
多段圆弧混凝土结构高精度测量关键技术*
2022-12-12 02:46张少帅吴东方李浩坤王道亮魏李照
施工技术(中英文) 2022年22期
张少帅,吴东方,李浩坤,王道亮,魏李照
(陕西建工第五建设集团有限公司,陕西 西安 710055)
0 引言
随着建筑业的迅猛发展,大量体现时代气息和具有文化内涵的异形建筑,如多段圆弧形结构不断涌现,给测量施工带来了巨大挑战。准确地对弧形结构进行测量定位是弧形建筑施工的重难点。
国内外对异形混凝土结构相关分部工程施工技术如测量技术的专项研究依旧较少。李强等[1]在富阳北支江水上运动中心异形结构工程施工测量中详细阐述了从布设到测量的过程,并提出相应的施工方案,保证了施工的连续性和均衡性。黄曙亮等[2]在北京银河SOHO中心的测量工作中利用Revit软件对图纸上的曲线特征点构建数据模型库,现场放样时将数据库中的坐标数据导入全站仪,直接进行放样。邹利群等[3]基于琴台美术馆任意双曲面壳体屋盖工程,借助测量机器人进行BIM放样,验证了测量机器人放样技术的优势。曹启光等[4]在异形钢结构测量施工中提出在钢结构定位安装中使用BIM+RTS测量机器人的测量方法,有效提高了放样精度及工作效率。方睿等[5-6]基于Revit二次开发对异形结构放样及变形监测进行深入研究,验证了Revit二次开发放样技术的优势。
各案例证明BIM技术在施工测量中有独有的优势,进行BIM技术结合异形结构测量施工研究,能有效提升异形建筑测量效率及精度。然而,对于多段圆弧结构测量的研究文献仍较少,鉴于此,本文结合陕西青年职业学院新校区项目,通过分析BIM技术+测量机器人工艺原理,分析其在多段圆弧结构测量的应用,以期为类似工程提供参考。
1 工程概况
陕西青年职业学院新校区位于西安市长安区常宁新区神禾三路以南,项目占地面积12.67万m2,建筑面积11.62万m2,包括试验实训楼、教学楼、综合楼、图书馆、教师办公用房、师生活动用房、会堂等多种建筑,主体为框架结构,地上5层,局部有地下室,项目效果如图1所示。
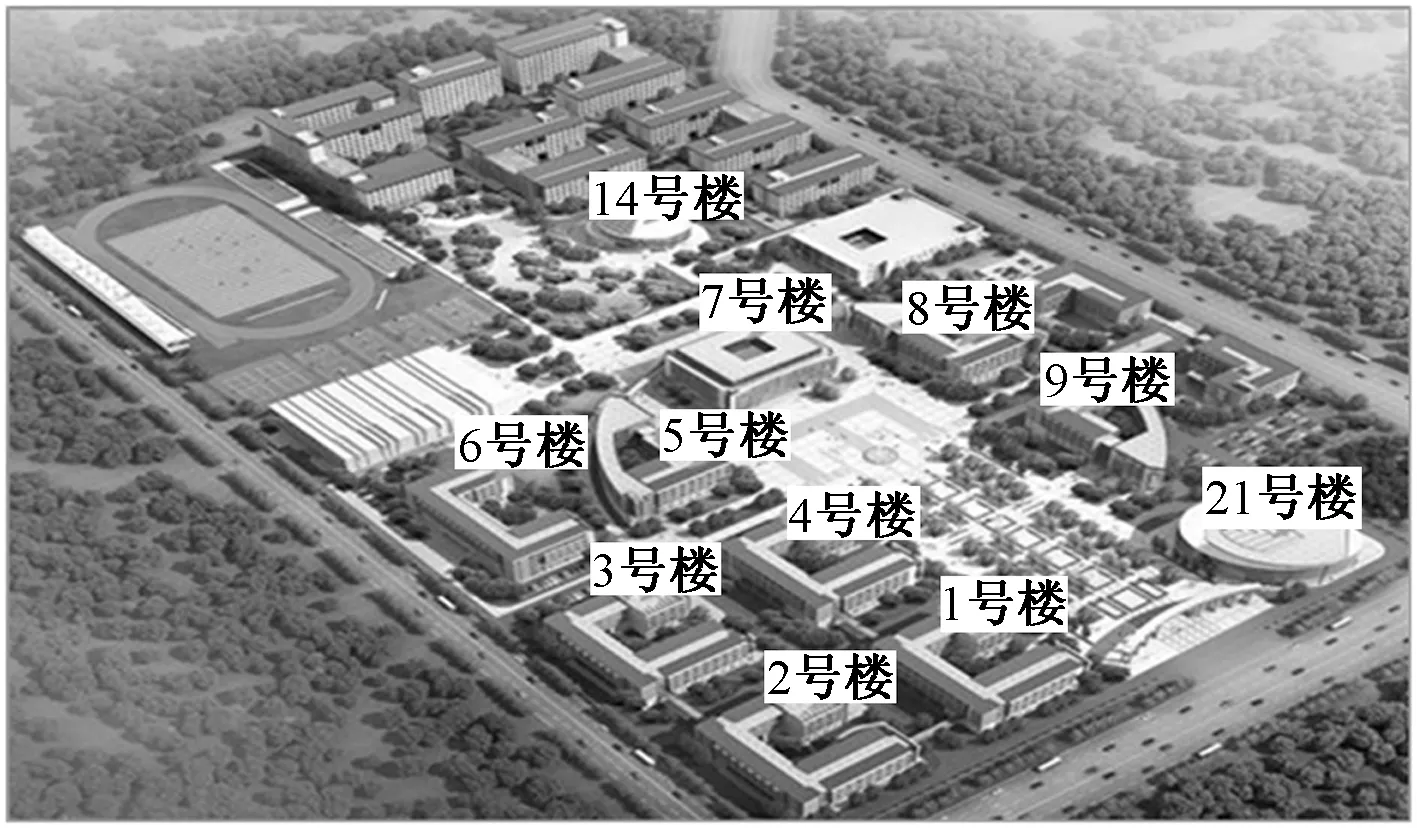
图1 陕西青年职业学院新校区项目效果
2 工程特点及难点分析
2.1 工程特点
本项目由12栋单体组成,其中5栋楼均为不同圆心圆弧结构。平面定位精度要求高,测量定位过程中坐标数据多、实测工作量大。
2.2 工程难点
1)本工程外立面由多段圆弧组成,外立面弧度的不断变换形成大量无规律空间点,无法有效通过传统方法定位点引测出空间点平面投影与楼层轴网的位置关系。
2)圆弧形建筑结构因其外部造型复杂、内部空间结构变换大,往往需要大量的定位点,且大部分定位点并不能通过已有的施工图纸资料获取,需通过一定的辅助手段才能实现空间转换部位控制点的平面定位。
3)圆弧形建筑控制点由平面引测至空间,往往缺少有效的引测参照,空间定位通常无法直接确定,且易出现定位误差。
3 测量关键技术
3.1 工艺原理
传统弧形结构测量放线工作主要依据解析几何法先进行内业计算,再使用经纬仪与钢卷尺进行联合放线。与其他几种方法相比较,基于BIM+测量机器人进行多段弧形结构放样测量具有测量精度高、速度快、内业计算量小的特点,其工艺原理如图2所示[7-8]。施工中,先确认放样工作内容,再建立 BIM 3D模型,通过调整模型坐标系,提取放样点坐标数据并导入测量机器人手簿,最后在现场架设测量机器人,进行建筑物放样测量。
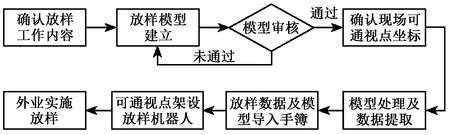
图2 工艺原理
3.2 设置项目基点
施工时用水准仪将甲方提供的BM1,BM2标高传递到D1,D2,D3区域,1号实训楼、2号教学楼及周边地下车库以D1标高作为±0.000以下施工标高基准点,6号综合楼及周边地下车库以D2标高作为±0.000以下施工标高基准点,并标明绝对高程,便于在施工中使用,如图3所示。
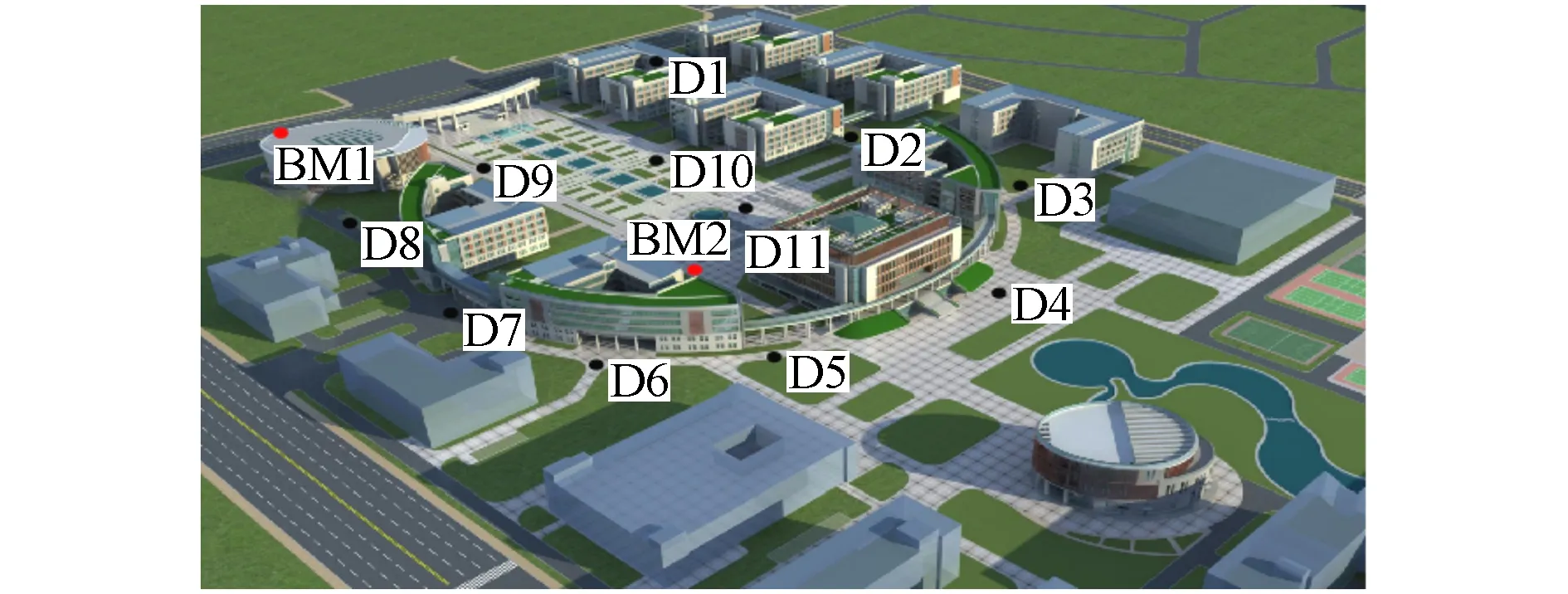
图3 项目基点设置
3.3 BIM模型建立及数据处理
项目将BIM模型与智能型全站仪进行集成应用,具体配置如表1所示。

表1 测量仪器配置
3.3.1坐标定位
在Auto CAD场地平面图中调出并解锁项目基点及测量点,使用Revit软件,以项目样板方式链接原始定位图,将项目定位图的任一已知坐标点置于项目基点并锁定。点击项目基点及测量点输入已知点坐标,Revit建模坐标定位如图4所示。

图4 Revit建模坐标定位
3.3.2BIM 3D模型建立
根据项目设定建模标准规则及图纸,使用Revit2016软件进行精细化模型建立。建立多段圆弧混凝土结构3D模型,如图5所示。
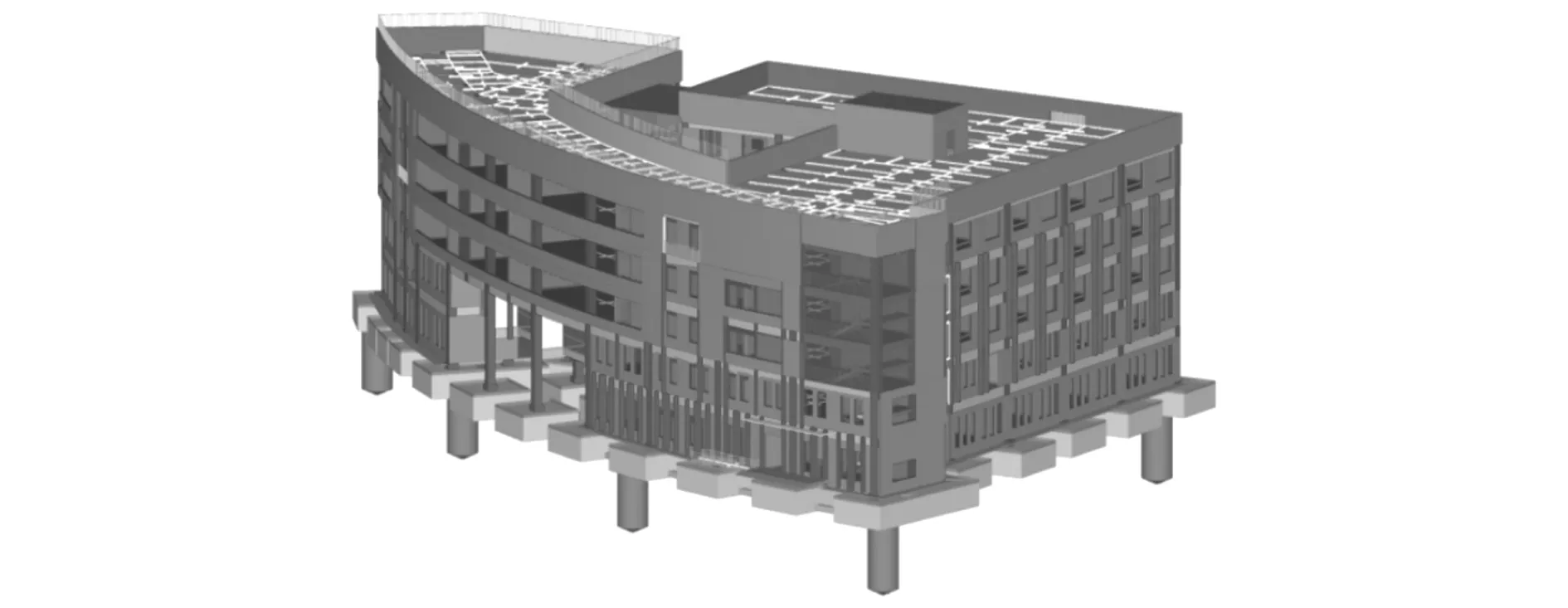
图5 BIM 3D模型
3.3.3创建并调整放样点
按构件类型创建放样点,根据不同构件类型放样点建立不同族库。多段圆弧结构具有多段复杂节点,其部分点位布设如图6所示。因此通过Revit自定义移动功能,分次移动圆弧弦线中点并量取至圆弧垂直距离进行调整,使多段圆弧形成近似圆弧形状,最终创建完成所有需要放样的点位。

图6 多段圆弧结构部分点位布设
3.3.4坐标数据转换
由于Revit2016中的定位模型坐标系与现场施工坐标系原点和坐标轴指向不一致,因此,BIM模型创建完成后需将放样点属性的坐标系、坐标值转换为施工坐标。使用文献[5]的坐标转换软件,将模型坐标系换算为施工坐标系,转换模型为:
(1)
式中:x,y为施工坐标;x0,y0为模型坐标;Δx,Δy为平移参数;m为缩放因子;θ为旋转角。
完成BIM放样点的创建后,对模型数据进行预处理,隐藏不需要的图元信息,并将模型转为IFC格式输出。
3.4 测量机器人现场放样测量
BIM坐标数据处理完成后,需在测量机器人放样系统中进行设站、任务创建及放样实施。测量机器人选用徕卡TS50,该仪器精度高、性能稳定,可自动搜索目标、精确照准目标、跟踪目标、自动测量、自动记录数据,并具有计算机远程控制等优异性能。
机器人测量放样系统主要由软件和硬件组成。软件用于从Revit软件中选取放样点坐标和数据处理,同时将经过格式转换的Revit模型坐标数据读取导入平板电脑中;硬件用于施工现场测量放样。
3.4.1仪器设站原理
放样测量时,从场地已知点出发,采用后方交汇法进行设站。使用平板电脑选取测量弧形结构部分各圆心位置及各段圆弧起止点位,设站原理如图7所示。
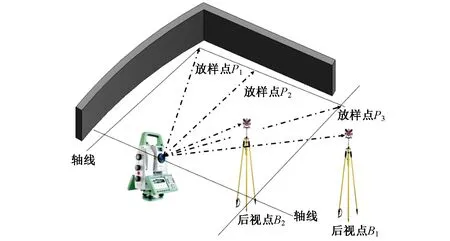
图7 设站原理
3.4.2仪器现场设站
BIM坐标数据处理完成后,首先,需在测量机器人放样系统中进行任务创建。其次,在徕卡TS50主菜单程序中打开测量功能,进入开始测量界面,进行设站工作,并输入设站点和定向点的点号、使用棱镜高度、点坐标等相关数据。
主要步骤如下:①在Autodesk Revit软件中安装插件Trimble Field Points,使用插件在模型中选取并设置点位;②在圆弧结构每隔1m标记1个坐标点,拾取待放样的坐标点进行自动编号并生成点坐标列表;③将所有坐标点和3D模型导入平板电脑,在平板电脑上安装Trimble Field Link软件;④在放样系统中进行现场放样,同时完成坐标点标记,指挥现场放样点设置。
3.4.3现场测量放样
利用测量机器人手簿进行现场测量放样,在手簿中可实时浏览导入的BIM 3D模型。在手簿中选取设定好的多段圆弧放样点,全程由平板电脑和放样软件控制,按手簿中的放样点实时显示圆弧点位编号、坐标及三维可视化模型数据,平板电脑中动态显示当前棱镜杆位置和目标位置信息,施工人员根据距离差别数值移动棱镜杆直至两者距离差别在允许范围内,即可确定放样点位并进行现场标记。

表2 实测数据和设计数据对比结果
测量机器人支持现场拍照,可自动保存放样数据和生成放样报告。在施工过程中,经过多次复测校核,确保点位精确,保证施工整体放样效果。
4 实施效果
4.1 数据对比分析
为验证BIM放样软件的精度,本文随机选取背景工程结构中的10组坐标,将测量的坐标点数据与理论数据进行对比,如表2所示。放样偏差基本在1mm以内,验证了测量放样精度满足要求。
4.2 效果分析
1)实测效率高 以半数圆弧梁为例,总长度60m,共60个点位,内业数据处理1人用时1h,现场人工投入2人,共用时2h。传统测量方法内业处理点位提取1人用时4h,现场放样4人,用时16h。因此,使用BIM+测量机器人可极大地降低测量工作人力及时间的投入,效率显著提高。
2)测量精度高 GB 50026—2020《工程测量标准》及 GB/T 12898—2009《国家三、四等水准测量规范》要求使用水准仪设备精度为±3mm,经纬仪设备精度为±2mm,钢尺设备精度为±1mm,2m靠尺设备精度为±1mm,塞尺设备精度为±1mm,在测量过程中还存在人为因素导致测量误差增大。自动测量机器人测量精度可达到±1mm,且不存在人为因素导致测量误差增大,较传统人工实测实量方式优势明显。
5 结语
将BIM+测量机器人技术综合应用于陕西青年职业学院弧形混凝土结构测量施工中,通过建立BIM模型,并将其坐标系数据转化为施工坐标,最后将施工坐标导入测量机器人工作簿,指导实际测量放样施工。工程实践证明,该技术对类似测点多、精度要求高的异形结构工程具有良好的应用价值,能提升工程管理信息化水平,大大提高多段圆弧异形结构测量放样精度及施工效率。
猜你喜欢
湖北植保(2022年4期)2022-08-23
建材发展导向(2022年4期)2022-03-16
土壤(2021年1期)2021-03-23
科学技术创新(2020年6期)2020-04-18
土壤学报(2017年5期)2017-11-01
汽车与安全(2017年7期)2017-08-03
汽车与安全(2017年6期)2017-07-25
汽车与安全(2017年5期)2017-07-20
制造技术与机床(2017年3期)2017-06-23
汽车与安全(2017年3期)2017-04-26
