基于电容补偿技术的硬标签调频系统设计与试验
2022-11-23 11:42盛庆元张西良孔宝根
自动化与仪表 2022年11期
盛庆元,张西良,孔宝根
(1.绍兴职业技术学院 机电工程与交通学院,绍兴 312000;2.江苏大学 机械工程学院,镇江 212013)
电子标签通常被作为射频识别技术(RFID)的简称,在工农业领域有广泛的应用[1-2]。目前,国内外超市基本上都使用电子商品防盗系统(EAS),高品质的标签质量是此系统正常工作的重要保证。硬标签做为RFID 中的一类,其制作过程中,有一道插磁调频工序——将磁棒插入绕有线圈的骨架中,以调整待调频硬标签线圈电感值,使线圈电感与电容串联组成的LC 闭合回路固有谐振频率符合行业范围要求[3-4]。
现阶段国内外对电子标签行业技术研究的重点始终在EAS 系统本身和标签天线上,对电子标签本身技术的研究缺乏关注。在标签品质检测技术方面,按检测探头形式来分有单线圈、双线圈、三线圈、四线圈[5-7]。文献[4]基于差分原理设计了三线圈、四线圈探头,并建立了各自的等效模型,有效提高了硬标签谐振频率检测精度;文献[7-9]研究表明单线圈、双线圈式传感器检测技术存在原理误差;文献[10-12]分别在EAS 扫频信号源,检测电路,射频接收前端进行了相关研究。
标签插磁调频方面,CN107239079A[13]、CN1085 49265A[14]专利提供了不同形式的插磁机械装置及其相应的控制电路与控制方法。文献[15]分别基于三线圈探头硬标签谐振频率检测技术、单线圈探头相位变化特性设计了压磁调频控制系统,基本满足了企业对硬标签产品质量控制要求。但其控制电路设计或控制方法复杂,再提高插磁调频精度难度较大。
采用单线圈探头,增加电容补偿电路,基于传感幅值变化特性,结合阈值的模糊控制策略,设计一套硬标签调频控制系统,以期提高插磁调频精度和效率。
1 反馈信号测量原理与分析
1.1 反馈信号测量原理
控制系统反馈信号采用设有电容补偿特点的单线圈式感知硬标签插磁调频谐振频率变化信号。采用互感耦合原理建模,如图1所示。常规单线圈探头扫频法测硬标签谐振频率的工作原理如图1(a)所示,L1为单线圈探头,R1为精密电阻,硬标签可等效为电阻R2、电感L2、电容C2串联形成闭合回路,图1(a)中左右分别由基尔霍夫电压定理可得:
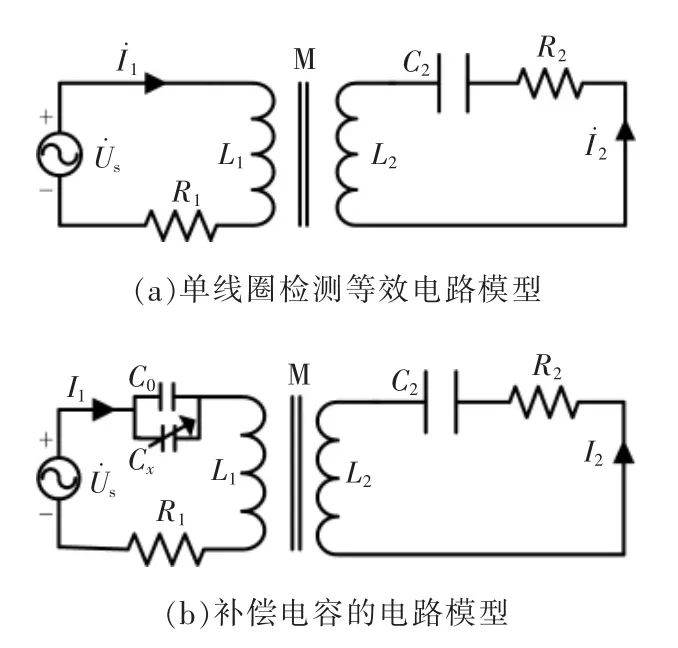
图1 传感电路设计原理Fig.1 Schematic diagram of sensor circuit design
式中:Z1为R1,L1串联总阻抗;Z2为R2,C2,L2串联总阻抗;M 为单线圈敏感探头与硬标签线圈电感之间的互感系数。
由式(1)~式(2)可得电阻R1电压向量表达式为

文献[7-8]研究已表明通过扫频法,输出信号幅值U0与硬标签谐振频率存在频移,且与单线圈探头电感量、硬标签测试摆放位置等因素有关。显然,直接使用此信号作为反馈控制信号并不合适。
改进的电路是在信号源端增加补偿电容,以插磁调频硬标签控制谐振频率f0为激励信号频率,如图1(b)所示。补偿电容CT值由w0L1=1/(w0CT)确定,其中w0为f0对应的角频率,CT为图1(b)中C0和Cx的总电容。这种情况下,由式(3)可得式(4):

显然式(4)中,L2值变化,对应的Us,U0信号的幅值比随之变化,进而可以敏感待插磁调频硬标签的谐振频率。
1.2 反馈信号特性仿真分析
对式(4)分析可知,当信号源Us幅值一定时,对某个待调频硬标签来说,U0的幅值大小与M,L2有关,且M 不变时,L2与电容C2形成的谐振频率为w0时,U0幅值取得最小值。
硬标签插磁调频过程示意图如图2所示,探头接触磁棒后,磁棒插入过程中电感L2增大,敏感探头与硬标签电感L2之间的互感系数M 也变大。借助Multisim 电路设计软件,以EAS 中使用最多的58 kHz 声磁标签为对象,厂家提供数据C2为1700 pF,R2为14 Ω;探头L1选择市售490 μH 线圈,计算可得CT取15.367 nF。对不同互感系数M 下,电感L2变化,Us、U0信号的幅值比关系进行仿真。采用mutilism 的参数扫描功能,选择交流分析模式,仿真结果导出到excel 后,用Matlab 绘制参仿真结果,如图3所示。
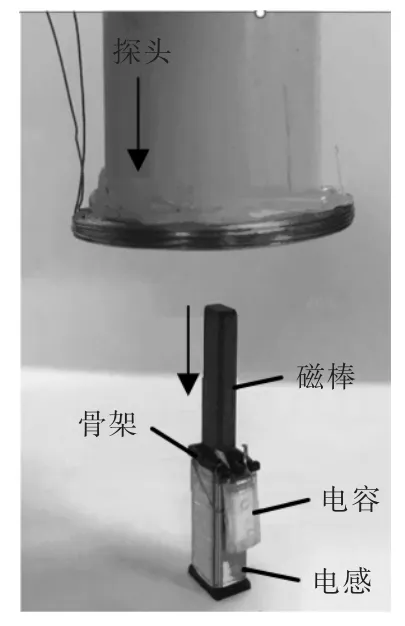
图2 插磁调频示意图Fig.2 Schematic diagram of inserting magnetic frequency modulation

图3 Us,U0 信号的幅值比Fig.3 Amplitude ratio of Us and U0 signals
由图3可知:①不同M 值,Us,U0信号幅值比极值点对应的L2值相同,且计算可得此值与CT值得到的硬标签谐振频率与信号源工作频率58 kHz 相等;②同一M 值时,在Us,U0信号的幅值比变化趋势反转前,Us,U0信号的幅值比随电感L2增大下降趋势加快;③M 值大于0.7 时,不同M 的条件下,Us,U0信号的幅值比随L2的变化曲线开始重合,即M对Us,U0信号的幅值比影响较弱。
2 控制系统电路设计
本控制系统电路设计配合双路压磁调频机设备进行,设备实物如图4所示。其工作过程:将压磁调频硬标签放置于图4中白色底座中,链条传送带将底座输送置压棒正下方,左右步进电机分别下压,完成插磁调频过程后,左右步进电机反转提起压棒,完成一次压磁调频过程。

图4 双路压磁调频机Fig.4 Dual channel piezomagnetic frequency modulation machine
2.1 硬件总体结构
本电控系统分为主从两路压磁调频,以MSP430为控制核心设计,主要由开关电源、位置传感器、步进电机驱动器、激励信号源等信号处理模块等构成,通过串口主从单元两路实现通信,单路电路硬件结构如图5所示。

图5 单路硬件结构简图Fig.5 Single channel hardware structure diagram
2.2 硬件详细设计
单路硬件电路原理如图6所示,核心电路介绍如下。
2.2.1 激励信号源设计
激励信号源单元采用AD9833 芯片,它是一款低功耗、可编程波形发生器,可以产生正弦波、三角波、方波。采用25 M 的时钟源,经过编程可以得到0.1 Hz 的时钟;AD9833 通过3 线串口进行写操作,并与DSP 和微处理器标准兼容。图6中的信号JP2 端子与单线圈探头两端相连,本项目中此芯片设置为正弦波输出,幅值0.6 VPP左右,输出阻抗为200 Ω。
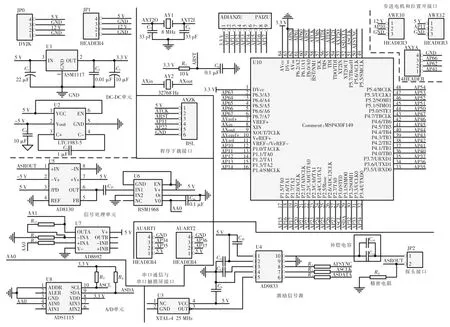
图6 硬件电路原理图Fig.6 Schematic diagram of hardware circuit
2.2.2 信号处理单元
信号处理单元包括差分信号提取模块,真有效值(RMS)转化模块和信号放大模块。其中差分信号提取模块采用AD8130 芯片实现,AD8130 为差分至单端放大器,具有270 MHz 的带宽,1 MΩ 差分高输入阻抗,94 dB 高共模抑制比。真有效值转化模块采用LTC1968,它是一款真正的RMS 至DC 转换器,并准确地支持高至4 的峰值因数。图6中的精密电阻R4上的电压信号ASROUT 经AD8130 芯片提取后,送至LTC1986,转换为其自身的有效值电压输出,在经过AD8692 组成的同相比例运算放大电路放大,作为A/D 采样信号。
2.2.3 A/D 转换单元
A/D 转换单元采用ADS1115 芯片,它是具有16位分辨率,数据通过一个I2C 兼容型串行接口进行传输,能够以高达每秒860 个采样数据的速率执行转换操作,具有一个板上可编程增益放大器(PGA)。配置寄存器值高低字节设为0xC6,0xe3,即选择通道0、满量程1.024 V,最快采样率工作。其它部分电路属电路常规设计,不再做详细阐述。
3 控制策略设计
结合压磁调频过程,信号源Us固定时,可以推理出插磁调频初期M 和L2同时变大,U0信号幅值增大,且其幅值变化率也快速增大;之后M 值较稳定,U0信号的幅值变化主要由L2决定,当U0达到最大值时,就是插磁调频的最佳控制点。本文基于上述仿真结论,针对极大值控制易超调并兼顾压磁调频效率,设计带有阈值的模糊控制策略来实现硬标签插磁调频工序。
3.1 模糊控制器结构设计
本系统以控制步进电机转速为目标,反馈信号U0变化量作为输入变量ec,步进电机转速y 即步进电机驱动的脉冲频率为输出量u,构建一个一维单变量模糊控制器,其控制器原理框图如图7所示。
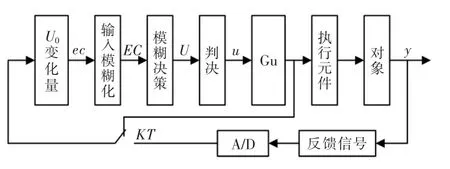
图7 控制器原理框图Fig.7 Schematic diagram of controller
图中KT 为控制切换,控制规则采用分段控制,系统设置一阈值。控制时,前半程U0数字量小于阈值时,以U0数字量为控制信号,使磁棒快速压入;后半程采用模糊控制规则,输入量经模糊化后输入到系统中,进行模糊推理,最后进行解模糊化,得到精确的输出量,来控制执行机构,实施磁棒压入深度控制。
3.2 变量模糊化和隶属函数的建立
输入输出ec,u 对应的模糊变量分别为EC,U。如图8所示,各变量均选择工程上常用的三角形隶属函数。在磁棒压入过程中,U0变化量先缓慢增大,接着急剧增大,后会出现增量变负现象。将ec 输入变量语言值分成5 个档级:NS(负小)、Z(零)、PS(正小)、PM(正中)、PB(正大),ec 量化后的论域选取[-1,3],具体量化因子试验得到;将u 输出变量语言值分成5 个档级:Z(零),PZ(正零)、PS(正小)、PM(正中)和PB(正大),对应压入速度,停、慢、中速、快速、极快速,u 的论域是拟调试脉冲频率与最大速度脉冲频率的比值,量化后的论域取[0,4]。
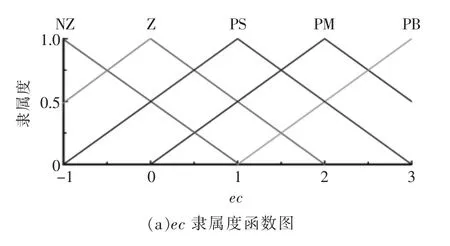
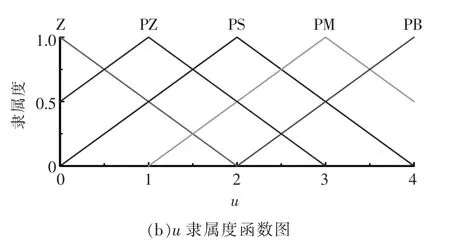
图8 输入输出隶属度函数图Fig.8 Input and output membership function diagram
3.3 模糊规则和决策方法
根据专家的理论和实践经验,采用模糊条件推理if A and B then C,得出模糊控制规则,如表1所示。模糊控制规则的编制基本原则是:U0变化量越大,控制步进电机的脉冲频率越小,防止超调。偏差变化模糊量用来控制输出量模糊集的切换。

表1 模糊控制规则Tab.1 Fuzzy control rules
4 试验与结果分析
4.1 测试方法
以58 kHz 声磁硬标签为对象,在图4所示的双路压磁调频机上进行,控制策略中的慢、中速、快速、极快速,分别对应下压速度0.5 mm/s,2 mm/s,8 mm/s,20 mm/s。从压磁调频好硬标签中抽取20 个,断开电容电感焊接引脚,用市售3060 型扫频仪检测硬标签谐振频率。为说明本装置的插磁性能,随机抽取等数人工插磁的硬标签的谐振频率为对比(人工插磁采用骨架与磁棒是间隙配合通过胶水固定),测试数据如表2所示。

表2 测试数据分析Tab.2 Test data analysis kHz
4.2 数据分析
据表2可知,基于本文反馈信号模糊控制的双路压磁调频机控制硬标签谐振频率的最大误差为73 Hz,极差为116 Hz,控制精度比人工(人工控制最大误差138 Hz)提高了近一倍;人工插磁调频方法极差范围235 Hz,而机器仅为116 Hz左右,产品质量的变异范围也大为降低;从方差分析结果来看,机器压磁调频的离散程度小,产品谐振频率一致性更好。另外,机器连续进行200 个插磁调频试验,谐振频率误差都在±80 Hz 内(剔除电容电感引脚焊接不合格品)。另外,此设备插磁调频的平均速度可达1300 个/h,是熟练人工效率的3 倍左右。
5 结语
针对传统硬标签谐振频率检测技术输出信号作为插磁调频控制系统的反馈信号存在的不足,提出一种基于电容补偿原理的单线圈敏感硬标签谐振频率传感技术。并分析了此技术输出信号随磁棒插入的信号变化特性,提出了适合硬标插磁调频过程的设有阈值的模糊控制策略,以MSP430F149 处理器为核心研制一套双路硬标签插磁调频控制系统。以生产58 kHz 声磁硬标签进行试验,数据表明,此套控制系统对硬标签谐振频率的控制精度在±80 Hz内,产品质量稳定性高于手工,生产效率为1300 个/h,是手工效率的3 倍。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
电源学报(2022年1期)2022-02-25
能源工程(2021年5期)2021-11-20
能源工程(2021年5期)2021-11-20
通信电源技术(2021年9期)2021-09-23
电源学报(2020年3期)2020-06-28
科技传播(2019年24期)2019-06-15
电子制作(2019年7期)2019-04-25
消费导刊(2018年8期)2018-05-25
中学生数理化·高二版(2016年5期)2016-05-14