
某新能源商用车的EPB开发系统分析
2022-11-23 05:52韩彦潇李青章赵威锋
汽车实用技术 2022年21期
何 果,韩彦潇,李青章,赵威锋
某新能源商用车的EPB开发系统分析
何 果,韩彦潇,李青章,赵威锋
(安徽江淮汽车集团股份有限公司,安徽 合肥 230601)
电子驻车制动(EPB)是汽车线控制动技术的一种,无论是结构还是功能都比传统驻车制动系统具有明显的优势。此项技术目前基本已经成为乘用车型的标配,但在4.5 t液压制动的商用车型上应用较少。基于此种现状,文章对新能源液压制动商用车的电子驻车制动系统开发过程进行介绍,从功能安全、技术路线、数据校核、系统布置和控制策略五个维度详细论述了电子驻车制动的开发过程,提供一种标准化的开发流程,给相关从业人员带来一些参考,以此更加利好电子驻车制动行业在商用车的发展。
电子驻车制动;功能安全;技术路线;控制策略;新能源商用车;系统分析
随着汽车的产业升级,电动化、智能化、网联化进程越来越快,电子驻车制动系统(Electronic Parking Brake, EPB)作为一项汽车底盘安全配置,被越来越多的驾驶者所认可。EPB相对机械手刹,具有以下明显优势:首先EPB对于驾驶者更加友好,不仅能在拥堵的城市道路解放因频繁驻车带来的烦恼,而且可以辅助驾驶者坡道平稳起步,消除因溜坡带来的安全隐患;其次EPB 与电动平台具有更好的契合度,能与电控的刹车防抱死系统(Anti-lock Brake System, ABS)/车身电子稳定控制系统(Electronic Stability Controller, ESC)协同,实现 EPB 的紧急制动、AutoHold 等功能;最后随着车辆自动驾驶技术的快速发展,EPB已经具有线控驻车的执行层,已经可以扩展全自动泊车辅助系统(Auto Parking Assist, APA)、代客泊车(Automated Valet Parking, AVP)等功能,使智能驾驶成为可能。以前由于EPB成本和技术成熟度原因,在商用车型上应用较少,但是随着EPB在乘用车的普遍配置,同时商用车驾驶人员的年轻化和商用车行业的快速发展,EPB在商用车辆上也开始迅速发展。本文基于此种情况,以某N2类总质量4.5 t采用液压制动新能源商用车为例,该车型采用同轴式电驱动桥,驻车制动采用行、驻一体制动器,操纵系统采用EPB,对EPB开发过程的各个阶段进行介绍,从而给从业人员带来一种新的开发思路。
1 功能安全
EPB作为一项底盘功能安全配置,其熄火自动驻车、坡道起步功能只是其基本配置,在实际的开发过程中要考虑到多项使用场景,例如:车辆移动时意外断电、车辆维修等。面对不同使用场景需要设置对应控制策略。
1.1 静态驻车功能及判断信号
静态驻车功能指车辆点火信号打开,车辆处于静止状态,手动拉EPB开关,执行驻车制动。判断静态驻车模式信号为ABS轮速有效性信号。
车辆熄火自动驻车功能指车辆静止时,点火钥匙转至ACC位置后,自动执行驻车制动(无需拉EPB开关)。判断自动驻车模式信号:(1)ABS轮速有效性信号;(2)点火IGN+(Ignition)信号(包括硬线及控制器局域网络(Controller Area Network, CAN)线上报文)。
外部请求接口命令功能指可以响应其他控制模块的驻车命令,实现AUTO HOLD或起停功能。
1.2 静态释放功能及判断信号
静态释放功能指IGN ON时,踩下制动踏板,手动按EPB开关,释放驻车制动。判断静态释放模式信号:(1)制动踏板有效性信号;(2)IGN+信号(包括硬线及CAN线上报文)。
起步自动释放功能指车辆上电状态,挡位在前进或后退挡,驾驶员在座位上,车辆起步时,自动松开驻车制动,并根据坡度大小进行智能调整,以防溜坡。判断起步自动释放模式信号:(1)电机运行状态、转速信号和扭矩信号及有效性信号;(2)油门踏板、挡位及驾驶员侧门开关信号及有效性信号。
失效释放功能指车辆在制动踏板和油门信号都失效情况下,EPB驻车状态,长按EPB释放开关5 s,驻车释放。判断失效释放模式信号:(1)制动踏板、油门信号及有效性信号;(2)IGN+信号(包括硬线及CAN线上报文)。
维修释放功能指车辆在静止时,EPB进入完全释放状态,长按EPB释放开关10 s~15 s,松开EPB开关,3 s内按下EPB开关,EPB执行释放到底动作,用于制动系统更换维修。判断维修释放模式信号为ABS轮速有效性信号。
1.3 动态驻车功能及判断信号
动态驻车功能指在车辆行进中,拉住EPB开关不放,EPB可以通过驻车制动进行减速,且具有后轮防抱死的功能,使车辆保持稳定的减速,高附路面减速度大于0.2。判断动态驻车模式信号:(1)ABS轮速有效性信号;(2)ABS工作状态有效性信号;(3)点亮后尾灯请求信号。
1.4 自动驻车关闭功能及判断信号
自动驻车关闭功能按下EPB开关保持3 s内熄火,可以临时关闭自动驻车功能。判断自动驻车关闭信号为IGN+信号(包括硬线及CAN线上报文)。
2 技术路线
目前市场上主流的EPB系统分为拉索式电子驻车制动系统和集成式电子驻车制动系统。
2.1 拉索式电子驻车系统
拉索式电子驻车制动系统属于手刹制动的改进版,使用电机转动代替人力操纵驻车手柄,利用电机的正反转控制驻车拉索行程的变化,从而进行驻车和释放,其整体机构则与手刹基本相同。如图1所示。
当车辆驻车时,电机正转,通过双级齿轮减速机构进行驻车力矩的增加,再通过丝杠螺母机构,将电机的旋转运动转化为丝杠的直线运动,从而拉动驻车拉索。当丝杠上的拉力传感器达到设定的阀值时,电机停止转动,车辆保持驻车。如果此时整车出现意外断电情况,因丝杠螺母机构具有自锁功能,则会保持当前驻车状态。
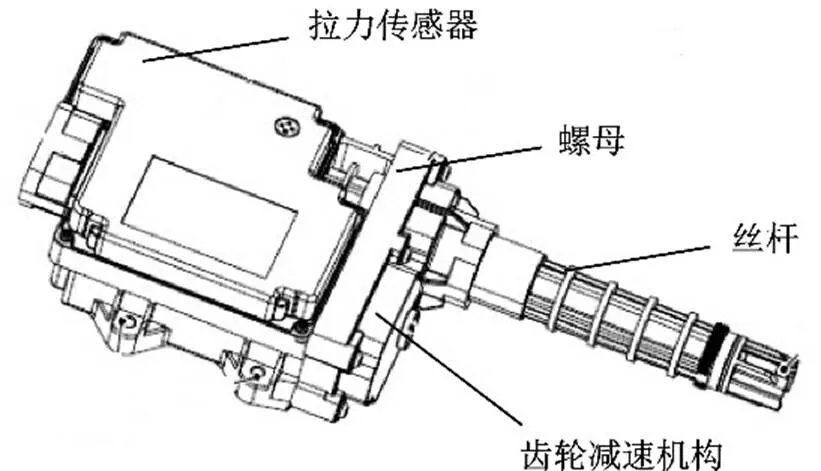
图1 拉索式EPB结构图
当驻车释放时,电机反转,通过减速齿轮和丝杠螺母机构带动驻车拉索释放,当达到设定的释放拉索行程时,电机停止转动。
2.2 集成式电子驻车系统
集成式电子驻车制动系统主要由四部分构成:电机、减速机构、丝杠螺母和制动器[5]。如图2所示。
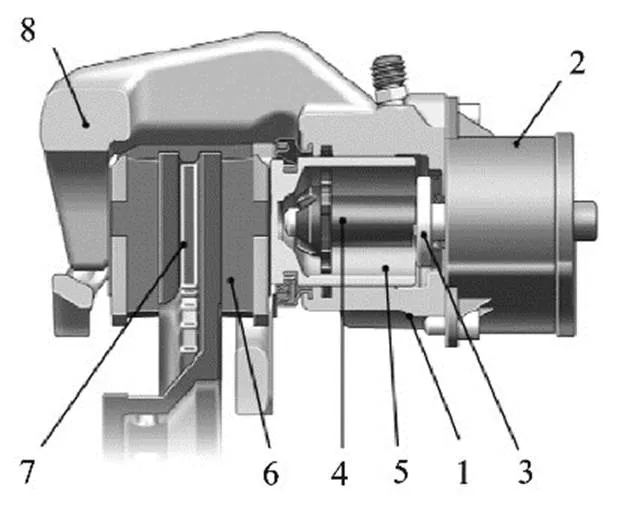
1—制动电机;2—减速增力机构;3—丝杠螺母机构的滑动丝杠;4—丝杠螺母机构的螺母;5—制动活塞;6—摩擦块;7—摩擦盘;8—制动卡钳。
驻车制动时,电机输出力矩传递到减速机构,减速机构则将传导的力驱动丝杠螺母机构的心轴旋转,推动压力螺母直线运动,从而作用到制动活塞上,制动活塞再推动右制动蹄片挤压制动盘,达到驻车制动效果。
2.3 EPB结构与适用车型对比
集成式电子驻车制动器与行车制动器集成,因为布置空间影响,目前驻车电机的输出力基本最大达到3 kN,多应用于乘用车,以及3.5 t以下皮卡和商务车型。而拉索式电子驻车制动系统布置基本不受空间影响,一般可满足4.5 t至7 t的车辆驻车需求。本车型因为总质量达到4.5 t,考虑驻车的安全需求,采用拉索式电子驻车系统。
3 数据校核
车辆在坡道上驻车时,需要满载状态的车辆能在设计要求的最大坡度上平稳驻车。通常根据整车参数,我们可以得到此车型在上下坡时所能达到的极限坡度,所谓极限坡度指整车在一定坡度上驻车时,即使驻车制动力继续增加,车辆依然无法在此坡道上驻车。然后根据整车设计开发要求,校核车辆在满载状态下能否在设计的最大坡度上平稳驻车。
式(1)为车辆所能达到的极限上坡坡度计算公式;式(2)为车辆所能达到的极限下坡坡度计算公式[1]。
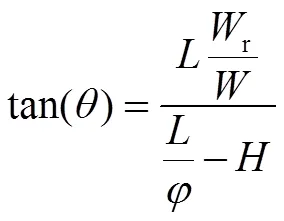
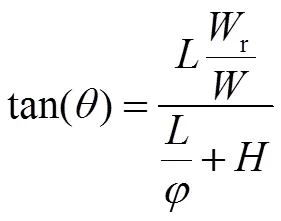
式中,为坡道角度;为车辆轴距;r为后轴质量;为车辆总质量;为车辆质心高度;为附着系数。
以某车型计算为例,表1为车辆整车参数,表2为车辆所能在上下坡道时驻车的极限坡度。
表1 整车及制动器参数
整车参数 整车空载质量/kg3 000空载后轴质量/kg1 450 整车满载质量/kg4 495满载后轴质量/kg2 545 空载质心高度/mm750满载质心高度/mm900 整车轴距/mm3 365附着系数0.8 轮胎半径/mm377制动器杠杆比4 转换机构杠杆比1.38制动器半径/mm155 制动器效能4.1系统效率0.7 制动器数量2
表2 整车空满载上、下坡极限坡度
项目空载满载 上坡极限坡度/%4758 下坡极限坡度/%3337
整车在满载状态设计的最大坡度为30%,小于车辆的极限坡度,因此,校核在各个坡度下EPB的电机输出力,能否满足要求。具体如表3所示。
表3 整车满载状态在不同坡道需求的EPB电机力
坡度/%角度/°驻车力矩/NmEPB电机力/N 10.00 5.71 1 652.48 336.48 18.00 10.21 2 942.02 599.05 20.00 11.32 3 256.95 663.17 30.00 16.71 4 772.05 971.68
整车在满载状态设计的最大坡度为30%,其EPB电机需求输出力为971 N,而本车型采用的EPB电机输出力达到1 400 N,完全满足车型的开发需求。
4 驻车系统布置
驻车制动系统的布置不仅影响驻车的可靠性,同时影响驻车系统拉索的效率和EPB电机输出力的有效性,从而影响整车驻车效果。
该车型采用轮边驻车制动器,通过主副拉索将左右驻车制动器连接起来,再通过杠杆机构,将主拉索与EPB电机推杆相连。如图3所示。
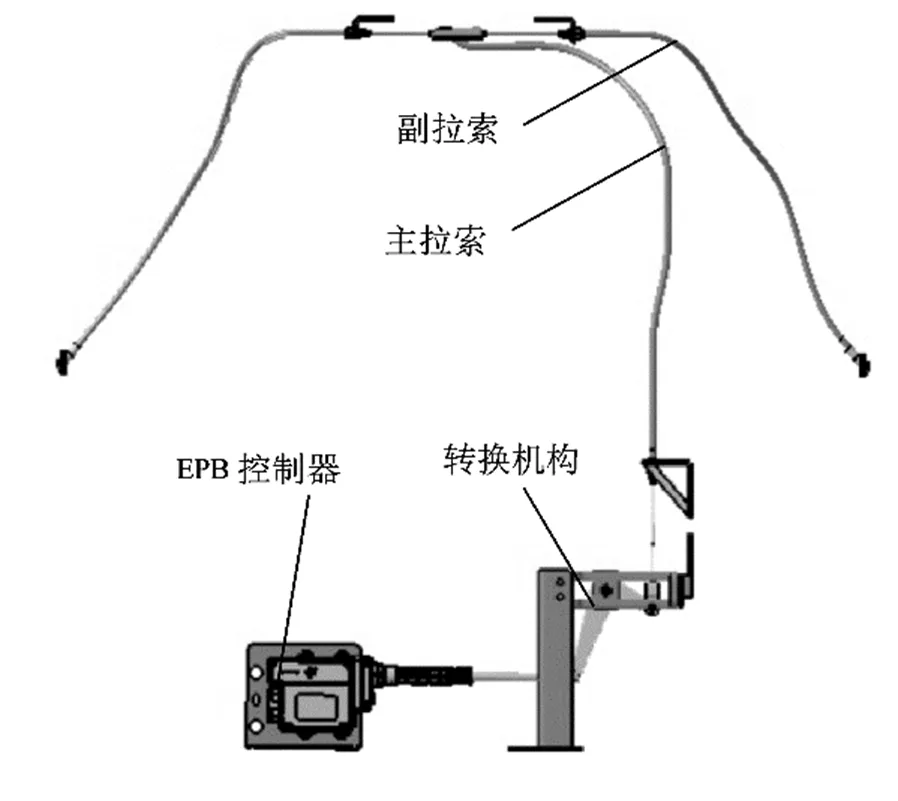
图3 EPB系统布置图
EPB输出拉索与杠杆机构连接臂呈垂直状态时,EPB的电机输出力将全部转化为主拉索的拉力。当EPB输出拉索与杠杆机构连接臂呈现一个夹角时,只有部分拉索拉力会转化为有效输出力。
有效=∙sin(3)
根据计算,夹角与垂直状态偏差5°时,有效输出力损失0.38%;偏差10°时,有效输出力损失1.52%。因此,杠杆臂与拉索的夹角应保持在(90±5)°以内。
在驻车制动过程中,EPB初始运动行程为驻车制动器的空行程,随着制动蹄片与制动鼓接触,拉索拉力开始变的越来越大,直至车辆完全驻车,拉索拉力达到最大。因此,设置在拉索的终止位置,杠杆臂与拉索的夹角应保持在(90±5)°以内。
在拉索与固定支架的连接处,拉索是通过两个固定螺母与支架紧固连接,在极端情况下,存在螺栓松动、拉索脱落的风险,一旦拉索脱落,整车驻车系统将失去驻车能力。通过在拉索与支架的连接处设置倒L形卡槽,即使拉索紧固螺母松动,但因为采用此卡槽结构,驻车拉索依然不能脱出,大大增加驻车系统的安全性。如图4、图5所示。
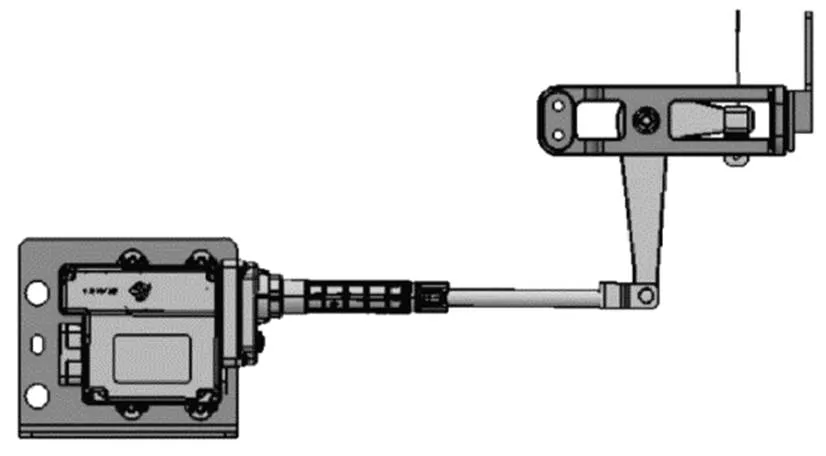
图4 拉索与杠杆臂简图
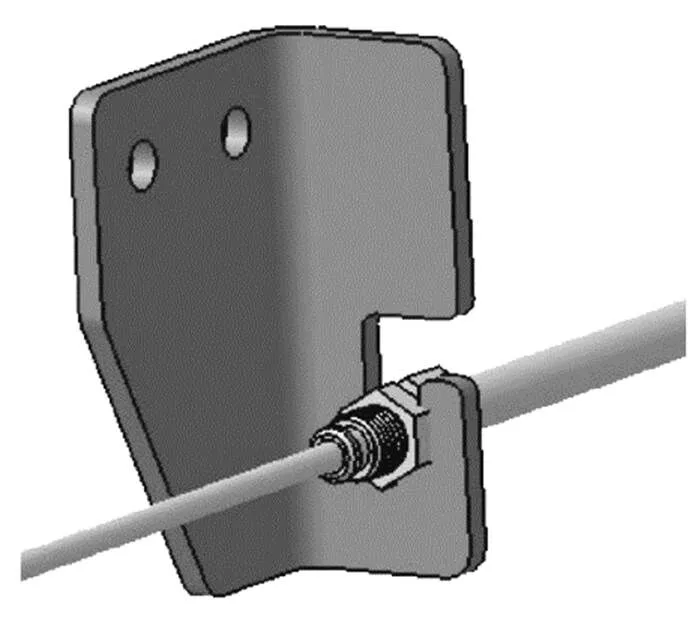
图5 固定支架倒L行简图
5 控制策略
EPB根据使用功能,分为驻车和释放两种状态。根据使用场景则分为静态驻车、坡度辅助起步、动态驻车、AUTOHOLD和车辆紧急制动。
5.1 驻车与释放判断逻辑
车辆驻车,一般是车辆保持长久的静止状态。而驻车释放,是车辆从静止状态转变为动态。因此,车辆驻车时,操纵EPB开关即可。而为了防止驻车误释放,一般驻车释放时,不仅要操纵EPB开关,同时要伴随着有效的刹车信号或油门信号,EPB才会释放驻车。
EPB在驻车时采用拉力作为判断信号,在释放时采用行程做判断信号,其主要原因在于,车辆驻车时,整车需要达到一定的驻车力矩才能满足驻车需求,使用拉索拉力作为判断信号,可以直接施加相应的驻车力矩。而驻车释放时,因为随着制动器的磨损,拉索行程会变得越来越长,如果采用驻车力矩作为释放判断信号,容易造成驻车释放不到位,而采用固定行程作为判断信号,则每次释放同样的行程,同车辆初始状态保持一致。
5.2 静态驻车
静态模式不仅包含车速为零的情况,同时包含低速的情况。通常会设计一个速度阈值,阈值速度之下的情况属于静态模式。阈值通常设置在安全车速以内,一般≤5 km/h,即在这个速度以内车轮抱死,车辆也不会产生危险状况。
静态制动的过程是,按下EPB开关,系统通过网络的车速信号判断工作模式,若是车速低于5 km/h,执行器以常规方式制动,电机正转至所需力矩时,按钮灯和仪表盘指示灯灯亮起,表示已正常驻车。坡道驻车时,会根据角度传感器提供的信号值计算出当前坡道角度,从而施加相应的力矩。
5.3 坡道辅助功能
坡道辅助起步功能在于,车辆需要起步时,只需踩下油门踏板,EPB系统经过分析计算,当电机的起步力矩达到设定的驻车力矩时,即自动解除驻车制动。
车辆在进行EPB坡道起步功能标定时,选取从小到大不同的坡度如:0%坡度,10%坡度,20%坡度,标定此坡度下需求的驻车力矩和起步力矩,当起步力矩达到设定的驻车力矩,无需驾驶员操作EPB按钮,EPB则释放驻车。其他坡度采用插值法,即可实现从最小坡度到最大坡度功能的完善[3]。
5.4 动态模式
驾驶员按下EPB开关后,若车速高于7 km/h而低于30 km/h,则会按照动态模式进行处理,如果车速高于30 km/h,则会按照紧急制动控制策略处理。EPB在动态模式下,如果驾驶员没有踩下制动踏板,只拉起EPB开关,则EPB系统判断驾驶员并没有驻车意图,只是误操作。如果车辆需要动态制动时,则需要踩下制动踏板,同时常拉EPB开关,此时EPB电机会采取轮速信号,在保证2.2 m/s2制动减速度的情况下,同时还要保证车轮不能抱死,此时EPB电机需要不断的正转和反转,即不断的驻车和释放。
5.5 AUTO HOLD
自动驻车(AUTO HOLD)是电子驻车系统的衍生功能,其极大提高了车辆的操纵舒适性和操纵方便性,尤其是针对城市工况的拥堵马路。其控制关键在于对驾驶员的驾驶意图能够准确判断,通过坡度传感器由控制器给出准确的驻车力,在起步时,驻车控制单元通过油门踏板传感器等提供的信息通过计算,当驱动力大于行驶阻力时自动释放驻车制动,从而使汽车能够平稳起步。AUTO HOLD在触发时必须同时满足以下两个条件:(1)挡位为空挡;(2)车速为静态模式。
AUTO HOLD功能有两种实现方式,一种是通过EPB的电机制动,一种是通知ESC模块进行液压制动。前者的优点在于控制逻辑简单,但缺点在于制动的作用时间稍长,噪音稍大,频繁使用可能降低电机寿命。而ESC模块通过电机加压和关闭阀的制动时间通常在100 ms以内,释放制动力时只需打开相应的阀减压,阀的开闭时间在100 ms以内。因此,AUTO HOLD功能基本都是通过ESC模块协同工作实现[4]。
5.6 紧急制动控制策略
紧急制动是指车辆在行车制动失效情况下,EPB提供制动力使车辆停下的功能。因为目前车辆上行车制动都是采用双回路制动,因此,完全失效的概率极低。紧急制动在一般情况下不会触发,只是作为行车制动的补充功能。当车速高于30 km/h时,驾驶员需要踩下制动踏板,并且常拉EPB开关,EPB则会以最大的输出力矩进行驻车。因为此时EPB电机以最大负荷工作,可能会造成EPB执行器不可恢复的损伤,从而影响系统的寿命甚至损坏,所以EPB紧急触发的的频率应该是极低的,同时所需要的触发条件也是严格的。
EPB依据以下条件判断当前状况是否采取紧急制动:(1)车速大于30 km/h;(2)制动踏板达到最大行程;(3)油门踏板行程为零;(4)EPB按钮一直按下。只有同时满足四个条件时,EPB则进行紧急制动控制,一旦EPB开关放下,则驻车功能停止。
6 试验验证
通过对4.5 t新能源液制动商用车EPB功能的标定,静态驻车、释放,动态驻车和自动驻车功能都满足了设定的功能要求。对于坡度起步功能标定结果,如图6所示。EPB标定了平地,5%坡度,10%坡度,15%坡度,20%坡度,30%坡度下的驻车力矩和驱动力矩,当驱动力矩大于驻车力矩,EPB自动释放,整车平稳起步。对于其他的坡度,利用插值法可计算所有坡度下整车需要的驻车力矩和起步驱动力矩。
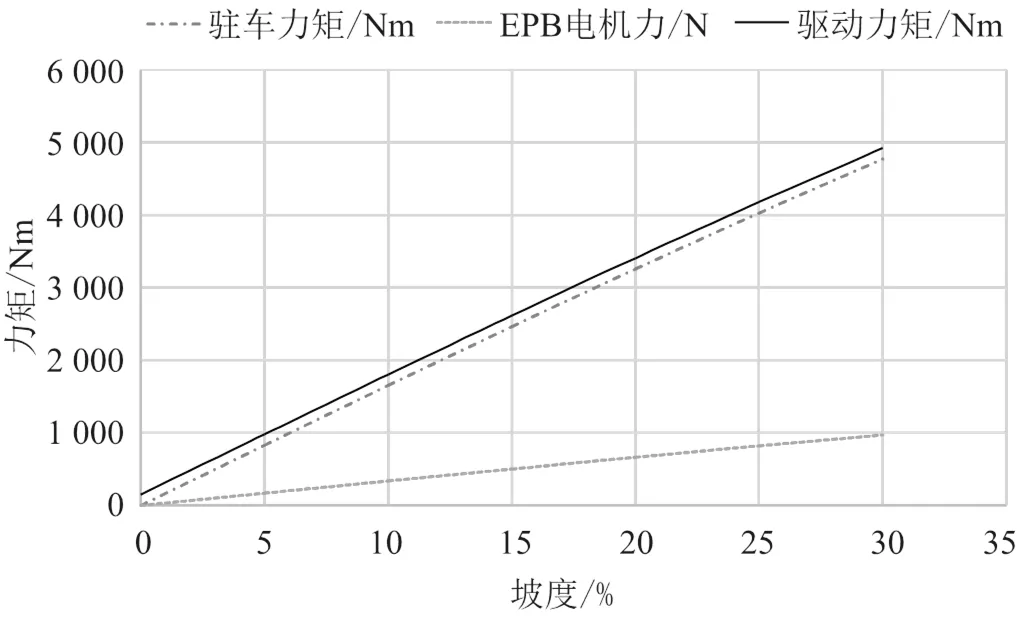
图6 各坡度下整车驻车力矩和驱动力矩
7 结论
通过对新能源液制动商用车EPB系统开发过程各个方面的详细分析,从EPB功能安全的完善,到具体的零部件布置细节研究和数据校核,从而切实论述了EPB系统开发过程的各个环节,给相关从业人员提供一种EPB开发系统思路。
[1] 方泳龙.汽车制动理论与设计[M].北京:国防工业出版社,2015.
[2] 刘惟信.汽车制动系统的结构分析与设计计算[M].北京:清华大学出版社,2004.
[3] 初亮,马文涛,祁富伟,等.集成式电子驻车系统起步辅助控制策略研究[J].农业机械学报,2016,47(3): 361-366.
[4] 熊喆.集成式电子驻车制动系统的开发研究[D].武汉:武汉理工大学,2013.
[5] 高荣.电子驻车制动系统执行机构研究与控制器设计[D].秦皇岛:燕山大学,2016.
Analysis on the EPB Development System of a New Energy Commercial Vehicle
HE Guo, HAN Yanxiao, LI Qingzhang, ZHAO Weifeng
( Anhui Jianghuai Automobile Company Limited, Hefei 230631, China )
Electrical park brake (EPB) is a kind of vehicle brake-by-wire technology, which has obvious advantages over traditional parking brake systems in terms of structure and function. This technology has basically become the standard configuration of passenger vehicles, but it is rarely used in commercial vehicles with 4.5t hydraulic brakes.Based on this situation, this article introduces the electrical park brake system development process of new energy hydraulic brake commercial vehicles, and discusses the electrical park brake development process in detail from five dimensions: functional safety, technical route, data verification, system layout and control strategy, so as to provide a standardized development process to bring some references to relevant practitioners, and be more beneficial to the development of the electrical park brake industry in commercial vehicles.
Electronic parking brake; Functional safety; Technical route; Control strategy;New energy commercial vehicle; System analysis
U463.5
B
1671-7988(2022)21-196-06
U463.5
B
1671-7988(2022)21-196-06
10.16638/j.cnki.1671-7988.2022.021.037
何果(1989—),男,工程师,研究方向为底盘制动系统,E-mail:heguo1130@163.com。
猜你喜欢
汽车电器(2022年6期)2022-07-02
科学技术创新(2022年18期)2022-06-24
汽车实用技术(2022年10期)2022-06-09
城市道桥与防洪(2022年1期)2022-02-25
汽车实用技术(2022年2期)2022-02-21
考试与评价·高二版(2020年4期)2020-09-10
汽车与驾驶维修(维修版)(2020年4期)2020-07-06
福建基础教育研究(2020年3期)2020-05-28
汽车维护与修理(2018年7期)2018-10-13
汽车维护与修理(2018年17期)2018-03-12
