
海上风电安装船八边形桩腿结构轻量化优化分析*
2022-11-27 10:34张永康柯金龙赖柏豪颜建军郑和辉陈旭东林超辉
机电工程技术 2022年10期
张永康,柯金龙,赖柏豪,高 航,仇 明,颜建军,郑和辉,陈旭东,林超辉※
(1.广东工业大学机电工程学院,广州 510006;2.大连理工大学,辽宁大连 116086;
3.启东中远海运海洋工程有限公司,江苏启东 226251;4.招商局重工(江苏)有限公司,江苏南通 226100)
0 引言
全球气候变暖问题持续加重,已成为人类当前面临的重大挑战。2020年9月22日,习近平总书记在第七十五届联合国大会一般性辩论上宣布,中国将提高国家自主贡献力度,采取更加有力的政策和措施,力争2030年前二氧化碳排放达到峰值,努力争取2060年前实现碳中和[1]。海上风电作为一种新型的清洁能源,日渐受到重视,我国的海上风力发电相关产业发展尤为迅速。2021年,我国海上风电累计装机量为2 639万kW,同比增长193.2%,新增装机量达1 690万kW,同比增长452.3%[2]。海上风电的迅速发展进一步扩大了大型海上风电安装船的市场需求。制造出安全高效的海上风电安装船,是解决海上风电场建设的“卡脖子”难题,是实现国家“双碳”战略目标的重要途径。
桩腿作为自升自航式海上风电安装船的关键支撑结构,在制造过程中需要耗费大量的钢材。单根八边形桩腿自重达505 t,桩腿的重量增添了制造、运输和安装的难度,并且在迁航过程中需要耗费更多的能源。桩腿结构的轻量化可以助力实现“碳中和”“碳达峰”的节能减排目标。目前,有关桩腿尤其是壳式桩腿的结构轻量化国内外研究文献较少,国内相关的结构优化文献为普通船体结构的优化,国外有针对固定平台的弦杠式桩腿进行结构优化的相关文献,优化的目标包括轻量化、刚度最大化、疲劳寿命最大化等。可借鉴国内外相关文献的优化方法,对八边形壳式桩腿进行结构轻量化处理。
本文将以八边形桩腿围板壁厚、导向板壁厚、平台隔板壁厚、平台隔板主肋壁厚、围板肋壁厚为优化目标,以桩腿各构件的许用屈服应力为约束条件,以单根桩腿的重量最轻、屈服等效应力冗余值最小为指标,基于Kriging代理模型和多目标遗传算法(MOGA)对八边形桩腿进行结构轻量化处理。
1 Kriging代理模型与遗传算法
1.1 Kriging代理模型
代理模型是指在分析和优化设计过程中可替代那些比较复杂和费时的数值分析的近似数学模型,也称为响应面模型、近似模型或元模型[3-4]。代理模型方法不仅可大大提高优化设计效率,而且可降低优化难度,并有利于滤除数值噪声和实现并行优化设计[5]。
Kriging代理模型一般运用在评估矿产储备含量及其分布情况。Kriging代理模型在应用时,响应值的样本点对于邻近位置的评估与预测性能更佳,但是偏远样本点却对预估发挥的作用偏小。
Kriging模型在使用的时候要求对相关数据做出假设:把欲求解得到的未知函数当做随机流程的某种展现模式。借助数学方法可以表达成,对于设计变量的任何未知量x,它所呼应的函数值y(x)都能够借助随机函数Y(x)进行表达,其中y(x)是Y(x)所有可能结果中的某一个结果,运用公式表述成[6]:

式中:fi(x)为基函数;βi为与之相对应的系数;βifj(x)为Y(x)的数学期望;Z(x)为方差σ2x均值得出为0的静态随机计算过程。
若是差异化的设计变量之间,变量与变量之间的协方差能够表述为[7]:

式中:R(x,x′)为同距离相关联的函数,代表差异化样本点之间的存在的相关属性,而且符合在距离是0的时候,R=1,在距离属于无穷大的时候,R=0,其函数值伴随着样本点之间距离的增大而变小。
为使Y(x)可以借助向量体现出来,特此定义两个特定的k×1的列向量[8]:

聚焦到n个样本点,可以先定义一个特定的n×k的矩阵[7]:

接着对随机过程向量进行一定程度的规定[7]:

那么聚焦到n个样本点所代表的响应值,ys=[ y1,y2,…,yn]T能够表达成[8]:

样本点与样本点之间所体现的矩阵可以规定成R,它由样本点与样本点间的一定函数值组成,接着对相关向量rx进行具体定义,rx作全新的样本点和已知样本点之间的相关性向量[9]。


因为模型存在无偏估计的要求,也就是E(Z(x))=0,那么在方差是0的时候,则E((x))=fxTβ,所以[8]:

Kriging的误差能够展现成[8]:

均方差为[7]:


求解后得[7]:

因此得到的预测值为[7]:

其中[8]:

其中,任何位置x*处的值y(x*)服从概率分布,能够借助N( fTβ,σ2)来表达,那么n个样本点的观测值ys=[y(1),y(2),…,y(n)]T,里面的任意观测点的概率密度为[9]:
里面的V是待求的未知量β,σ2s,所有样本集中的联合密度函数能够体现为[9]:
取对数得[9]:

对最大似然进行预估,对未知量进行求偏导数,最终得到[9]:

求得[9]:求解得到似然估计值β与σ2s,将两变量代入对数似然函数,可得[7]:

推出下面的函数,可得相关矩阵R有关的相关参数θ,p[7]:

相关向量rx与相关矩阵R表示样本点间的对应信息,它的值的大小通过相关函数来定义,一定函数值的大小同样本点与样本点间的空间距离相关,而且符合下面几点要求:
(1)在样本间距离逐步增大时,相关函数的数值会逐渐变小;
(2)在样本之间的距离大小接近无穷时,相关函数体现出的数值接近0,在两样本点数值相同时,也就是样本间的距离是0,那么相关函数的值是1;
(3)函数必须至少为一阶可导;
(4)函数的优化比较简便。
假定空间中的两点x(i),x(j),其相关的模型能够展现为[8]:

相关函数属于Kriging模型的关键参数,其中的基本原理则是接近的样本点,二者间的关联属性会比较强烈,则值之间的影响更大,若是距离很远的样本点,二者间的关联属性会偏弱。高斯相关函数是运算中常见的函数,表达公式为[8]:

本文采用高斯函数作为相关函数。
1.2 遗传算法
遗传算法(Genetic Algorithm)主要是借鉴生物遗传进化特征的思想进而演变而成的优化算法,经过Holland[10]指出和不断发展,遗传算法衍生出混合遗传算法[11]、多目标遗传算法[12]、并行遗传算法[13]等种类。遗传算法现阶段重点被广泛使用在工业、数学运算、生物、模拟研究等领域范围内。
遗传算法最初应该根据对一些已经进行完善的问题的自变量实施代码编写,也就是生物个体的基因代码的编写,一般是使用二进制编码以及实施编码。个体群众中处于不断生长阶段划分成三个方面:选择、交叉以及突变。遗传算法的流程见下文所述。
(1)种群初始化
经过编码准则对需要处理的有效解变换成遗传环境下的染色体,每一个个体的代码表示为自变量的数值,一般的编码准则包含了二进制编码、实数代码编码、多级参数编码等,本文采取实数代码准则。
(2)适应度函数
适应度函数的作用是进行划分个体的优和差,为选择提供了基本参照,通常能够通过目标函数改变来获取,基于优化的条件来开展,假如应该搜索优化问题的最低值,那么优化值越低,也就表示适应度越高,优化函数的倒数能够表示为适应函数;假如应该搜索优化问题的最高值,那么被完善之后的函数就能够表示成为适应函数。通过搜索优化问题的最高值作为参照,适应度计算函数表示成[14]:

(3)选择操作
选择操作采用选出胜者、淘汰劣质的方式开展不断完善,适应度比较好的个体有更大的概率生殖繁衍后代,个体能够被选择出来的概率和个体本身的适应度存在联系,个体适应度表现得越好,那么将会有很大可能被选择成为交叉对象,然而适应度最优的个体并不是100%能够被指定的,若选择流程上采取轮盘赌法,那么第i个体能够被选择的概率是[14]:

式中:Fi为第i个出现个体的适应度值;N为群体里面的个体数量。
(4)交叉操作
交叉操作也就是在上一代中产生出新个体,这种新个体带有在上一代个体中的比较优秀的遗传基因,而运作的流程为上一代中个体里面选取两个个体,经过两个染色体的互换与合并,将上一代里面优异的代表性基因保留给后代,组成适应程度更优的个体。因为编码形式为实数编码,则ak和a1处于j开展交叉的步骤如下[64]:

式中:η为[0,1]中的随机数。
(5)变异操作
变异是一种自然现象,想要维持物种的多样性,基因处于进化期间将会出现突变,某种突变可能造成个体的适应度减弱,然而某种突变也会表现出个体的适应度得到提升,造成优化溢出局部最优解之外。变异操作通过在全部群体里面任意挑选出某个体,之后通过在被指定的个体里面的某基因点位置进行突变。比如第i个体的j个基因aij变异步骤如下[14]:
式中:amax为基因aij的上界;amin为基因aij的下界;r2与r为一个随机数;g为现阶段迭代数;Gmax为最大迭代数(提早选择)。
遗传算法基于群体中个体的不断优化获取的最优数值,而不是对单个个体进行优化,因此优化后的解更能代表整个种群,而非种群中的某个局部。因为适应度函数的运算和优化函数存在着根本联系,不通过运算取得其余的信息值,方便产生贯通的流程。
2 Kriging+MOGA优化模型参数
单一目标优化法使用一个优化指标来评价优化效果,多目标优化法使用两个或以上的优化指标来评估优化效果的优劣,这些优化指标之间相互排斥影响,多目标遗传算法(MOGA)与单一目标遗传算法相比,优化过程更为复杂,但更符合实际,在实际工程中得到了更为广泛的运用。然而多目标遗传算法(MOGA)由于要计算较多的目标函数,在优化过程中收敛慢、耗时长,需要付出较大的时间成本和经济成本,针对这一缺陷,本文引入Kriging代理模型,与MOGA多目标遗传算法结合,大大降低了运算量及迭代次数,缩短了优化的时间,提升了优化的效率。
本文对风电安装船的桩腿进行多目标优化设计,目标为:桩腿质量最轻,用钢量最少;桩腿应力冗余值最小,最大程度发挥钢材的强度,减少结构冗余。
对于桩腿结构各部分进行参数化定义,本次优化针对板材厚度,自变量以及设计值如表1所示。按照原设计值,桩腿重量为504 644 kg。
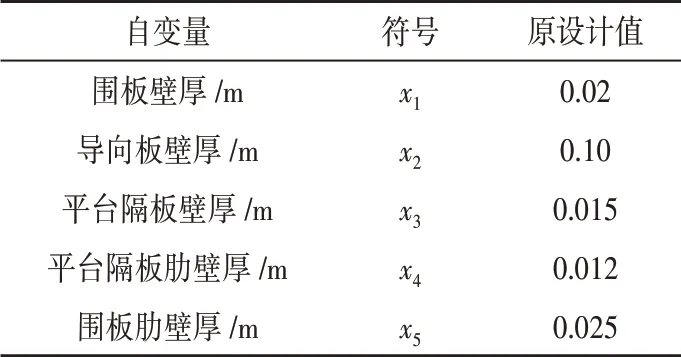
表1 自变量参数
桩腿质量M与自变量呈正比例关系,可表达为:

因此,桩腿的轻量化优化可用如下方程式表示:
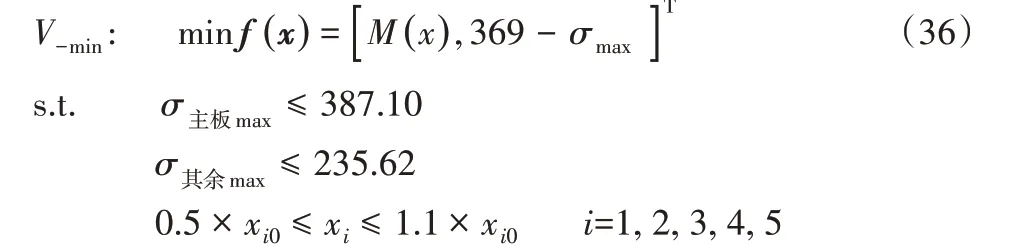
式中:V-min为向量极小化,即向量f()x中的各子目标函数都尽可能地极小;s.t.为多目标优化过程中的约束条件,约束条件包括桩腿等效应力小于许用应力,对于桩腿各结构应力分布条件的限制,参考表2对桩腿各部件材料许用应力的计算。

表2 桩腿导向板强度校核结果
为节省计算时间,提高最优解搜索效率,自变量x1,x2,x3,x4,x5的取值范围约束在初始设计值的0.5~1.1倍。
本文采用ANSYS Workbench对八边形桩腿结构进行参数化建模,以风暴自存工况,90°浪向角为设计优化工况,通过Design Explorer模块进行结构轻量化优化,引入Kriging代理模型和MOGA优化算法,初始样本数为100,每次迭代样本数为80,收敛稳定率为2%,最大迭代次数为30次,最大候选样本数为3个。具体优化计算流程如图1所示。

图1 优化计算流程
3 优化结果分析
本文在ANSYS Workbench中建立参数化有限元模型,采用原设计值,对有限元模型进行静力计算。经过10次迭代后,全部自变量参数计算收敛,由于计算采用Kriging代理模型,大部分样本结果由Kriging模型预测给出,实际进行有限元计算的样本数为361个。
图2所示为围板壁厚的迭代优化过程。围板初始设计值为0.02 m,在1~3次迭代中样本点均布于优化约束条件限定的范围内,最小样本点下探至0.01 m,在3次迭代后样本点均位于0.012 m以上并逐渐向下收敛,在第8次迭代完成后基本收敛稳定,围板的优化值收敛于0.012 m附近,壁厚减少幅度达40%,优化结果与设计初始值有较大差距。由此可见围板对于桩腿的整体力学强度贡献率较小,在保证安全的前提下可以进行较大幅度的减重。

图2 围板壁厚优化迭代过程
图3所示为导向板壁厚的优化迭代过程。导向板的初始设计值为0.1 m;在第1~2次迭代过程中,样本点均匀散布于设计值的0.6~1.1倍之间;在第2次迭代过程中,样本点出现向上收敛趋势;在第3~5次迭代过程中,样本点位于0.085~0.11 m之间。第7次迭代导向板壁厚稳定收敛于0.096 m附近,壁厚减少幅度为4%。导向板壁厚优化幅度相对于围板壁厚来说较小,这是由于导向板是八边形桩腿的关键结构部件,有较高的综合力学性能要求。

图3 导向板壁厚优化迭代过程
图4所示为平台隔板壁厚的优化迭代过程。平台隔板的初始设计值为0.015 m。在9次迭代过程中,样本点均匀分布在为提高计算设定的约束范围之内,并没有明显的收敛趋势。因此,平台隔板壁厚对桩腿整体优化的影响较小,优化值可取在设计值附近。

图4 平台隔板壁厚优化迭代过程
图5所示为平台隔板主肋壁厚的优化迭代过程。平台隔板主肋的初始设计值为0.012 m;在1~4次迭代过程中,有样本点的值超过初始的设计值;在第5次迭代后,样本点有朝下集中的趋势;从第6次迭代开始,有约80%的样本点集中在0.006 5~0.008 m;但在10次迭代后平台隔板肋壁厚的样本始终没有体现出收敛的特性,数值分布于0.006~0.012 m左右。由于在本次优化中,平台隔板主肋重量较小,壁厚变化对八边形桩腿整体质量影响不大,优化结果呈一定的发散性。平台隔板肋对平台整体的力学性能起到加强的作用,在对桩腿整体重量影响不大的前提下,应优先选用较厚的壁厚,使用平台隔板肋壁厚的初始设计值即可。

图5 平台隔板主肋壁厚优化迭代过程
图6所示为围板肋壁厚的迭代优化过程。围板肋壁厚设计初始值为0.025;迭代过程较慢,在第4次迭代过程中出现收敛趋势,最后在第7次迭代后稳定收敛于0.013 m附近;优化后的壁厚减少幅度为48%,可优化的幅度较大。围板肋是围板的加强结构,围板的壁厚减少幅度达40%,可见围板和围板肋结构存在较大的应力储备冗余和优化空间。

图6 围板肋壁厚优化迭代过程
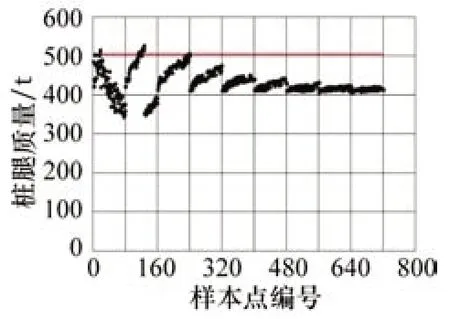
图7桩腿质量优化迭代过程
图7所示为八边形桩腿质量在10次迭代过程中的变化,可以发现桩腿质量呈现较为明显的收敛趋势。1~3次迭代,桩腿质量呈现较为明显的离散型,在第3次迭代后收敛速度加快并开始呈现收敛趋势,在第6次迭代后稳定收敛于41 000 kg附近。
图8所示为桩腿最大应力的迭代优化过程,趋势与图7桩腿质量的迭代优化相似,1~2次迭代优化效果较差,样本点沿设置的约束条件区间均布,第3次迭代后,样本点开始呈现出收敛趋势,并逐渐加快收敛速度,在9~10次迭代过程中,样本点稳定收敛于280 MPa附近。由于桩腿最大应力发生于材料为NVE-690的导向板部位,而桩腿的大部分结构为NVE-420,因此限制了最大应力接近约束条件中NV690的最大许用应力336 MPa。

图8 桩腿最大应力优化迭代过程
根据计算结果,在各样本点中选出3个较优候选样本点,与初始设计值对比如表3所示。由表可知,3个候选点桩腿质量相近,候选点1质量最小,相比原桩腿质量降低19.3%。考虑实际工程应用,为方便加工及图纸管理,各构件的尺寸应取为整数,故取平台隔板肋骨厚度为0.008 m,围板肋厚度为0.013 m,围板厚度为0.013 m,导向板厚度为0.093 m,平台隔板厚度为0.015 m。

表3 候选点与初始设计值对比
按上述优化的尺寸在ANSYS中重新建立单个八边形桩腿的模型。浪向角为90°的风暴自存工况是八边形桩腿的最危险工况[15],因此在Workbench中对该工况下桩腿位移和等效应力进行了分析。
桩腿等效应力云图如图9所示。桩腿的最大等效应力出现于导向板的第一个销孔附近,为287.7 MPa,考虑了动力因素后导向板的许用应力为387.10 MPa,等效应力的U.C值为0.74;参照表2,导向板在浪向角为90°的风暴自存工况下等效应力的U.C值为0.46。优化前后的等效应力储备程度降低,利用率提升了61%,极大地降低了强度冗余。
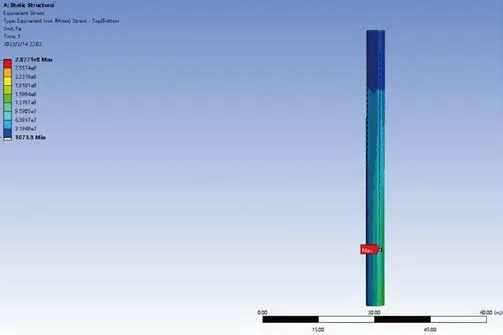
图9 候选点1应力云图
位移分布如图10所示,八边形桩腿的最大位移出现在桩腿顶部,位移为305 mm,而通过计算腿顶部Y方向位移可知在浪向角为90°的风暴自存工况下桩腿最大位移为128 mm,最大位移有较大增加,轻量化后的桩腿将会削弱了桩腿的刚度。
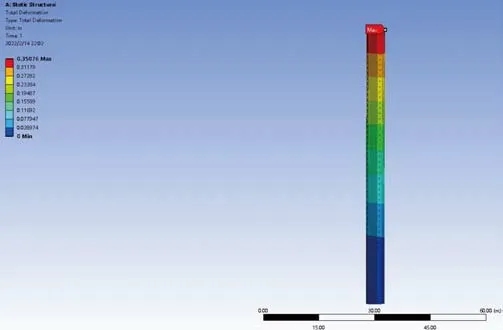
图10 候选点1的位移图
本优化计算表明,桩腿结构设计较为保守,存在较大的优化空间,使用多目标优化的方法有利于降低桩腿质量和应力冗余程度,减少用钢量,提高结构的强度利用率。
4 结束语
本文基于Kriging代理模型和多目标遗传算法(MOGA),以八边形桩腿的围板壁厚、导向板壁厚、平台隔板壁厚、平台隔板主肋壁厚、围板肋壁厚为优化目标,根据相关规范设置合理的约束条件,对桩腿结构进行了优化分析,得到以下结论:
(1)八边形桩腿的强度满足设计要求,在横浪时桩腿结构等效应力最大U.C值小于0.75,应力裕度充足且导向板、平台隔板等结构应力存在一定的冗余度。
(2)优化结果显示,取平台隔板肋骨厚度为0.007 5 m、围板肋厚度为0.013 m、围板厚度为0.013 m、导向板厚度为0.093 m、平台隔板厚度为0.015 m,桩腿质量相比原设计方案降低19.3%,且最大应力和最大位移均在许用范围内,初步达到了轻量化、降低应力冗余的目标。
猜你喜欢
沈阳建筑大学学报(自然科学版)(2022年4期)2022-11-15
北方交通(2022年3期)2022-03-20
汽车工程(2021年12期)2021-03-08
电子制作(2019年16期)2019-09-27
E动时尚·科学工程技术(2019年11期)2019-09-10
劳动保护(2019年7期)2019-08-27
福建基础教育研究(2019年11期)2019-05-28
电子制作(2019年24期)2019-02-23
IT经理世界(2017年20期)2017-10-21
中学科技(2015年1期)2015-04-28
