
煤矿井下皮带机自动巡检机器人应用实践
2022-12-08 02:42陈瑞泽
现代工业经济和信息化 2022年10期
陈瑞泽
(陕煤集团神木张家峁矿业有限公司,陕西 榆林 719100)
引言
随着科技的发展,国家煤矿安监局提出要大力发展和推广在煤矿井下应用功能机器人代替人工,降低劳动风险提高劳动效率。目前,煤矿井下皮带巡检应用的机器多采用蓄电池供电,完成对设备的数据采集和现场监测。蓄电池作为一种化学能和电能转换的化学电池,充放电过程伴随着一系列的氧化还原腐蚀反应,可释放出大量的热和易燃易爆的混合气体,在地面日常生活中应用都要格外注意安全,稍有不慎,就会引发火灾,发生爆炸事故。煤矿井下环境复杂,存在煤尘、瓦斯等,属于易燃、易爆环境,对蓄电池使用有严格的限制。另外,皮带巡检机器人在蓄电池充电期间要暂停巡检工作。
煤矿井下水泵房、变电站等巡检机器人也陆续研制成功并开始应用。但这些巡检机器人智能化水平还有待提高,巡检工作时间有限,无法达到24 h无人值守,距产业化应用还有一定距离。因此,对煤矿皮带机道,拟研发高智能化、实用性强、适合井下复杂工作环境、实现24 h无人值守的巡检机器人。
1 技术方案思路
机器人系统,能将巡检工从恶劣的工作环境中解脱出来,而且能及时发现皮带机运行过程中出现的问题,避免事故扩大化,大大降低了皮带机的非正常停机时间,实现皮带机保护由点监护提升到面监护,对煤矿安全生产具有十分重大的意义。因此,开发出一套井下皮带机道自动巡检机器人系统,代替巡检工实现井下巷道皮带日常巡检工作。
设计机器人的自发电机构装置,并设计相应的发电保护电路,如图1所示。能够将源源不断的机械能转化为机器人工作的电能,同时满足实用性和防爆安全性要求。设计机器人具有在煤矿井下复杂环境中稳定可靠的音/视频采集、处理与无线传输功能以及灵活的人机交互界面,实现机器人本体采集的皮带机巷道现场信息能够可靠、实时上传到地面控制室,为智能化分析提供大量数据基础。研究机器人智能化识别、处理算法,部署深度感知算法,对机器人采集的现场数据进行多层复杂神经网络算法,提高识别精度。部署多传感器融合算法,减少单个传感器信息损失。部署多个子任务模型算法,自主决策对某些特定目标的检测流程。
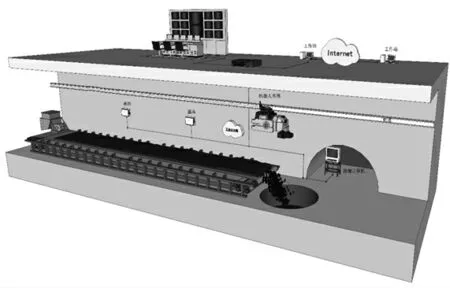
图1 机器人系统结构图
2 机器人系统分析设计
1)根据现场对机器人系统各个部分功能进行规划设计,经分析研究将井下皮带机道自动巡检机器人系统分为机器人机体、数据基站、轨道动力系统和地面机站。机器人本体沿吊挂轨道在运输巷道往复运行,替代皮带巡检工运输巷道巡检。巡检机器人的传感器,实时采集运输巷道的音像数据、红外热像数据及温度和气体浓度等信息,完成巡检作业。避免了传统巡检工巡检作业无法复现记录、不能准确量化等问题。巡检机器人将音像数据通过无线基站上传到地面存储设备,归类存储。巡检机器人在完成巡检工日常巡检任务的基础上通过对采集的数据信息运用智能技术算法进行诊断,能够准确判断设备运行状态,在数据分析基础上通过预警技术实现对井下运输设备运行故障超前预判,减少故障发生。
2)巡检机器人行走方式直接影响到运动控制系统的控制策略,也是巡检机器人在煤矿井下现场路况环境下高精度、高稳定性运行的重要基础。巡检机器人常用的行走方式包括轮式行走方式、履带式行走方式和轨道式行走方式等。为了保证机器人能够适应煤矿井下环境,并且不对现场现有设备产生影响,分析研究决定采用轨道式行走方式,确保机器人能够完成巡检工作。
3)机器人巡检实时采集现场的多种气体浓度、设备温度、声音、图像以及运行过程的避障检测、运行速度、位置等,需设计各种传感器完成机器人检测,并将数据处理上传。
4)机器人运行在井下易燃易爆的恶劣环境,需符合GB3836.1-2010《煤矿安全规程》,满足井下安全使用要求。因此,将机器人行走机构、数据采集传感器、控制模块及其他附件进行防爆设计。
5)采集数据处理分析,通过MODBUS TCP通讯协议与机器人远程通信,实现实时运行数据采集控制。机器人安装红外热系统和可见光现场信息采集系统,实现图像实时显示。机器人安装故障报警及有毒有害气体浓度检测设备,通过技术手段实时采集现场皮带机运行状态和运输巷道内有毒有害气体浓度数据。若作业设备工作异常或运输巷道内有毒有害气体浓度超标,会及时发出语音报警信号,并进行显示分析。
3 应用效果
3.1 经济效益
煤矿井下皮带机巡检工作繁琐、费时费工,煤矿井下每条皮带一班最少需要3名巡检工,一天3班,最少需要9名巡检工。按每人4 500/月工资计算,巡检工的年工资为4 500元×9×12=48 600元,操作工具及耗材费用每年约为12 000元。使用皮带巡检机器人降低了皮带巡检工人数量,减轻煤矿人工成本负担。同时,巡检机器人能有效对皮带设备故障进行预判,降低了事故发生概率,经济效益潜能巨大。
3.2 社会效益
井下皮带巡检机器人运行后能减少人工成本,并与皮带机控制系统及周边设备融为一体,实现由点到面全方位的保护,将大幅提高生产效率和设备运行的安全可靠性,提升了煤矿智能化水平,对煤炭安全生具有重要的战略意义。井下皮带巡检机器人技术先进,理论可靠,可填补本地区煤矿井下智能技术的空白,具有较高的经济和社会效益,推广应用价值高。实施风险较小,安全可靠程度高。
4 结语
巡检机器人代替巡检工完成日常的巡检任务,采用最先进的大数据智能化故障预警技术,将传统依靠个人经验的主观判断,转变为以大数据为基础的客观计算分析,准确、高效地完成了煤矿皮带机的智能巡检,降低了煤矿企业运营成本,提高了企业的生产效益,确保了煤矿安全运行。
猜你喜欢
江苏钢铁(2022年9期)2022-07-02
商品与质量(2021年43期)2022-01-18
防爆电机(2021年6期)2022-01-17
昆钢科技(2021年1期)2021-04-13
矿产勘查(2020年9期)2020-12-25
山东煤炭科技(2020年8期)2020-09-02
启迪与智慧·上旬刊(2019年5期)2019-09-10
作文·初中版(2019年8期)2019-09-09
建材发展导向(2019年5期)2019-09-09
活力(2019年21期)2019-04-01
