
新能源汽车车道保持虚拟仿真实验平台分析
2022-11-23 07:20刘小斌
汽车实用技术 2022年21期
罗 钿,刘小斌,李 晶,金 慧
新能源汽车车道保持虚拟仿真实验平台分析
罗 钿,刘小斌,李 晶,金 慧
(兰州工业学院 汽车工程学院,甘肃 兰州 730050)
根据车辆工程新工科人才培养需求,文章设计了新能源汽车车道保持辅助与偏离预警驾驶虚拟仿真实验平台。构建了基于车辆保持辅助控制策略的车道保持与偏离预警控制仿真模型,基于Carsim的车道保持信息采集虚拟仿真试验系统,结合驾驶模拟器,采用硬件在环方式实现了车道保持与偏离预警仿真试验。车道保持与偏离预警虚拟仿真平台的建设将实验创新能力与工程能力培养相融合,体现了能力提升为本的教学思维。实践效果表明,以成果导向的新能源汽车车道保持辅助虚拟仿真实践创新平台体系更能突出以学生为本、能力为主的教学特色,学生的创新意识与创新能力明显提升。
新工科;成果导向;车道保持辅助系统;虚拟仿真实验平台;新能源汽车;Carsim
以创新、交叉、融合、共享为主导方式[1],将培养创新型工程人才嵌入“新工科”理念,能为应用型高校转型及教学改革提供新的思路与方法。“新工科”强调学生的工程实践能力,应用型高校紧密贯彻“学生核心、成果导向、全面工程质量教育”的宗旨,应用成果导向教育(Outcome Based Education, OBE)理念,契合“新工科”人才培养要求,积极应对新时代科技变革[2]。
从目前应用型高等院校人才培养的各个环节来看,OBE理念与方法能很好地契合“新工科”人才培养要求。通过“车道保持与偏离预警辅助驾驶系统的虚拟仿真平台”的教学实施,探索“新工科”背景下新能源汽车专业的人才培养方案,以先进驾驶辅助系统教学为例,探索教学新模式、新方法,实现产业需求导向、交叉融合导向、支撑引领导向,为新工科人才培养模式的具体实施提供一定的借鉴。新工科多学科交叉融合的内涵和特征决定着对课程体系和教学内容的改革是系统性而不是个体性,要从整个新工科专业建设的角度,有组织地、系统地、整体地进行课程设计和教学内容的选择[3-4]。相比于传统的工科人才,新兴产业和新经济需要的是实践能力强、创新能力强、具备国际竞争力的高素质复合型新工科人才[5-6]。“新能源汽车车道保持与偏离预警辅助驾驶系统新工科虚拟仿真实践创新平台”实验项目把创新思维与工程意识渗透到教学的每一个环节,借助虚拟仿真,实现沉浸式实验。
1 以成果导向的新能源汽车LKA虚拟仿真实践创新平台体系设计
车道保持辅助系统可分为感知层、决策控制层和执行层三部分[7]。新能源汽车车道保持辅助系统虚拟仿真平台结构如图1所示。感知层通过车道线识别传感器、转向力矩传感器、转角传感器和整车控制器实现车道信息和车辆信息的采集;车道保持辅助控制器为车道保持辅助系统的决策控制层的核心;电机助力转向系统为执行层,其功能为保持原车助力转向功能的完整性和稳定性,感知层扭矩传感器检测到的驾驶员转向力矩可等效于虚拟驾驶员转向力矩。由车道线识别传感器、转向力矩传感器、转角传感器和整车控制器组成的感知层通过控制器局域网络(Controller Area Network, CAN)总线获得信息。
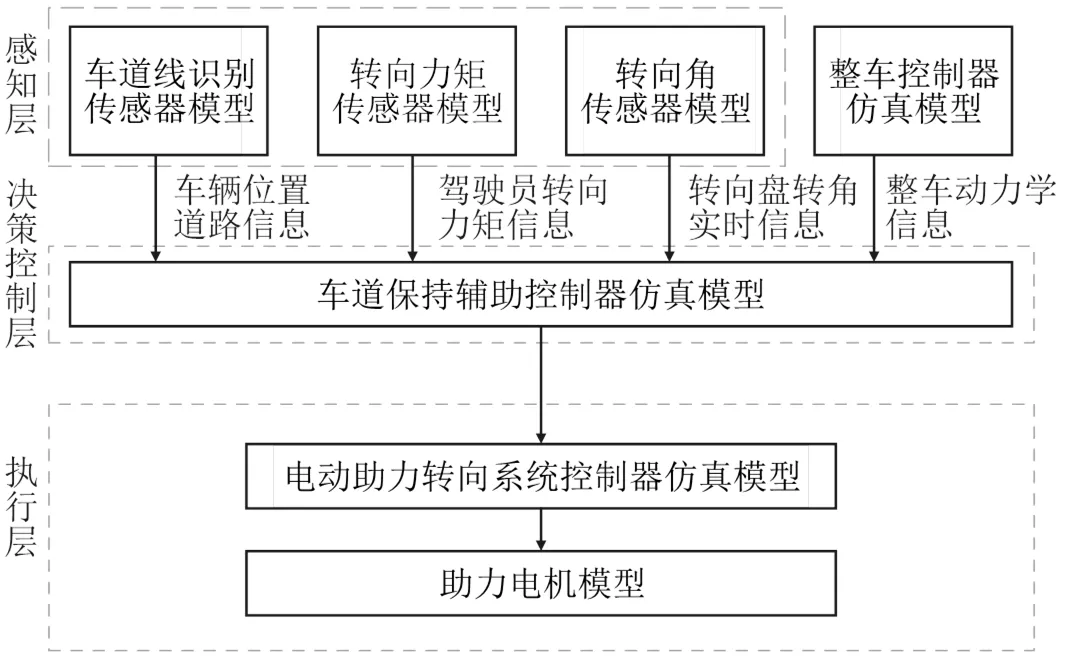
图1 新能源汽车车道保持与偏离预警辅助驾驶系统实践创新虚拟仿真平台系统结构图
2 基于驾驶模拟器的新能源汽车车道保持试验平台构建
基于SIALB驾驶模拟实验系统,建立驾驶模拟器的车道保持及偏离预警实验系统,实现由服务器、驾驶场景、驾驶模拟舱和巨型环屏组成的高级驾驶辅助系统(Advanced Driver Assistance System, ADAS)汽车车道保持横向控制试验平台,与目标机形成驾驶模拟闭环硬件仿真系统,如图2所示。
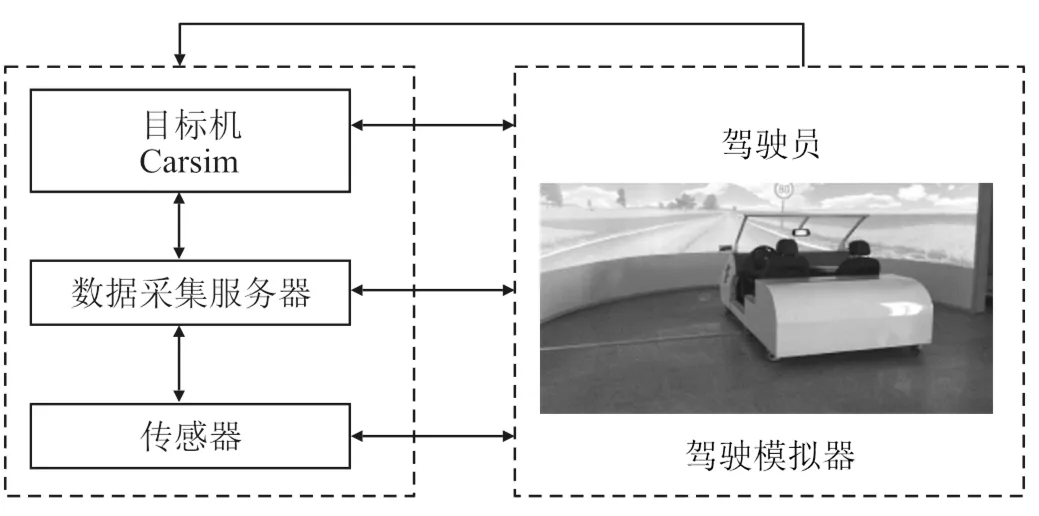
图2 基于驾驶模拟器的车道保持理实一体实验平台
基于Carsim建立的目标机控制仿真模型主要包括车道偏离检测模块、模糊控制器、车道保持控制器、协助引导控制器等四部分,如图3所示。输入信号依次为启用状态信号、车道偏离信号(m)、转向偏离量、驾驶员转向角控制信号(rad)、纵向速度(m/s)等。将车道偏差、转向偏移量输入至车道偏移检测模块。将转向偏移量、纵速度传入至模糊控制器,经模糊推理所得出的数值判断出危险等级和行驶路径的偏差,经过运算处理后输出曲率、横向偏移量与航向角输入至车道保持控制器,通过车道保持控制器结合车辆纵向速度输出车辆转向角。将车道偏离检测模块的输出信号与启用信号、驾驶员转向控制信号以及车道保持控制器输出的车辆转向角信号输入至协助模块协助引导控制器,经协同控制输出车辆状态及转向角。基于驾驶模拟器的新能源汽车车道保持理实一体虚拟仿真试验平台,帮助学生理解车道保持辅助(Land Keeping Assist, LKA)的原理、控制策略、结构组成。培养学生新能源汽车车道保持与偏离预警辅助驾驶系统的初步设计能力、测试能力以及创新能力。
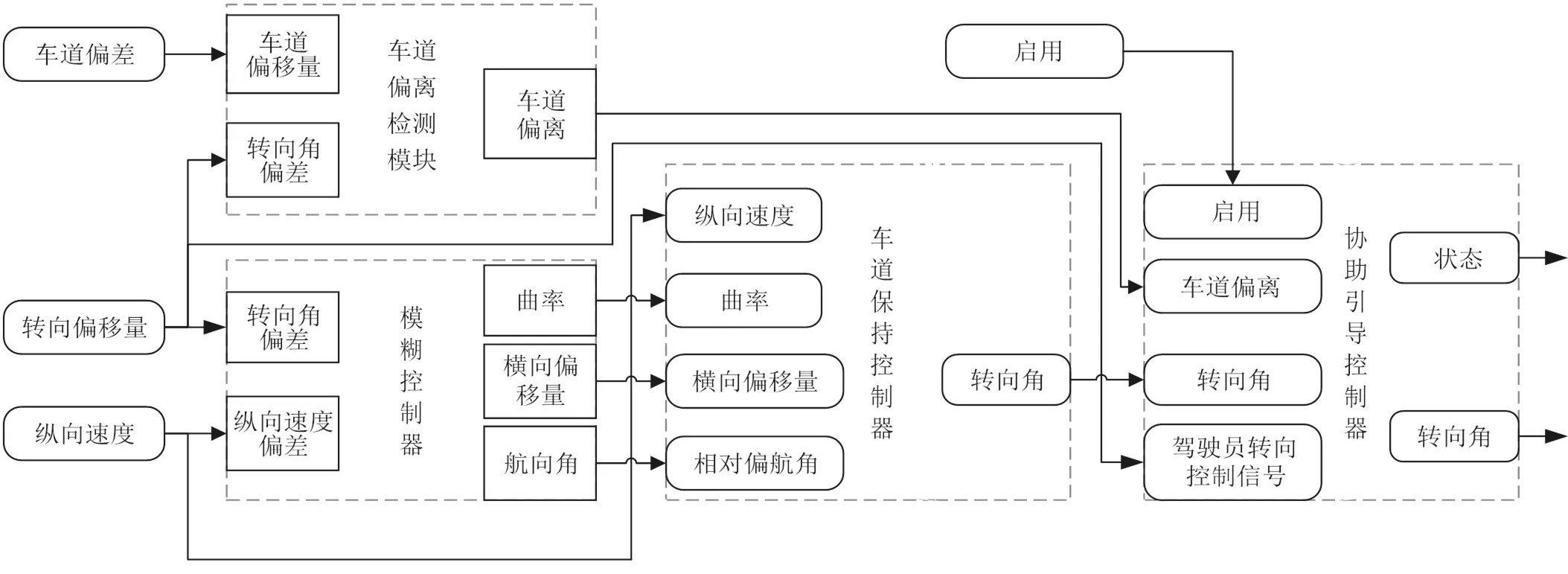
图3 新能源汽车车道保持与偏离预警辅助驾驶系统目标机控制仿真模型
3 新能源汽车车道保持驾驶系统实验过程
实验车型以大众CC为例,其参数如表1所示。学生可根据目标车型,参照Carsim系统中的C-Class车型参数值进行修改,使之与实际所选轿车性能更加吻合。目标参数的选取,仿真过程的分析,仿真结果的整理与分析都是实验的内容。
表1 整车技术参数
参数名数值 整车长/mm4 865 整车宽/mm1 870 整车高/mm1 443 整车质心高度/mm650 质心到前轴距离/mm1 010 质心到后轴距离/mm1 500 前轮胎侧偏刚度/(N/rad)40 300 后轮胎侧偏刚度/(N/rad)50 300 前轮轮距/mm1 480 后轮轮距/mm1 475 轴距/mm2 875 前轴载荷/kg760 后轴载荷/kg495 电动机减速机构传动比22
采用Carsim进行实验,根据实验步骤,建立实验室数据库。首先进行整车参数设置。其次进行道路环境设定,如图4所示。利用车道保持与偏离预警辅助驾驶系统Carsim仿真平台,完成ADAS车道保持试验分析。利用车道保持辅助系统建立如图3所示的控制框架仿真模型。根据实验场景实施,分析实验结果。
车道保持辅助系统可以在行车的全程或速度达到65 km/h后开启,并可以手动关闭,实时保持汽车的行驶轨迹。当系统开启时,利用车载传感器、车道线、方向盘力矩、车速、转向盘转角等信息由电控单元进行信息采集与处理。通过车道线和汽车的行驶趋势的比较预判,判断汽车是否偏离行驶车道[8]。

图4 基于Carsim的车道保持双变道车道实验场景
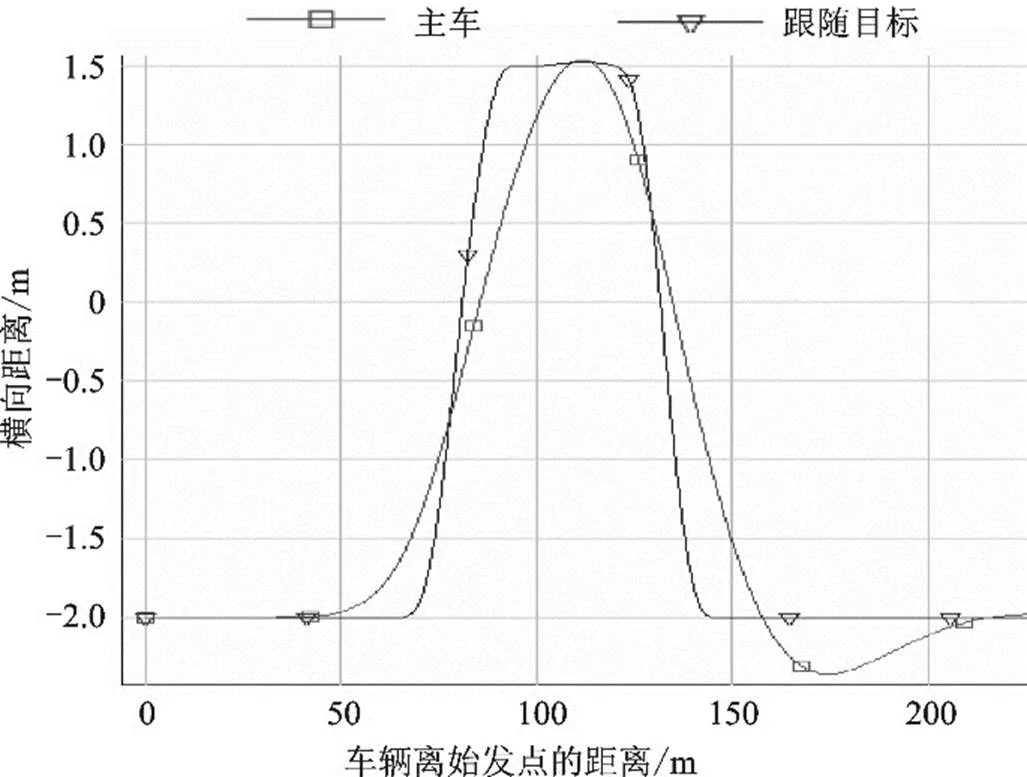
图5 横向距离曲线图
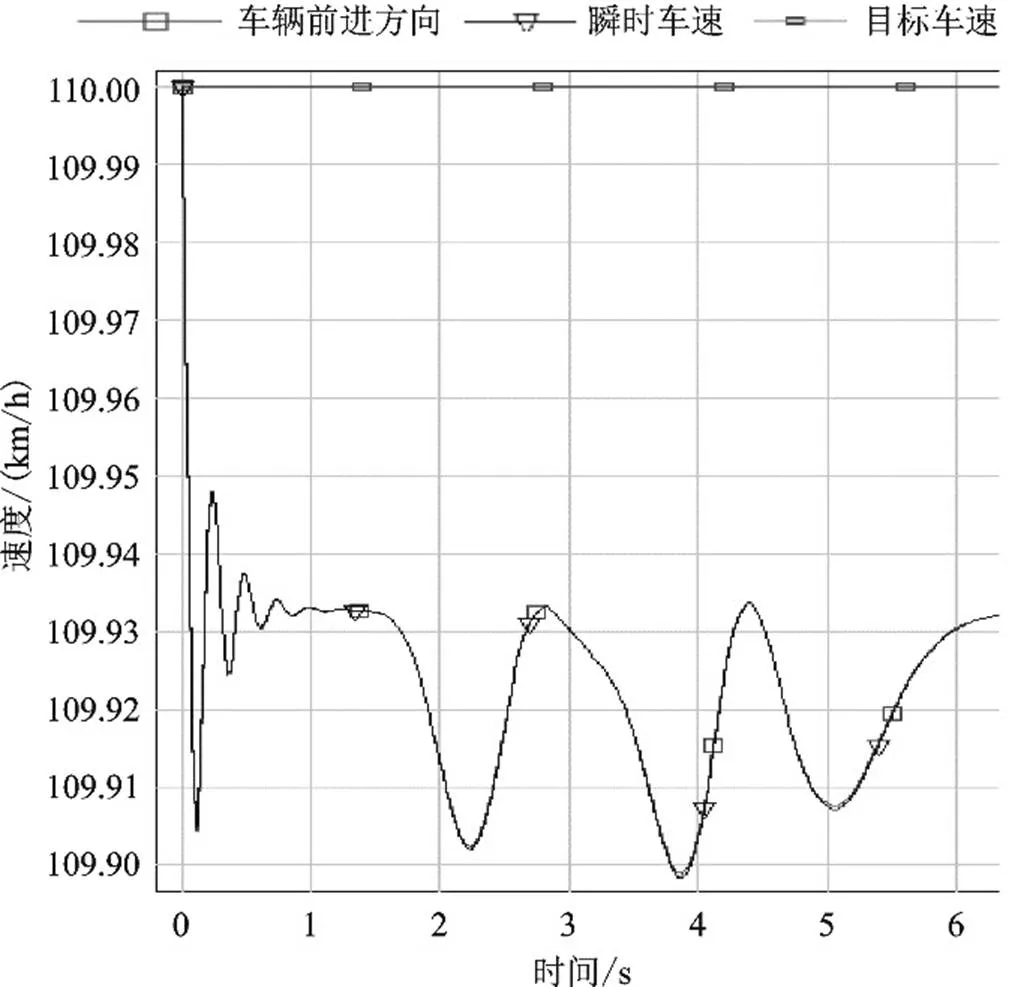
图6 车速变化曲线图
如图5和图6所示,根据车速曲线与车辆横向位置曲线,汽车在2.8 s左右进行变道,从右车道驶向左车道,并在左车道行驶一定的距离后,在4.4 s向右变道返回右车道,并在每次方向盘转向角度时进行制动处理,然后车辆保持在右侧车道中心线处行驶。
通过双变道车道偏离预警系统场景仿真分析可以得出,实验车辆在车道保持辅助系统的协助下可以在道路上进行车道的变更,如果车道发生偏离,计算机会给出警报信号与纠偏指令,并主动控制车辆进行车道保持。
4 结论
本文基于新工科理念构建“新能源汽车车道保持与偏离预警辅助驾驶系统虚拟仿真实践创新平台”,应用虚拟仿真平台可以避免学生在使用危险性高的实验设备时,保证人身安全、增加实验的实操性、降低实验安全风险,实现实验的可逆性。
探究和实践基于新工科理念的“新能源汽车车道保持与偏离预警辅助驾驶系统”实验项目教学设计、教学与教学实践,使学生可以置身模拟的环境中,切身体验仿真环境、驾驶舱操作等过程,可直观观察车辆状态、参数变化的合理性,提高实验效率。
本文通过“新能源汽车车道保持与偏离预警辅助驾驶系统的新工科实践创新虚拟仿真平台建设与教学研究”项目的实施,探索建立“新工科”背景下新能源汽车工程专业建设的新内涵、新模式、新方法、新技术。
[1] 张嘉鹭,李晓鹏,马军,等.车辆工程专业"互联网+"虚拟仿真实验教学资源建设与共享[J].中国教育信息化,2021(3):4.
[2] 张忠洋,郑利民,孙晓帮,等.虚拟仿真软件在新能源车辆工程专业实验教学中的应用[J].2016(12):210- 212.
[3] 陈泽宇,杨周,张渤,等.基于OBE理念的新工科车辆工程课程体系构建[J].科教导刊,2021(1):46-47.
[4] 曾祥炎,孟阳."三模块五平台"虚拟仿真实验教学体系的构建与实践[J].实验室研究与探索,2021,40(3): 141-144,152.
[5] 田英,王兴波,傅贵武,等.工程教育背景下智能制造虚拟仿真实验教学平台建设[J].中国设备工程,2021 (7):214-215.
[6] 田亚斌,刘东.新工科背景下卓越工程人才培养策略探讨[J].才智,2019(31):1.
[7] 郭洪强,陈慧,陈佳琛.基于EPS的车道保持辅助系统设计[J].汽车技术,2018(8):6.
[8] 陆鹏.车道保持系统仿真与试验研究[D].呼和浩特:内蒙古大学,2017.
Analysis of the Virtual Simulation Experiment Platform for Lane Keeping on New Energy Vehicles
LUO Tian, LIU Xiaobin, LI Jing, JIN Hui
( School of Automobile Engineering, Lanzhou Institute of Technology, Lanzhou 730050, China )
According to the talents training needs of emerging engineering education in vehicle engineering, a virtual simulation experiment platform for lane keeping assist and departure warning driving for new energy vehicles was designed. The simulation model of lane keeping and departure warning control based on lane keeping assist control strategy was constructed. The virtual simulation test system of lane keeping information collection based on Carsim was constructed. Combined with the driving simulator, the simulation test of lane keeping and departure warning was realized by hardware-in-loop mode. The construction of the virtual simulation platform for lane keeping and departure warning integrates experimental innovation capabilities with engineering capability training, and reflected the ability-based teaching thinking. The practical results show that the result-oriented new energy vehicle lane keeping assist virtual simulation practice innovation platform system can better highlight the student-oriented and ability-based teaching characteristics, and the students' innovation awareness and innovation ability are significantly improved.
Emerging engineering education; Result-oriented; Lane keeping assistance system; Virtual simulation experiment platform;New energy vehicles;Carsim
G42
A
1671-7988(2022)21-163-04
G42
A
1671-7988(2022)21-163-04
10.16638/j.cnki.1671-7988.2022.021.030
罗钿(1987—),女,博士,副教授,研究方向为车路协同、城市交通安全系统,E-mail:458102446@qq.com。
2022年甘肃省教育厅高等教育教学成果培育项目:新能源汽车车道保持与偏离预警辅助驾驶系统新工科实践创新虚拟仿真平台建设与教学研究(170);2022 年度甘肃省高等学校青年博士基金项目:网联自动驾驶环境下生态协同自适应巡航控制策略研究(2022QB-191);甘肃省教育科学“十四五”规划2022年度“一带一路”教育国际合作交流高项目(GS[2022]GHBZX210);2020年甘肃省教育厅高等教育教学成果培育项目:新工科背景下汽车工程类专业学科竞赛成果转化的探索与研究(192);2021年兰州工业学院新工科研究与实践项目(10);2022年兰州工业学院创新创业教育改革项目(LGYCXJG-22-10);2022年甘肃省高校创新创业教育教学改革研究项目(57);甘肃省教育科学“十四五”规划2022年度学校安全稳定与应急工作专项课题(GS[2022]GHBZX236)。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
客联(2022年3期)2022-05-31
汽车实用技术(2022年5期)2022-04-02
煤气与热力(2021年12期)2022-01-19
卫星应用(2021年11期)2022-01-19
科技创新导报(2021年34期)2021-04-13
电子制作(2019年11期)2019-07-04
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
科学导报(2018年25期)2018-05-14
