
基于Fe-Ga合金敏感栅式应力传感器*
2022-12-10 06:55曾宇露刘方晨万家鑫黄森林
传感器与微系统 2022年12期
曾宇露,刘方晨,王 欢,万家鑫,黄森林
(1.南昌工程学院 电气工程学院,江西 南昌 330099;2.江西省精密驱动与控制重点实验室,江西 南昌 330099)
0 引 言
随着科技的发展,传感器在工业、航空、医疗等领域有着越来越重要的作用,而应力传感器的应用最为广泛。常见的应力传感器有电阻应变式[1,2]、振弦式[3,4]和压电式传感器[5,6]。电阻应变式传感器虽然具有结构简单、灵敏度高的特点,但在测量大型结构应力时对电桥结构及布线要求高;振弦式应力传感器虽然结构简单、安装简便,但其体积较大,不适合精密构件的应力测量;压电式传感器具有输出信号大、频率响应高的特点,但其不能用于静态测量,信号处理电路复杂。各领域控制及检测系统的可靠性取决于传感器的性能,因此,研发一种灵敏度高、体积小、使用寿命长的应力传感器有着重要意义。
磁致伸缩应力传感器是以磁致伸缩材料作为敏感元件,利用维拉里(Villari)效应对应力进行测量,具有灵敏度高、过载性能好、使用便捷等特点,能够满足各领域对传感器性能的要求[7~9]。而铁镓(Fe-Ga)合金具有较好的物理性能,磁导率随应力变化显著,以Fe-Ga设计的传感器具有更好的性能[10,11]。
因此,本文以敏感栅结构的Fe-Ga合金磁致伸缩片作为敏感元件设计了敏感栅式应力传感器,并通过有限元仿真及实验分析了所设计的传感器性能。
1 结构设计
设计的磁致伸缩应力传感器由Fe-Ga合金片、霍尔传感器、线圈及U型磁芯构成。其中,Fe-Ga片作为敏感元件,需具有足够高的柔度,厚度为0.15 mm,并采用敏感栅结构对Fe-Ga片进行设计,其结构如图1所示。
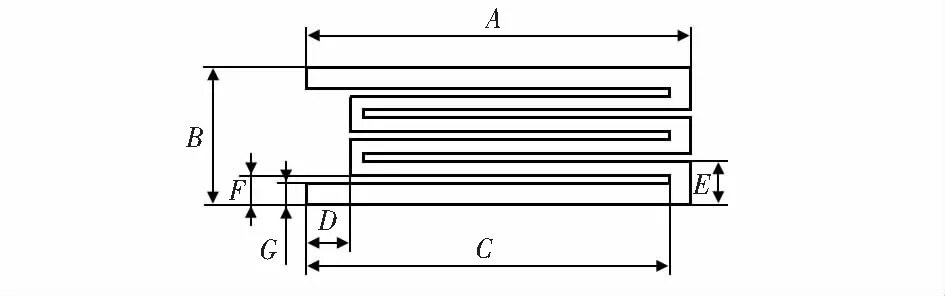
图1 Fe-Ga片敏感栅结构
为减小传感器体积,采用单边U型磁芯设计;使用高灵敏度霍尔元件作为转换元件,可对磁通量进行静、动态测量;利用多匝线圈产生稳定可调的偏置磁场。其整体结构设计如图2所示。
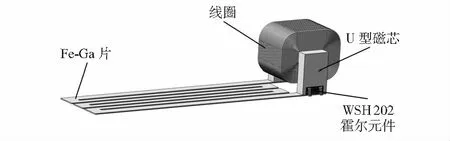
图2 Fe-Ga应力传感器整体结构
结合图1、图2,Fe-Ga应力传感器主要结构参数如表1所示。
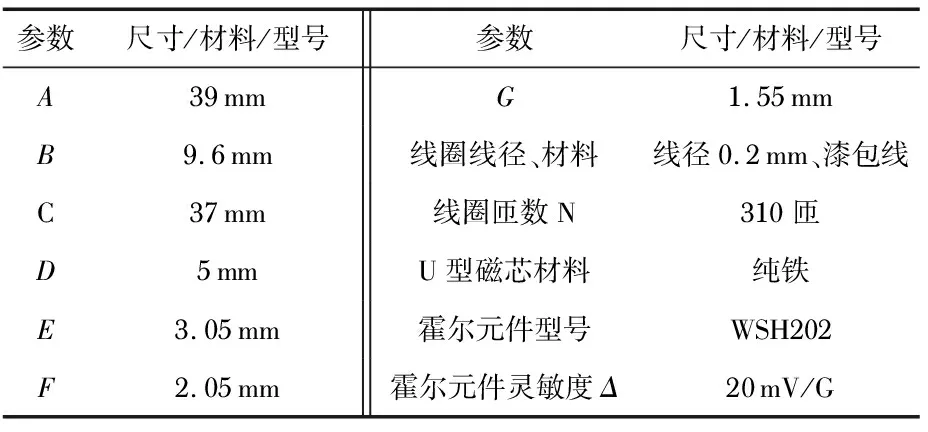
表1 Fe-Ga应力传感器结构参数
2 建 模
磁致伸缩应力传感器对应力的检测基于磁致伸缩材料的Villari效应,磁致伸缩材料在恒温环境下的线性压磁方程表示为[12]
(1)

(2)
由式(1)、式(2)可得磁通量与应力σ间的关系
B=σ(d33-μσ/(EGd33))+μσε/d33
(3)
式中 磁致伸缩片的应变ε=ΔL/L,ΔL和L分别为磁致伸缩材料在偏置磁场作用下的长度变化和初始长度,ΔL可表示为[14]
(4)
式中μ0为真空磁导率,B0为偏置磁场下的初始磁通密度,与偏置线圈电流大小及磁路磁阻有关。根据霍普金森定律,磁路的磁通量
φ=BSh=NI/rt
(5)
式中B为通过霍尔元件表面的磁通密度,N为线圈匝数,I为线圈激励电流,Sh为霍尔元件截面积,rt为磁路总磁阻。磁路总磁阻由磁芯磁阻rF和Fe-Ga片磁阻rG组成[15]
(6)
式中 下标i和j分别为磁芯、Fe-Ga片各截面标号,li和lj为垂直各截面方向的磁芯和Fe-Ga片长度,Si和Sj为磁芯、Fe-Ga片各截面对应的面积大小,μF为磁芯材料的磁导率,μG为Fe-Ga片各截面垂直方向上对应的起始磁导率。假设Fe-Ga片各截面面积相等,为SG;且铁芯各截面面积相等,为SF。则由式(3)、式(4)可得初始磁通密度
(7)
当传感器粘结于被测物表面时,假设被测物为长方体,且受平行于传感器长度方向的外力F作用。假设外力由被测物传递至传感器的过程中无损耗且传感器受力均匀,则Fe-Ga片所受应力σ=F/S,S为Fe-Ga片表面积。根据式(3)、式(4)、式(7),可得传感器输出电压U为
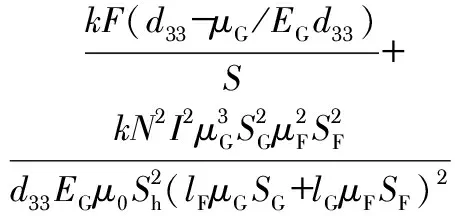
(8)
式中k为霍尔元件灵敏度。对式(8)求导,可得应力F变化与传感器输出电压U变化的关系
(9)
3 有限元仿真分析
3.1 仿真设置
建立图3所示的仿真模型。
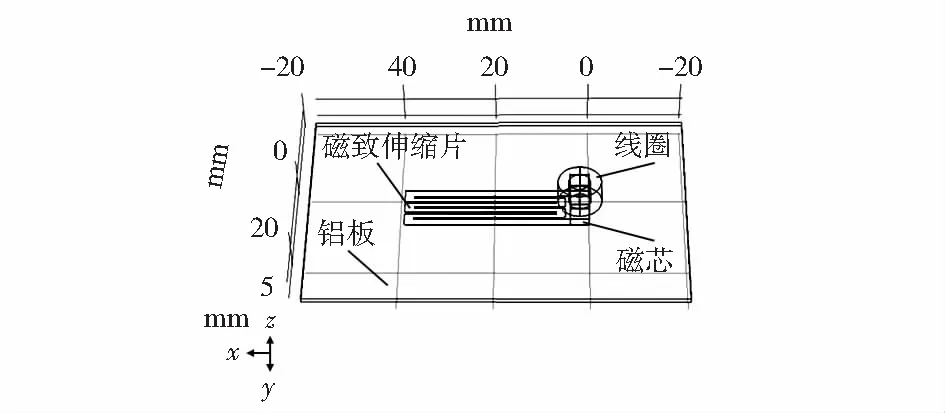
图3 仿真模型
模型中,试验铝板板长80 mm,宽50 mm,厚1 mm。图3模型包裹在直径为60 mm的球形空气域中。仿真过程中,固定铝板左端,在右端以125 N的间隔在x轴方向上施加-625~625 N的力,线圈设置为310匝,线圈线径设置为0.2 mm,线圈通入电流分别设置成0.10,0.15,0.20 A,进行多次仿真计算。模型各部分材料属性设置如表2所示。
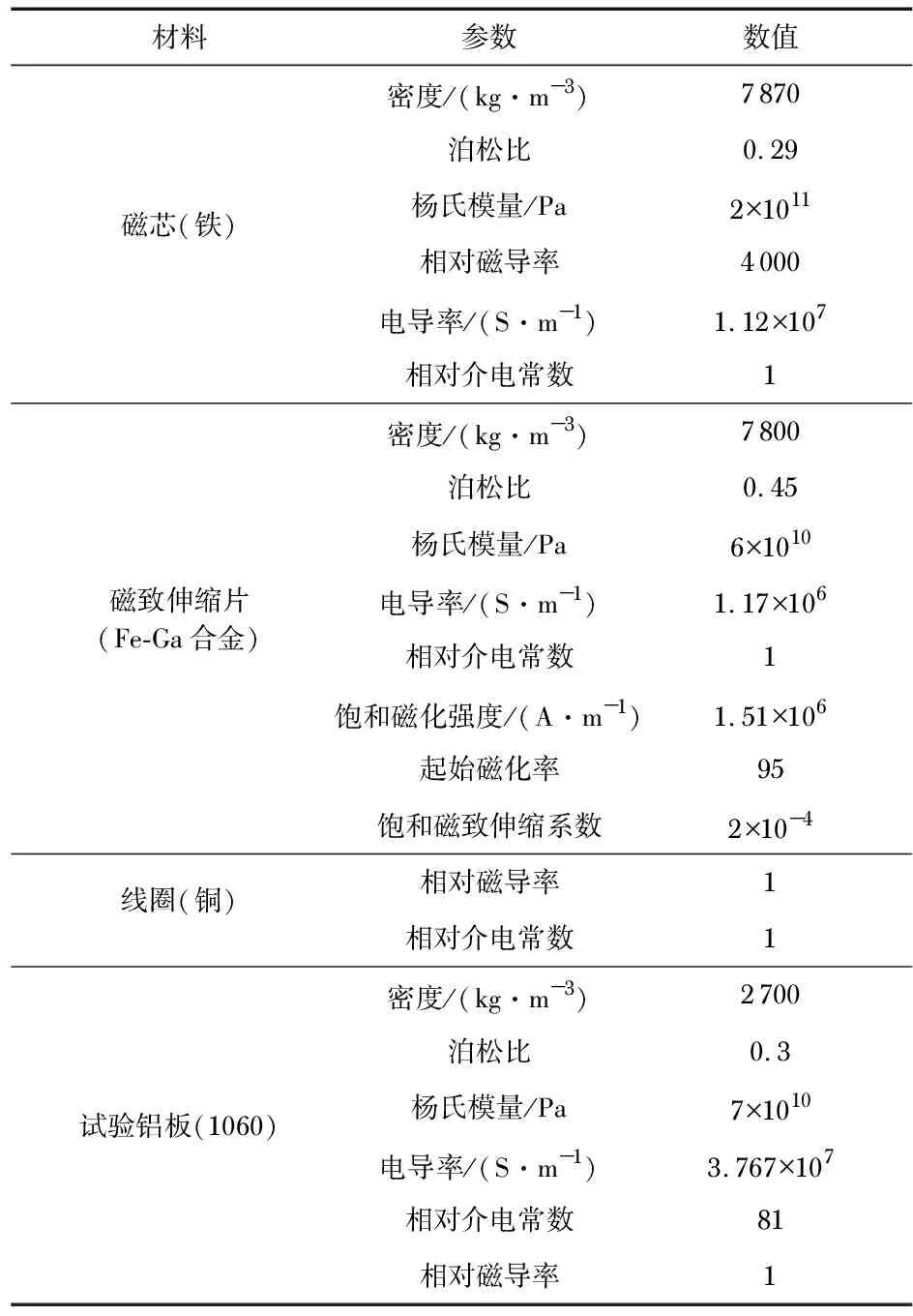
表2 材料属性设置
3.2 力—磁耦合仿真结果与分析
为求解磁致伸缩应力传感器输出特性,对传感器进行力磁耦合分析。给线圈通入0.2 A电流时,在0 N和625 N拉力作用下,磁致伸缩传感器磁路中磁通密度分布分别如图4所示。
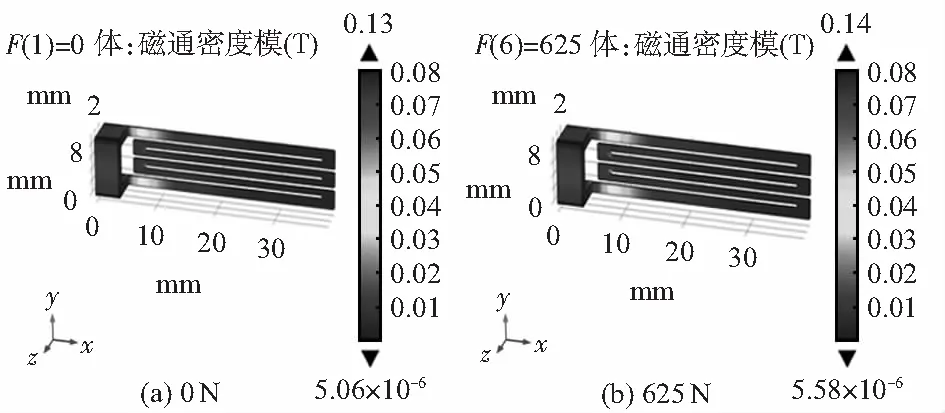
图4 不同拉力下磁通密度分布
由图4可知,磁通密度在磁芯与磁致伸缩片连接处有集中,且随着磁场路径增大而减小。当施加在铝板上的拉力由0 N增加至625 N时,最大磁通密度由0.13 T增至0.14 T,即磁致伸缩片磁导率增大。
为比较不同电流,不同应力作用下,霍尔传感器输出电压大小,对磁芯单边与磁致伸缩片接触面设置探针,取磁通密度平均值B,并在有限元软件中定义输出电压U=kB。不同电流、不同应力作用下有限元仿真结果如图5所示。
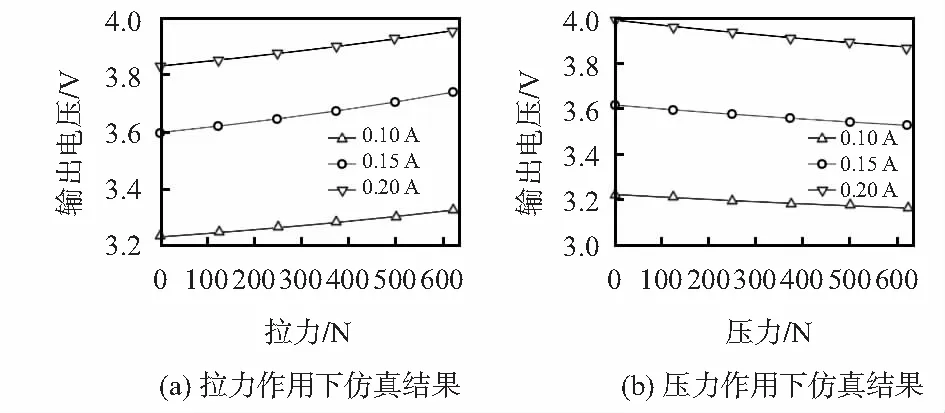
图5 磁致伸缩传感器输出电压仿真结果
由仿真结果可知,传感器输出电压随拉力的增大线性增大,随压力的增大线性减小。结合力学仿真结果,设计的磁致伸缩应力传感器在0.10,0.15,0.20 A线圈电流下,拉力灵敏度分别为9.87,14.8,13 mV/MPa,压力灵敏度分别为6.25,9.32,12.43 mV/MPa。有限元仿真采用非线性模型计算,且考虑了传感器磁场的非均匀分布及磁致伸缩现象带来的影响,因此,有限元仿真的传感器灵敏度是变化的,且电压呈现非线性变化。
4 实验结果与分析
根据设计的磁致伸缩应力传感器尺寸结构,制作的样机如图6所示。
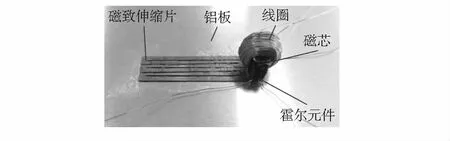
图6 磁致伸缩应力传感器样机
样机中,磁致伸缩片与铝板之间由810结构胶连接。试验平台搭建如图7所示。其中,稳压直流电源给线圈分别提供0.10,0.15,0.20 A的可调节电流,电源变压器给霍尔元件提供5 V直流电压。
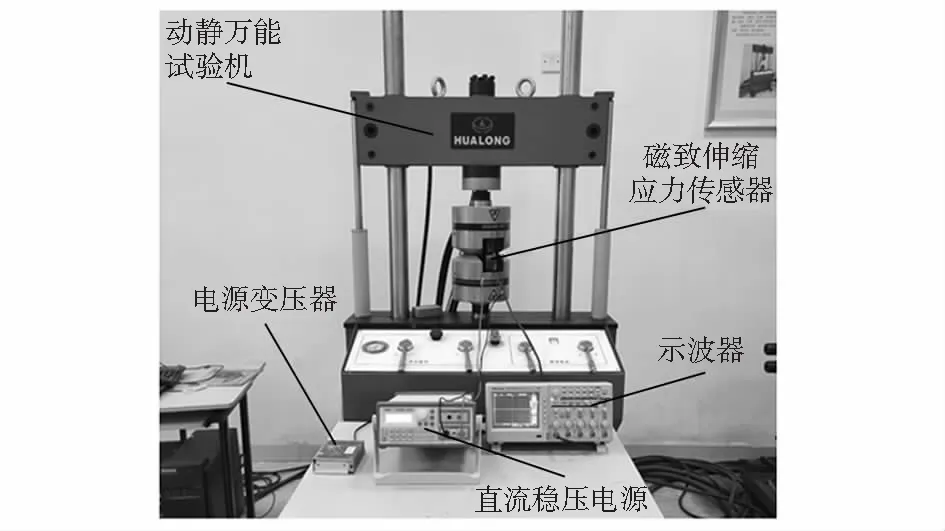
图7 试验平台
万能试验机夹持铝板两端,在不同线圈电流下,以125 N为间隔,施加0~625 N的拉力和压力。示波器采集的霍尔传感器输出电压与拉力(压力)的关系如图8所示。
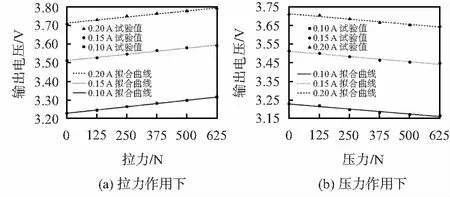
图8 对应不同激励电流的霍尔传感器输出电压
由实验结果可知,传感器输出电压随拉力的增大线性增大,随压力的增大线性减小。结合力学仿真结果,设计的磁致伸缩应力传感器在0.10,0.15,0.20 A线圈电流下,拉力灵敏度分别为9.12,8.7,8.52 mV/MPa,压力灵敏度分别为7.08,7.34,7.49 mV/MPa,具有高灵敏度。
传感器输出电压基本呈线性变化,在非均匀磁场下的传感器,其灵敏度随线圈电流变化,与有限元仿真结果较为吻合。输出电压的变化与有限元仿真结果较为吻合,但仍存在误差。其误差由以下因素导致:1)传感器加工精度误差;2)万能试验机试验过程中会产生低频振动,影响输出信号稳定性;3)万能试验机夹头具有导磁性,影响传感器磁路;4)磁致伸缩片与铝板之间由结构胶连接,影响力的传导。
5 结 论
设计了一种敏感栅式磁致伸缩应力传感器,其整体结构简单,由Fe-Ga片、霍尔元件、线圈、磁芯构成,能够贴于测试件表面测量测试件表面应力。实验表明:在0.10,0.15,0.20 A线圈电流激励下,传感器拉力灵敏度分别为9.12,8.7,8.52 mV/MPa,压力灵敏度分别为7.08,7.34,7.49 mV/MPa,具有较高灵敏度。传感器具有体积小、灵敏度高的特点,且除试验用的粘结方式外,传感器还可通过焊接固定在结构件上,实现长期实时在线测量,具有较高的应用研究价值。
猜你喜欢
材料研究与应用(2022年4期)2022-09-01
清远职业技术学院学报(2022年1期)2022-01-24
舰船电子工程(2021年12期)2022-01-06
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
航空发动机(2020年3期)2020-07-24
中国农村水利水电(2019年1期)2019-01-21
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
