二自由度悬架模型;MATLAB/Simulink
车辆行驶时,路面的不平度及发动机、传动系统的振动都会使车辆发生振动。汽车的平顺性是指汽车在行驶过程中所产生的振动和冲击,使人感到疲劳,甚至损害健康,或者使货物受损的性能。因此,平顺性主要是依据乘员主观感受的舒适性来评价,对于货车还包括保持货物完好的性能,平顺性是现代汽车的重要性能之一。
路面的不平度和车速共同组成了车辆振动系统的“输入”,之后通过轮胎、悬架等质量、弹簧、阻尼元件进行传递,得到系统的“输出”,即簧上质量的加速度,此加速度是影响乘员舒适性的主要因素,也是评价汽车平顺性的重要指标。
1 二自由度1/4车辆动力学模型
由于本文主要研究车辆垂向运动,为方便分析问题,将悬架模型简化为1/4车辆悬架二自由度模型。简化过程作如下假设:
(1)忽略簧上质量2的变形。
(2)忽略车轮的阻尼力。
根据以上假设,可以把车辆振动系统简化为图1所示的二自由度模型。
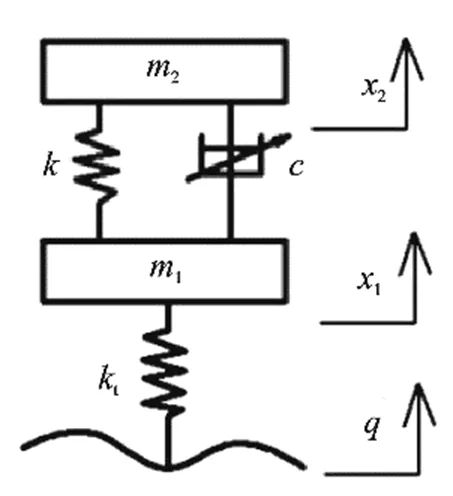
图1 车辆二自由度振动模型
图中,1为车轮质量;2为车身质量;t(tyre)为车轮等效刚度;为悬架等效刚度;为悬架等效阻尼,1为车轮位移;2为车身位移;为路面激励。
1.1 被动悬架系统模型
根据牛顿第二定律可得到被动悬架二自由度振动系统微分方程为

根据式(1)微分方程组,在MATLAB/Simulink中搭建被动悬架系统仿真模型,如图2所示。
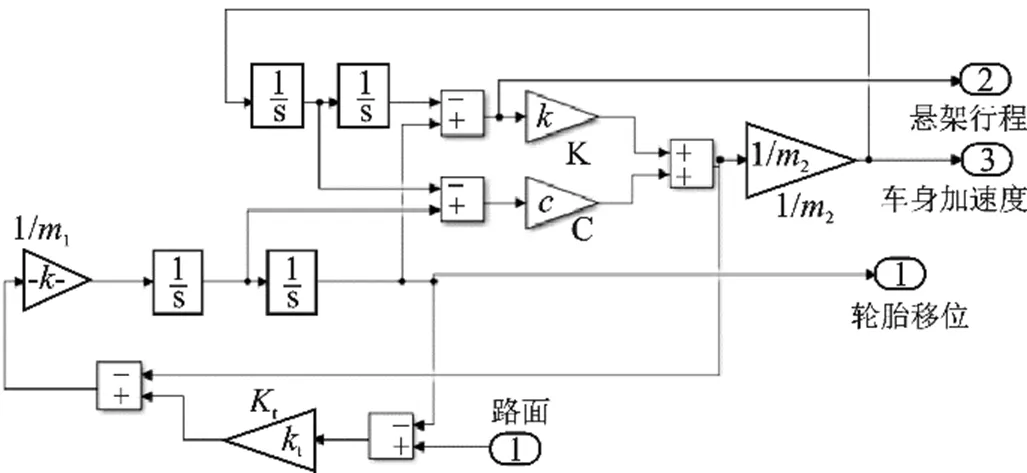
图2 车辆二自由度被动悬架仿真模型
2 路面激励模型
根据GB 7031—86《车辆振动输入路面平度表示方法》中规定的路面功率谱密度的拟合表达式,本文采用滤波白噪声作为路面输入模型[1],即

式中,0表示下截止频率0.01;表示路面不平度系数,对于B级路面,=6.4∙10-5;表示车速,取仿真速度为=17 m/s;()表示高斯白噪声信号。
路面激励仿真模型如图3所示,得到的路面激励如图4所示。
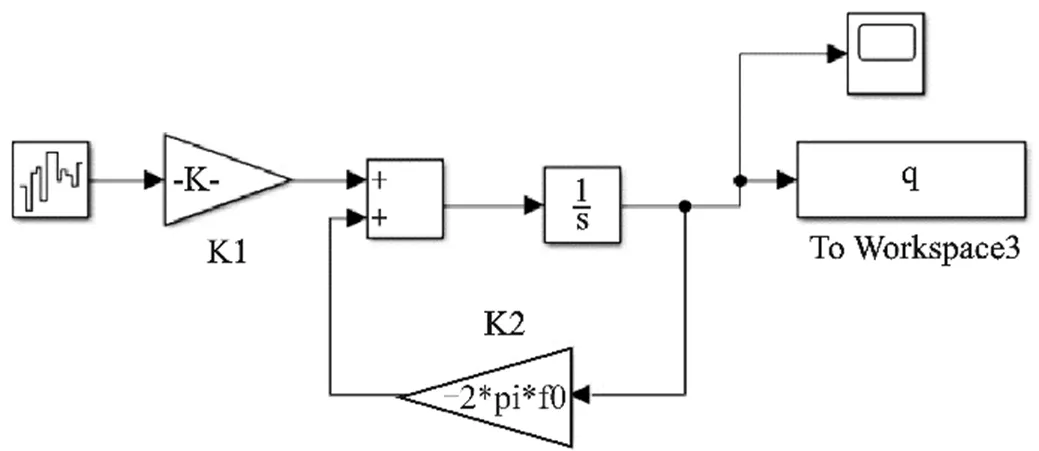
图3 路面激励仿真模型
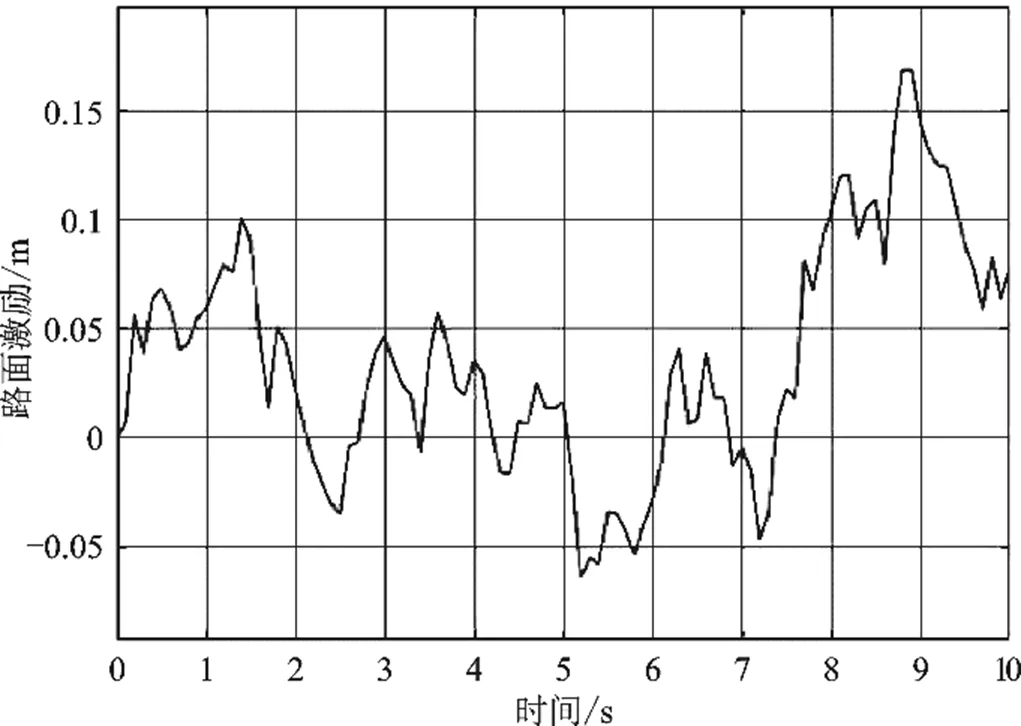
图4 B级路面激励信号
3 主动悬架系统模型
传统的被动悬架设计,对路面适应能力低,难以兼顾平顺性与操作稳定性的要求,相对于被动悬架,主动悬架理论上可以更好地满足车辆的平顺性要求,提高车辆的综合性能,因此,主动控制的研究对车辆综合性能提高有重要意义。
主动悬架二自由度振动系统模型图如图5所示[2],系统通过把车身加速度信号输入电子控制单元(Electronic Control Unit, ECU),ECU经过处理后产生力矩信号指令发送到发生器,发生器产生控制力作用在悬架系统上。
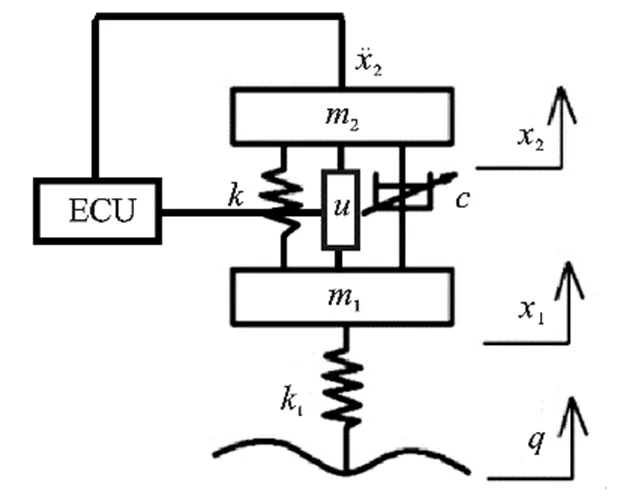
图5 主动悬架二自由度振动系统模型
根据牛顿第二定律可得到主动悬架二自由度振动系统微分方程为

PID(Proportional Integral Derivative)控制也称为“比例、积分、微分”控制。PID控制是迄今为止应用最广泛、普遍和成功的经典控制策略。由于PID控制算法结构简单、鲁棒性强、可靠性佳、适应性好,在工程中有着极为广泛的应用[4]。
依照PID控制的控制逻辑与算法算式,可以在 MATLAB/Simulink 环境下搭建出相应的PID控制器。再结合式(3)微分方程组,在MATLAB/ Simulink中搭建出主动悬架系统仿真模型[5],如图6所示。
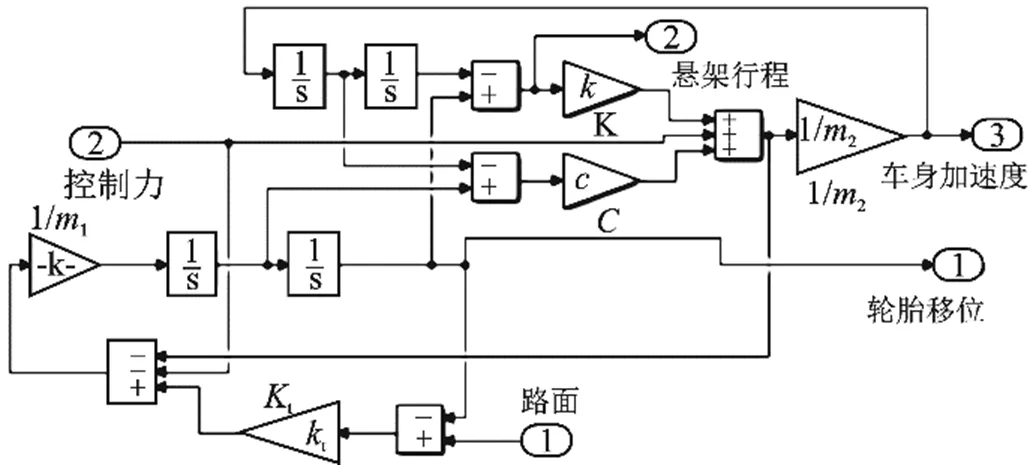
图6 主动悬架二自由度系统仿真模型
4 仿真分析
悬架系统参数如表1所示。
表1 悬架系统参数表
项目参数 车身质量m2/kg500 车轮质量m1/kg40 车轮等效刚度kt/(N/m)240 000 悬架刚度k/(N/m)16 000 悬架阻尼系数c/(N∙s/m)1 500
评价车辆平顺性的指标主要有车身加速度、悬架动挠度、车轮动载荷三方面。本文就针对这三个指标分别对比被动悬架和主动悬架的仿真结果,如图7—图9所示。
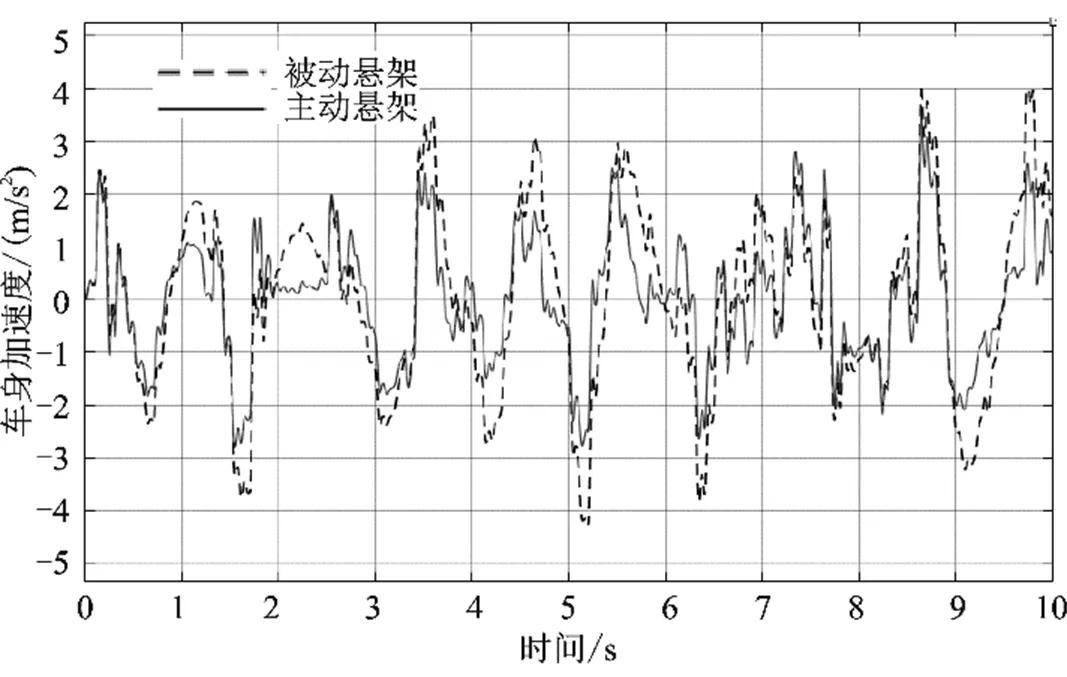
图7 车身加速度仿真结果对比分析
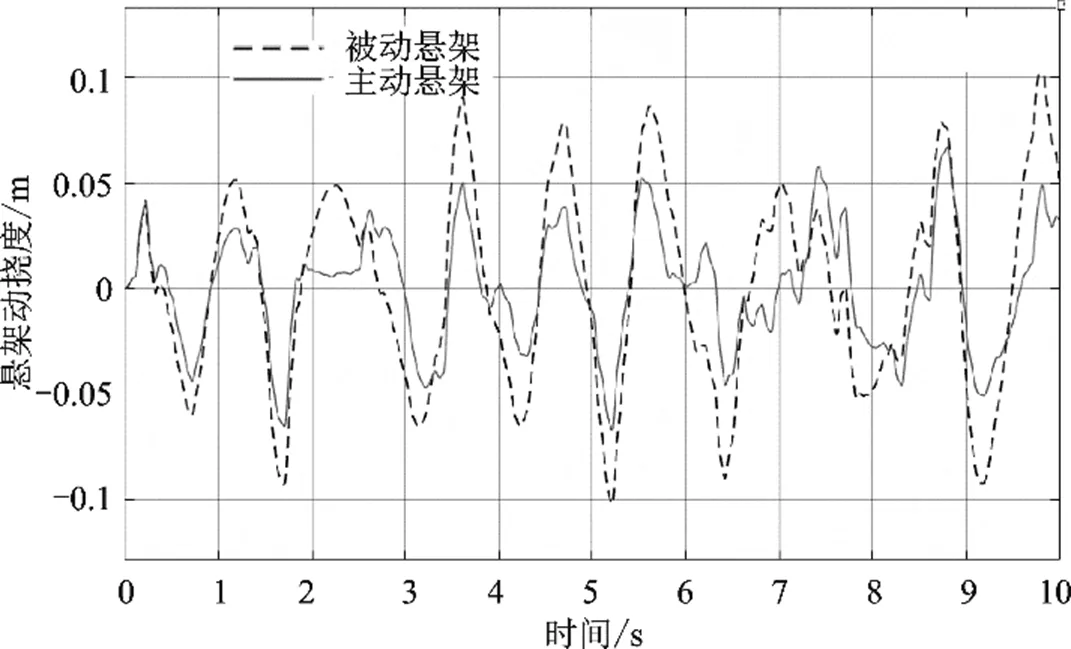
图8 悬架动挠度仿真结果对比分析
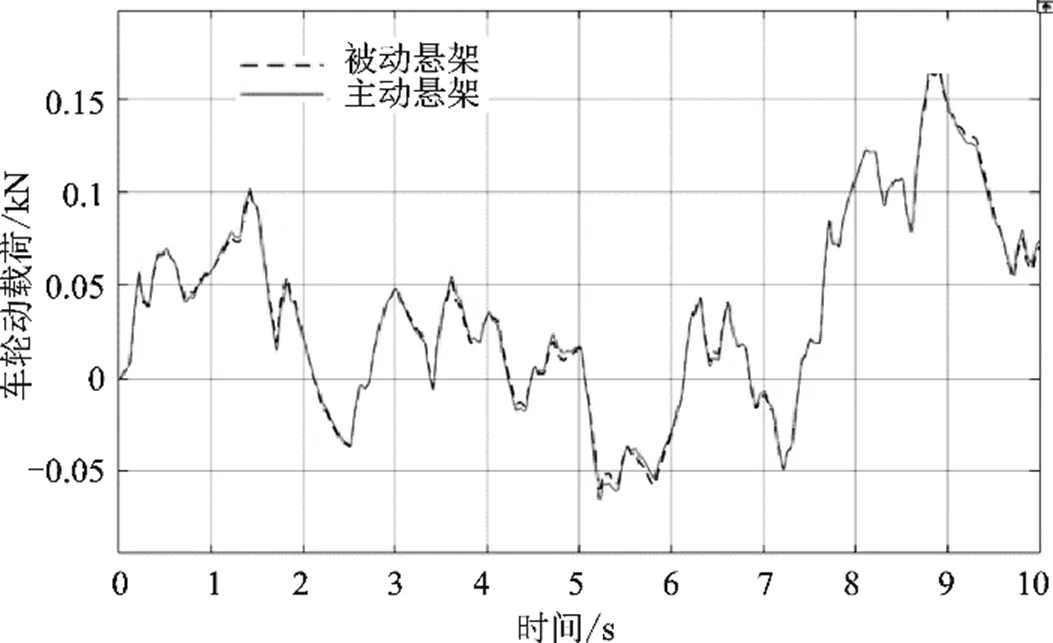
图9 车轮动载荷仿真结果对比分析
结果表明,主动悬架可以通过增大控制力来衰减振动、吸收冲击,使汽车具有更好的平顺性,进而使乘员具有更好的舒适性。
5 悬架阻尼系数对悬架性能的影响
为了分析悬架阻尼系数对悬架性能的影响,采用控制变量法控制其他参数不变,仅改变悬架阻尼系数,再进行仿真分析其汽车平顺性的变化。选取二自由度被动模型为研究对象,其他参数不变,选取了3组不同的悬架阻尼系数,其值分别为 800 N∙s/m、1 500 N∙s/m、2 200 N∙s/m,进行了仿真分析[6]。结果如图10—图12所示。
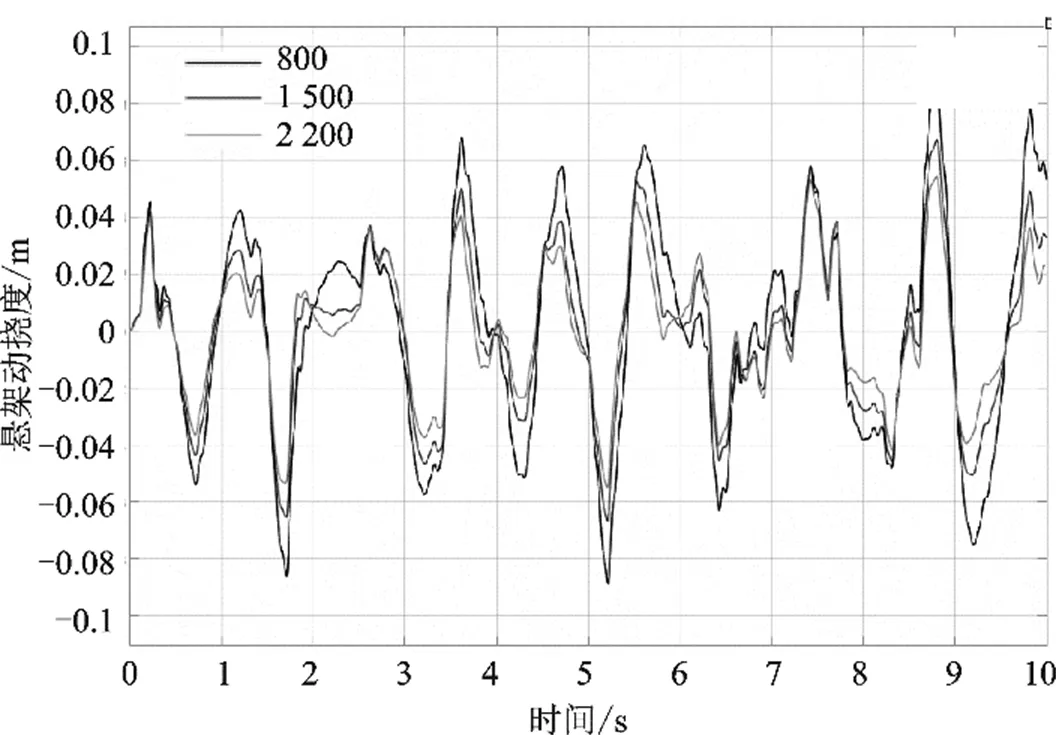
图10 悬架动挠度
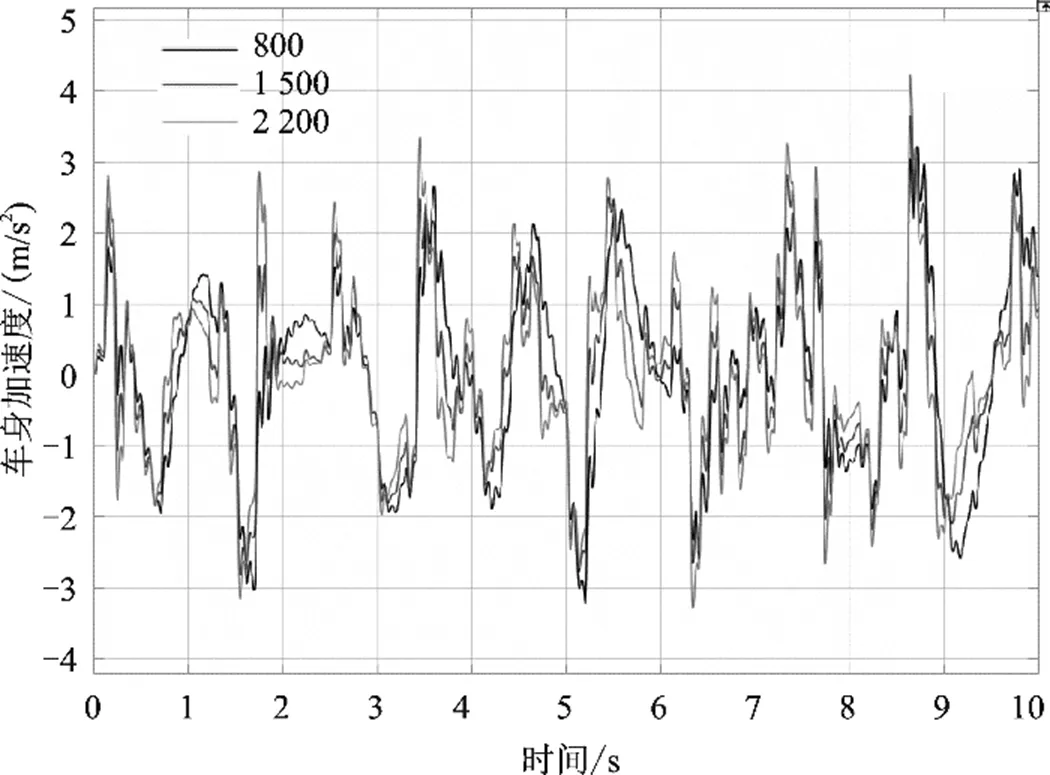
图11 车身加速度
车辆在不同悬架阻尼系数下通过B级路面的仿真图像如图10—图12所示。从图 10看出,随着悬架阻尼系数的增加,悬架动挠度峰值减小。图11表明,随着悬架阻尼系数的增加,车身加速度增大。从图 12中看出,随着悬架阻尼系数的增加,轮胎动载荷的峰值增加。仿真结果表明,阻尼系数越大,车身加速度越大,但振动衰减越快。因此,悬架阻尼的大小应该合理进行选择,从而提高车辆行驶的平顺性。
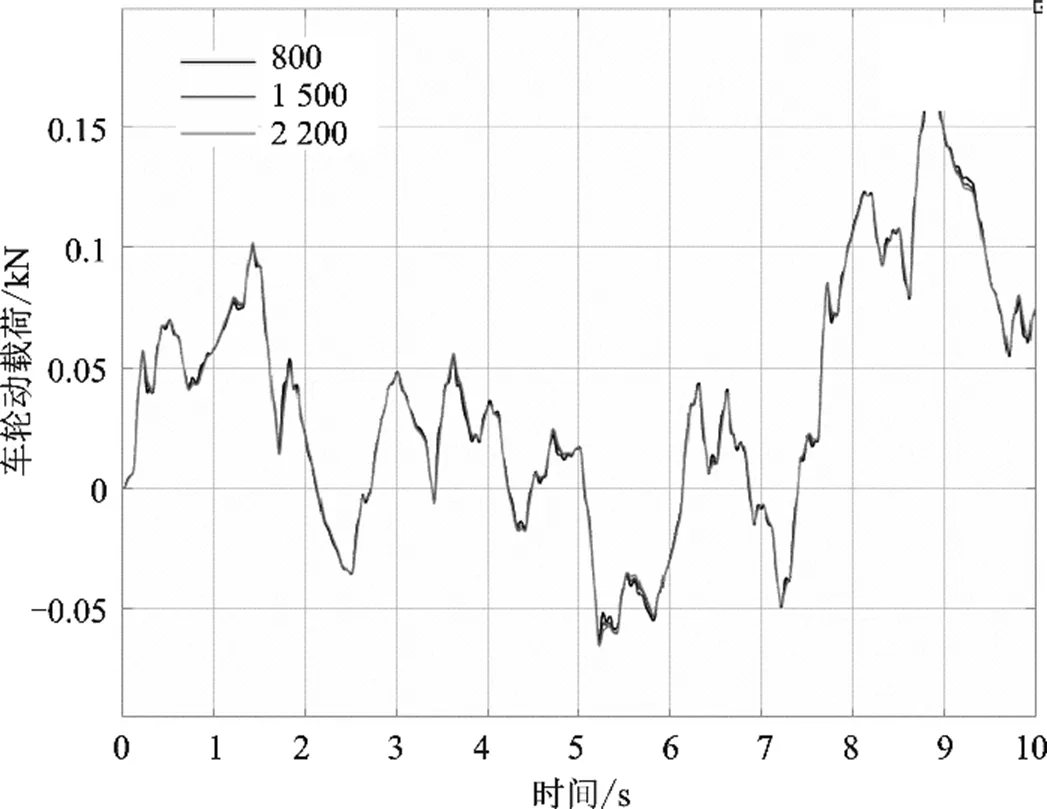
图12 轮胎动载荷
6 总结
本文以二自由度的1/4悬架系统为研究对象,先在MATLAB/Simulink环境下搭建了1/4汽车悬架系统模型,并以B级路面的激励作为系统输入进行了仿真分析,对比分析了两种悬架系统对于车身加速度、悬架动挠度、轮胎动载荷三个指标的影响。后对比分析了悬架阻尼系数的变化对悬架性能的影响。分析结果表明,主动悬架系统在三个指标中都要优于被动悬架系统,说明主动悬架系统可以通过附加的控制力来衰减振动,提高车辆的平顺性。
[1] 黄大山,王炳奇,刘海亮,等.四轮车辆路面激励数学模型[J].兵器装备工程学报,2021,42(2):142-146.
[2] 马凯,李家宝.基于不同悬架系统的汽车平顺性仿真分析[J].青海交通科技,2020,32(4):46-51.
[3] 苗宏伦.基于二自由度车辆模型的车路相互作用动力学试验研究[D].石家庄:石家庄铁道大学,2015.
[4] 张裕晨.基于PID控制策略的汽车主动悬架平顺性能研究[D].淄博:山东理工大学,2020.
[5] 金琦珺,罗骞.基于MATLAB的二自由度和四自由度汽车振动模型分析[J].科技与创新,2020(17):67-69.
[6] 荣吉利,邓增琨,何丽,等.整车主动悬架平顺性时域仿真与优化[J].北京理工大学学报,2022,42(1):46-52.
Modeling and Simulation of Different Vehicle Suspension Systems
DONG Mingfeng
( School of Automotive and Transportation, Xihua University, Chengdu 610097, China )
Taking 1/4 vehicle suspension as the research object, the differential equations of two degree of freedom vibration models of vehicle passive and active suspension were established according to the principle of dynamics. The road excitation model and suspension model of two degree of freedom for vehicle were built and simulated in MATLAB/Simulink. The effects of active and passive suspension on body acceleration, suspension stroke and wheel dynamic load were compared and analyzed. It was concluded that the active suspension can better reduce the body acceleration and the ride comfort was better than the passive suspension system.The study of active suspension system is of great significance for improving vehicle ride comfort and handling stability.
Vehicle suspension;Ride comfort;Simulation analysis;Road excitation model;Suspension model of two degree of freedom;MATLAB/Simulink
U463
B
1671-7988(2022)21-123-04
U463
B
1671-7988(2022)21-123-04
10.16638/j.cnki.1671-7988.2022.021.023
董明丰(1998—),男,硕士研究生,研究方向为汽车悬架,E-mail:953147189@qq.com。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
汽车工程师(2021年12期)2022-01-17
今日农业(2021年11期)2021-11-27
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
时代汽车(2021年1期)2021-03-03
宇航材料工艺(2020年6期)2021-01-28
北京汽车(2019年4期)2019-09-17
北方工业大学学报(2019年5期)2019-03-30
