HXD2机车重载牵引坡启黏着优化研究
2022-12-14 10:22傅雪军
大连交通大学学报 2022年5期
傅雪军
(中车大同电力机车有限公司 技术中心 ,山西 大同 037038)
HXD2型机车作为重载货运机车的典型代表,整车功率为9 600 kW,此机车已成为我国货运的主力车型之一.目前机车主要在安康、兰州等机务段担当货运牵引任务,运行区段存在长大坡道、气候多变等特点.目前HXD2型机车牵引力普遍超过4 500 t,在12‰以上坡道运行时至少需要700 kN牵引力,而机车最大启动牵引力为760 kN,此时机车牵引力的余量很小,受恶劣天气或者司机操纵方式等影响,极有可能造成黏着系数的降低,从而导致坡启失败,此时减少牵引力是抑制空转的唯一手段,这样又造成机车不能克服阻力启车或者提速,还有可能造成机车后溜.针对该机车的这种问题,本文从现象、空转检测和保护方法等方向进行分析,提高机车的黏着利用率,保证最大牵引力的发挥,成功实现长大坡道启动.
1 问题概述
图1为典型的坡道启动失败的试验数据,HXD2型机车牵引4 378 t货车在夏官营—新窑坡K66+500 m处停车,进行坡道(坡度12.1‰)启动.机车司机首先缓解小闸,然后推动手柄,将给定牵引力设定为650 kN,试验车开始有微小的动车现象.待牵引力发挥稳定之后缓解大闸,当列车管压力从353 kPa升到456 kPa时,机车有明显的动车趋势,但同时产生轻微的空转,此时通过黏着控制算法调整,对空转进行了抑制.
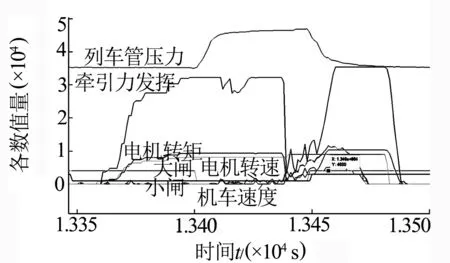
图1 坡道启动数据
随着列车的逐渐缓解,当列车管压力升到465 kPa时,试验机车受到较为明显的向后拖拉冲击,此时可以看出4个轴的电机转速和车速都因冲击产生了较大的同步冲击变化,产生较大加速度.现有黏着控制算法,将此同步冲击误判为空转,并进行牵引力卸载,然后开始缓慢恢复,在牵引力恢复过程中整个试验列车由于牵引力发挥不足,开始向后溜车,列车溜车后施加大闸非常规减压停车,最终导致坡启失败.
2 坡启失败原因
牵引电机发挥的动力通过黏着现象作用在机车上,形成有效的牵引力.从图2可知,在12‰的坡道满载情况下,尽管牵引力的余量很小,但如果黏着算法能及时调整启动时带来的空转问题,HXD2机车牵引4 500 t在12‰的坡道是能够实现启车的[1-4].
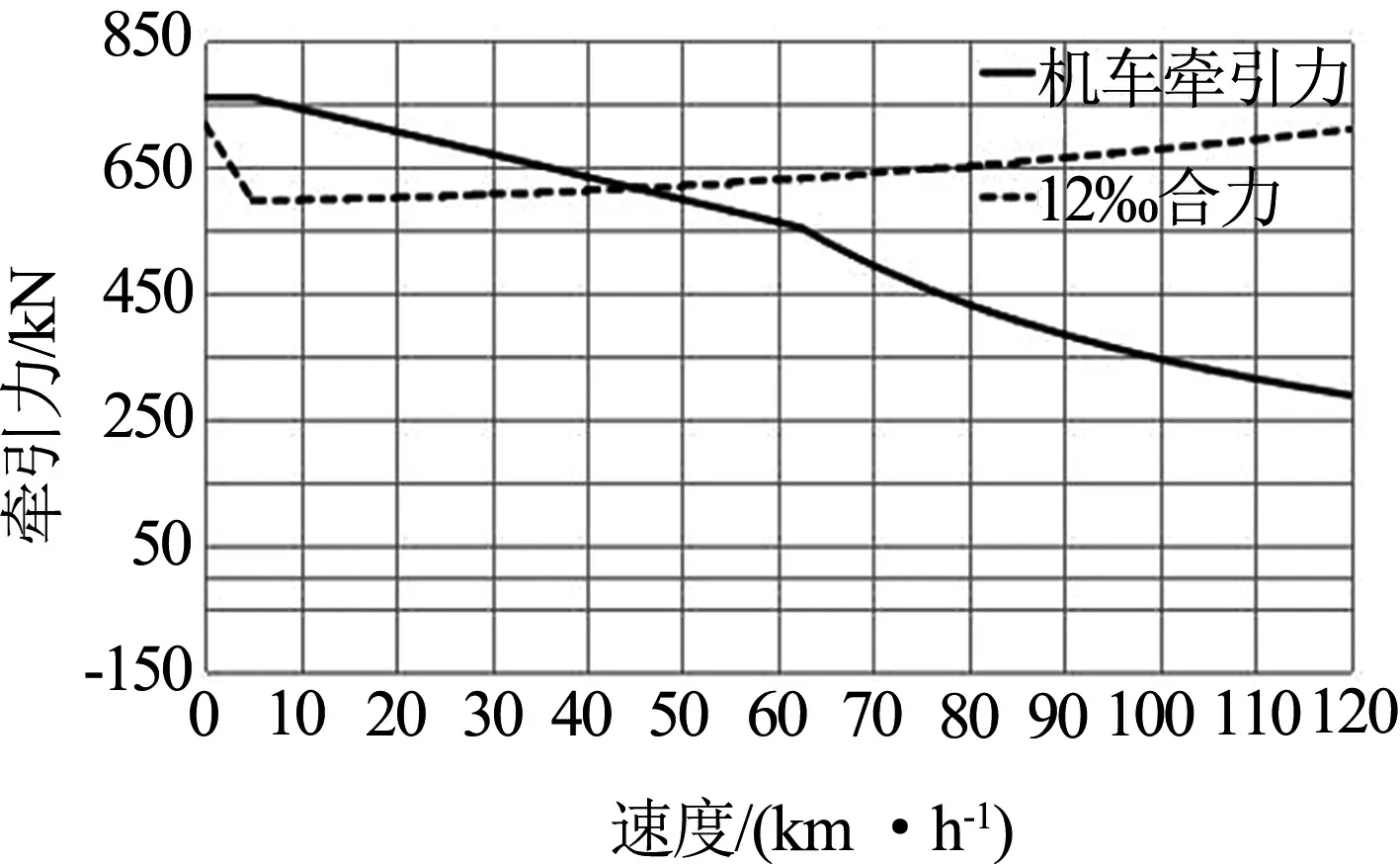
图2 12‰坡道HXD2牵引4 500 t全速度范围阻力
黏着控制采用组合黏着控制法,逻辑框图见图3.首先根据各个轴采集的电机转速和电机电流信号,经过滤波处理,基于轮对蠕滑速度、加速度及加速度微分等多方法组合对空转/滑行趋势进行识别,当相应的变量超过其预先设定的阈值后,判断为空转/滑行,之后根据检测的速度差、加速度等数据预测当前工况的最大黏着力,最终按空转滑行程度采用动态两段式转矩调整逻辑恢复转矩.
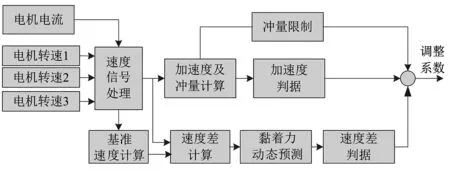
图3 黏着算法的逻辑框图
由于电机转速的采集以本轴、两轴、邻架两轴这三轴速度的最小速度为基准,所以同时出现多轴空转的情况,会导致黏着算法基准轴速度判断不准.空转误判,是出现坡启失败的原因,因此需对空转保护算法进行优化避免出现坡道启动失败.
3 算法优化
3.1 增加同步冲动识别策略
优化TCU软件,识别机车同步冲动,坡道启动机车产生同步冲动时降低牵引力卸载程度.
同步冲动加速度识别方案见图4.当速度小于4 km/h时,本轴加速度在0.6~1 m/s2,采用图4的同步冲动识别策略;当速度小于4 km/h,加速度大于1 m/s2时,采用正常的黏着控制策略;当速度大于等于4 km/h时,也采用正常的黏着控制策略.通过采集4个轴的转速,对4个轴的加速度进行计算得到机车加速度.当本轴加速度超出空转判定阈值时,将与机车加速度一起进行进一步判定,此时判断其二者的差值是否超出设定阈值,如超出则进行空转判定,进行黏着控制空转卸力;否则,认为是同步冲动,黏着控制程序不再动作.
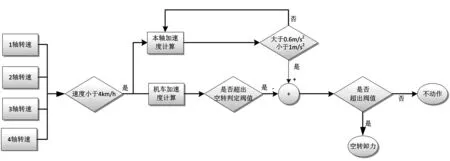
图4 同步冲动加速度识别方案
3.2 转矩调整策略优化
(1)降低空转后牵引力下降斜率,降低相同空转时间的牵引力下降程度.
黏着控制算法示意图,见图5.图中虚线和实线分别为优化前、后空转后的转矩调整曲线,从图中可知空转后的转矩下降斜率降低至优化前的0.5倍.此策略已于大同公司试验线路上进行过验证,其下降斜率与设计相一致,有效降低了空转后牵引力的下降速度和程度[5].
(2)缩短空转结束后等待时间,加快空转结束后牵引力的恢复斜率,以保证空转结束后牵引力能够快速恢复.
将阶段2设定为0.2 s,减少了空转结束后的牵引力恢复的等待时间,有助于牵引力的快速恢复.同时加大阶段3的恢复斜率,使得转矩恢复速度加快(将阶段3的恢复斜率提高1.5倍),此斜率与设计一致,有效提高了空转后牵引力的恢复速度.
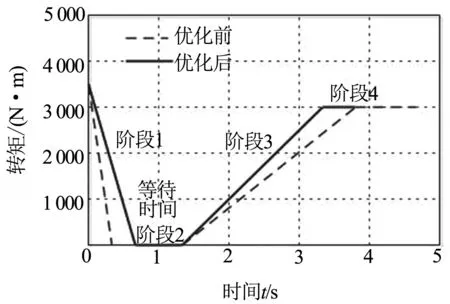
图5 黏着控制算法示意图
3.3 低速区加速度阈值优化
适当提高低速区加速度阈值,降低2 km/h以下的空转判定灵敏度.目前装车软件加速度阈值为0.6 m/s2,逐渐提高至0.75 m/s2,降低低速区空转时的牵引力卸载程度,提高低速区空转时牵引力的发挥.
4 半实物仿真验证
4.1 半实物仿真平台
半实物仿真(图6)采用恒润HiGale系统平台,整个半实物仿真平台模型包括弓网模型、四象限模型、逆变器模型、电机模型、动力学模型,模型通过Matlab软件建立,然后通过HiGale系统进行模型编译下载到半实物仿真平台上.采用真实的机车TCU控制器,被控对象比如电机运行环境部分采用实时数字模型在HiGale仿真机来模拟,进行整个系统的仿真测试.
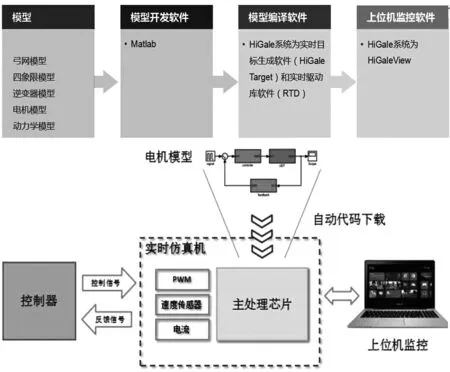
图6 半实物仿真
4.2 半实物仿真结果
机车动力学方程:
(1)
(2)
式中:M为机车质量;Fad为机车牵引力;Fd(vt)为机车运行中基本阻力,与机车速度vt成正比;a、b、c是与机械阻力相关的阻力系数;i为坡道阻力.
为了验证机车TCU软件的正确性,改变机车车体动力学模型相关参数,黏着系数μ从干燥轨面到潮湿轨面,再恢复到干燥轨面[6-9].
优化内容:减小超出加速度阈值较小时的牵引力下降量;优化低速下黏着控制算法第二阶段等待时间,最长为0.3 s;严重空转时,增加第三阶段空转恢复速度;识别机车同步冲动,当机车坡道起动产生同步冲动时,降低牵引力卸载程度;适当提高低速区加速度阈值.
图7为以现场数据为基础建立的仿真模型波形图,图8为黏着算法中加入了优化后的仿真模型波形图.图8中空转牵引力下降及恢复时间明显好于图7,可以看出机车牵引力得到迅速恢复,从而提高机车黏着利用率.
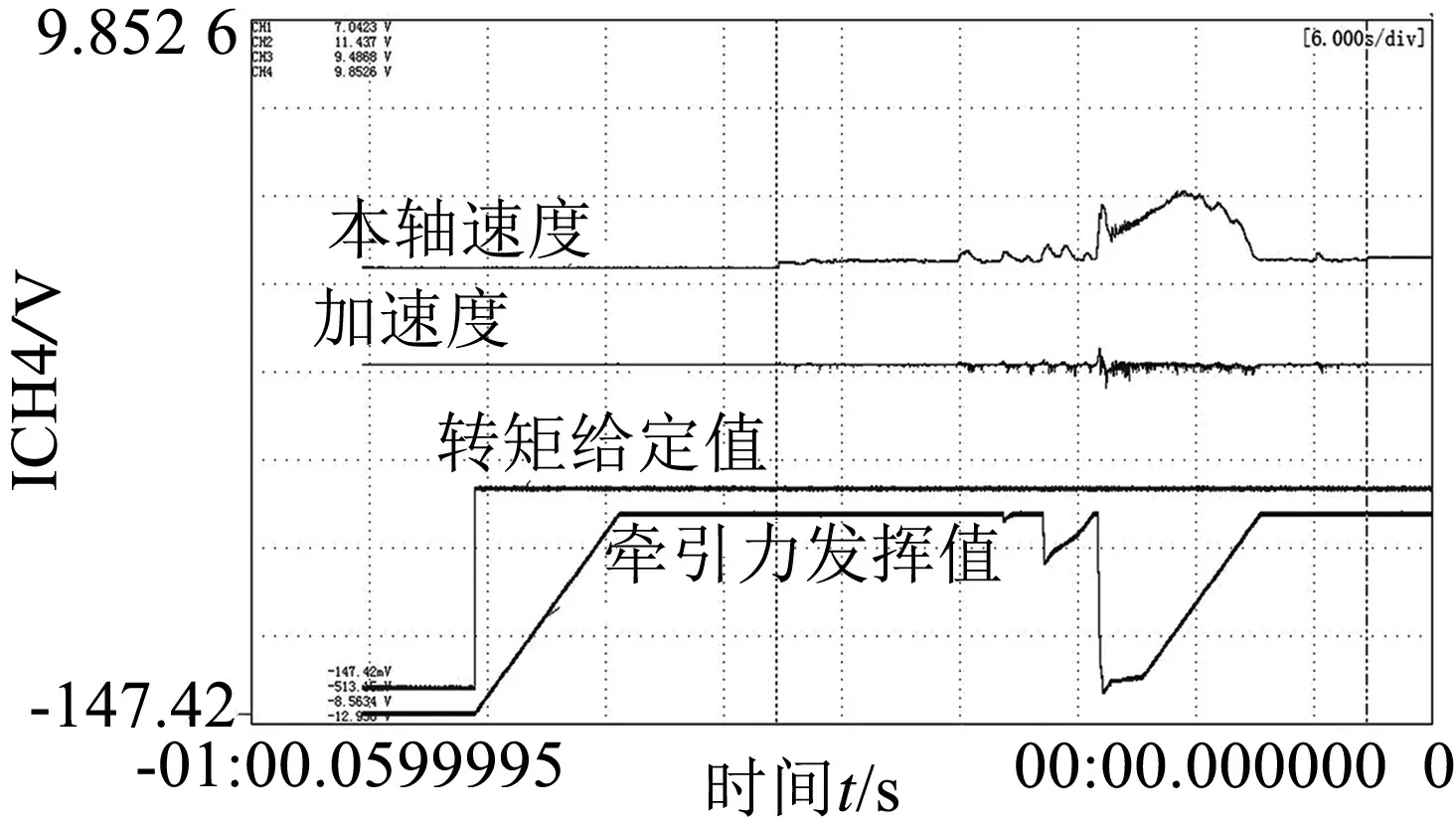
图7 线路试验数据仿真模型波形图
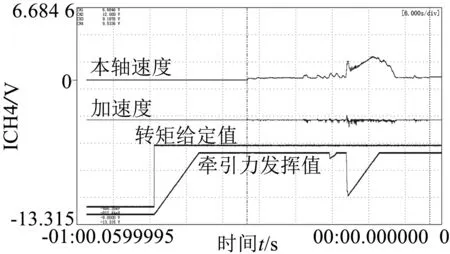
图8 优化后的仿真模型波形图
5 坡起试验
本文用优化后的软件对兰渝线进行了坡起试验,试验使用的HXD2型机车牵引质量为4 400 t,坡启试验波形图见图9.从起动工况可以看出,速度上升平缓,牵引力基本没有大卸载,速度上的毛刺明显减少,说明软件优化后,保护超前,避免了空转发生.从11 600 s到12 100 s,速度上升较快,提速抢道能力明显提升,因此可以认为软件优化的方向是正确的.

图9 坡启试验波形图
6 结论
在重载和高速货运机车运用过程中,其黏着利用控制软件的水平直接决定机车的牵引性能.本次软件优化针对坡启,从多方面提高机车启动黏着利用率,预防坡停事故发生.从理论和半实物仿真上得到了验证,并在正线上实施,验证方案的可行性,取得了良好的效果.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
露天采矿技术(2022年1期)2022-02-20
中学生数理化·八年级物理人教版(2021年9期)2021-11-20
攀枝花学院学报(2021年5期)2021-10-19
哈尔滨铁道科技(2020年3期)2021-01-18
山东工业技术(2018年5期)2018-03-10
大陆桥视野·下(2017年9期)2017-09-17
中学生数理化·高一版(2016年4期)2016-11-19
物理与工程(2016年3期)2016-08-31
学习月刊(2015年1期)2015-07-11