双惯导联合旋转调制光纤陀螺标度因数误差自校正方法
2022-12-16 14:01崔加瑞吴文启马铁锋王茂松季承俊
中国惯性技术学报 2022年5期
崔加瑞,吴文启,马铁锋,2,王茂松,季承俊
(1.国防科技大学 智能科学学院,长沙 410073;2.西安精密机械研究所昆明分部,昆明 650000)
对于水下长航时自主导航的技术需求,光纤陀螺旋转调制惯导系统具有性价比高的技术优势。但由于光纤陀螺的光纤环温度特性不理想,存在标度因数逐次启动重复性和长期稳定性问题,影响了光纤陀螺旋转调制惯导系统的长航时自主导航精度。
旋转调制方法是消除惯导系统确定性误差对系统影响的有效手段,单轴周期往复旋转调制方法可以抵消水平方向惯性器件零偏引起的累积误差,合理的双轴或多轴旋转调制方法可以抵消三轴方向的确定性零偏的影响,提高捷联惯性导航系统定位精度[1],但是对于陀螺标度因数误差来说,旋转调制并不能直接抵消掉地球自转与其耦合的影响[2],[3]。同时,陀螺标度因数误差也会与船体角速度以及惯性测量单元旋转调制角速度耦合产生短时动态误差。
常用的标度因数误差的外场标定方法为在码头启动时进行系统级标定估计陀螺标度因数误差[4],[5],在航行过程中不再估计,例如Gao 提出一种三轴旋转调制的方法,可以实现对三轴惯性器件误差的自标定[6]。但是光纤陀螺捷联惯导系统的标度因数误差会存在较为明显的时变特征,实际导航过程中,由于没有外界参考基准,仅凭单套旋转调制惯导系统难以标定出标度因数误差。为提高可靠性,载体通常配备多套高精度旋转调制航海惯导系统,利用多套惯导系统的冗余信息能够使得惯导系统内部的部分系统性误差得到估计,例如Bird 使用两套惯导系统对导航系统内部误差进行检测实现故障诊断和隔离[7];Wu 使用两套惯导系统对器件误差进行在线估计[8];刘为任使用两套旋转调制惯导系统的速度位置观测对惯性器件误差进行估计和补偿,减小了主惯导的速度误差,提高了子惯导的传递对准精度[9];王林则利用双轴和单轴旋转调制激光陀螺捷联惯导联合,提升了冗余配置双惯导的导航系统的定位精度[10]。但是对于冗余配置多套旋转调制光纤陀螺惯导系统的标度因数误差在线估计方法还缺乏研究。
针对光纤陀螺标度因数逐次启动重复性和长期稳定性问题,在线估计光纤陀螺标度因数误差的难点在于如何找到相应的观测信息。本文提出一种双惯导系统联合旋转调制光纤陀螺标度因数误差自校正方法,对两套三轴光纤陀螺惯导系统的旋转调制策略进行联合编排,在导航过程中根据两套三轴旋转调制光纤陀螺惯导系统水平旋转轴单位矢量之间的夹角为可预先标定的常值,结合两套惯导系统提供的实时姿态信息,建立观测方程,进而在导航过程中在线估计出两套惯导系统中各陀螺的标度因数误差,并使用输出校正的方式进行定位误差的补偿。半实物仿真实验和实际转台实验均验证了本方法的有效性,抑制了由于标度因数误差产生的定位误差随时间增长的趋势,提高了定位精度。
1 两套光纤陀螺惯导三轴联合旋转调制编排策略
三轴旋转调制编排方案采用连续旋转的方式。IMU的x、y、z轴为前右下方式,内框轴(In)与IMU 的x轴(横滚轴)方向基本一致;内框轴转角为零时,中框轴(Mid)与IMU 的y轴(俯仰轴)方向基本一致;内框轴和中框轴转角均为零时,外框轴(Out)与IMU 的z轴(方位轴)方向基本一致。
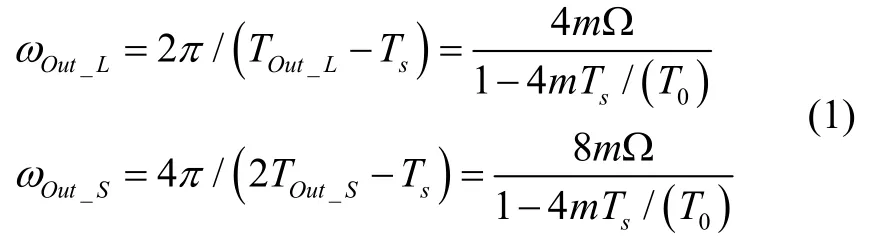
调制周期需要远离舒勒周期[11](约84.4 分钟),中框轴旋转调制角速率ωMid=±Ω,内框轴旋转调制角速率Inω=±Ω,其中Ω 为可选取的旋转调制角速率的基本单位,则对应的基本旋转周期为:TIn=TMid=2π/Ω=T0,T0表示内框或中框轴从零位转动一周又回到零位的时间。外框轴交替采用两种旋转调制周期:TOut_L=T0/(4m),TOut_S=T0/(8m),下标L和S分别代表长周期和短周期,对应的角速率:
m>> 1为整数倍数,且有T0=m(2TOut_L+4TOut_S)。令Ts=1 s,三个旋转轴初始角度均为0 °时,可以得到如图1-2 所示的两套惯导的三个轴向的角度位置曲线以及相应的观测点时刻。设k=0,1,2...,p=0,1,2...,q=0,1...(m-1)均为整数,根据图1-2,三个旋转轴的角速率可以表示为以下分段函数。
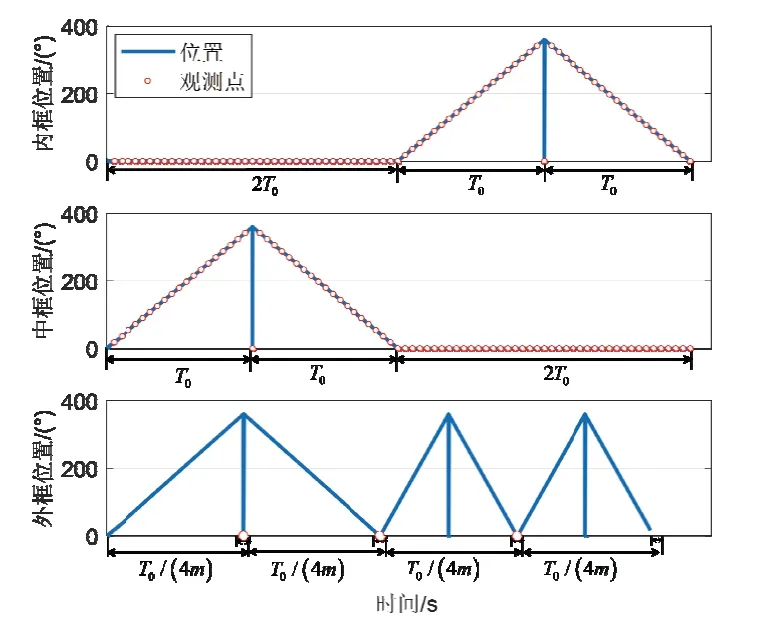
图1 第1 套惯导三框轴角度曲线图Fig.1 The axis angle curves of the first INS
第1 套惯导内框轴和第2 套惯导中框轴:
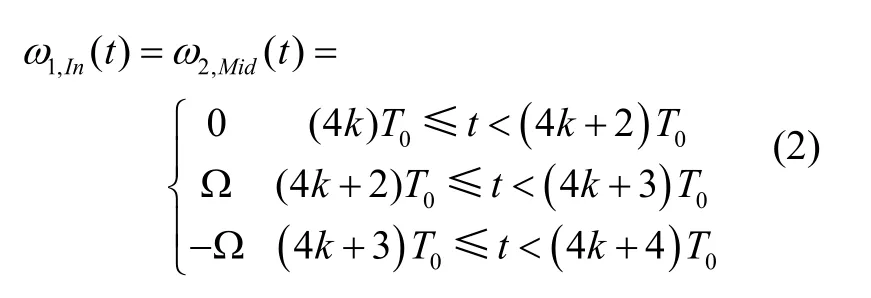
第1 套惯导中框轴和第2 套惯导内框轴:
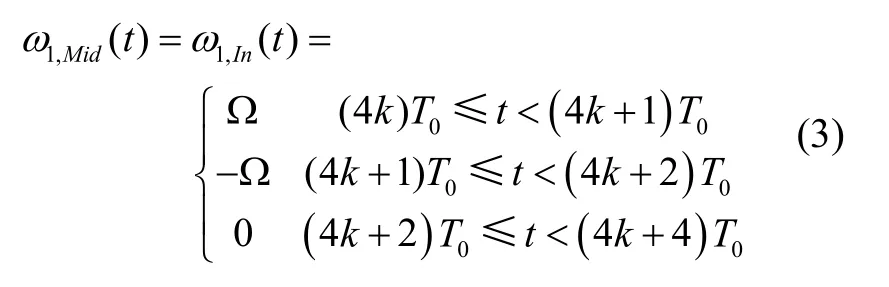
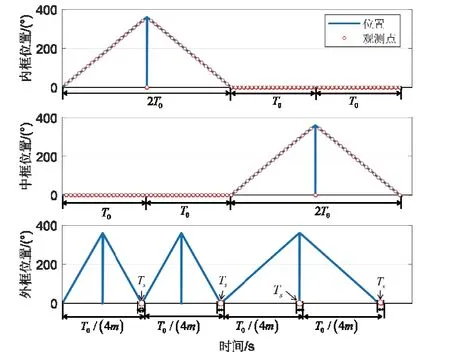
图2 第2 套惯导三轴角度曲线图图Fig.2 Thee axis angle curves of the second INS
第1 套惯导外框轴:
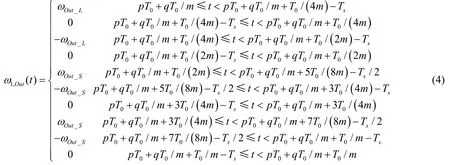
第2 套惯导外框轴:
以上两套惯导系统的的三轴角度分段函数有以下规律:相对于外框轴的快速转动,内框和中框的轴向转动相对缓慢得多,在两个水平轴完成一一次周期转动动时,外框轴已经完成多次连续往复旋转。当两套系统的的外框同时回到原位,在外框轴静止的 Ts秒内,第1套惯导系统的中框轴与第2套惯导系统的的内框轴夹角为常值(或第1套惯导系统的的内框轴与第2 套惯导系统的中框轴夹角为常值),且均处于与外框框轴正交的位置。可通过预先标定获得内框轴、中框轴(内框轴转角锁定在0 °位置时)在相应IMU 载体坐坐标系下的单位矢量。观测时刻对应旋转轴在同一参考坐标系中的单位矢量点积等于其夹角的余弦,为可通过预先标定确定的常值,从而以此为参考基准,构建滤波波器的观测方程,可以实现标度因数误差的的估计。由于停止时间Ts极短,因此基本不影响纯惯性导航过程中旋转调制抑制误差的整体效果。
2 联合旋转调制陀螺标度因数误差估计算法
2.1 系统状态方程
地心地固(Earth-Centered Earth-Fixed,ECFF)坐标系中,两套旋转调制惯导系统的姿态误差方程分别表示为:
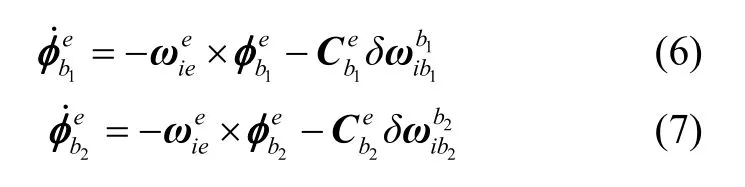
式(9)中未考虑陀螺的常值零偏,原因在于其在连续旋转调制过程中被抵消,难以得到精确估计,纳入滤波器反而增加滤波器维数,增加了计算量,因此忽略陀螺的常值零偏。
两套惯导系统的标度因数误差微分方程建模为一阶马尔科夫过程:

其中,τ1,τ2分别为标度因数误差的相关时间。
选取ECEF 系下的两套惯导系统姿态误差的差值以及两套惯导系统的陀螺标度因数误差作为滤波器状态:

基于式(8)-(11),在ECEF 系下构建卡尔曼滤波器的状态方程如下:


其中,×代表矢量叉乘运算,同时也可以表示将矢量转化为斜对称矩阵。
2.2 系统状态观测方程
通过预先标定,可确定两套旋转调制惯导系统内框轴单位矢量在IMU 载体坐标系下的投影:
当内框轴锁定在0 °位置时,中框轴单位矢量在IMU 载体坐标系下的投影也可以预先标定:
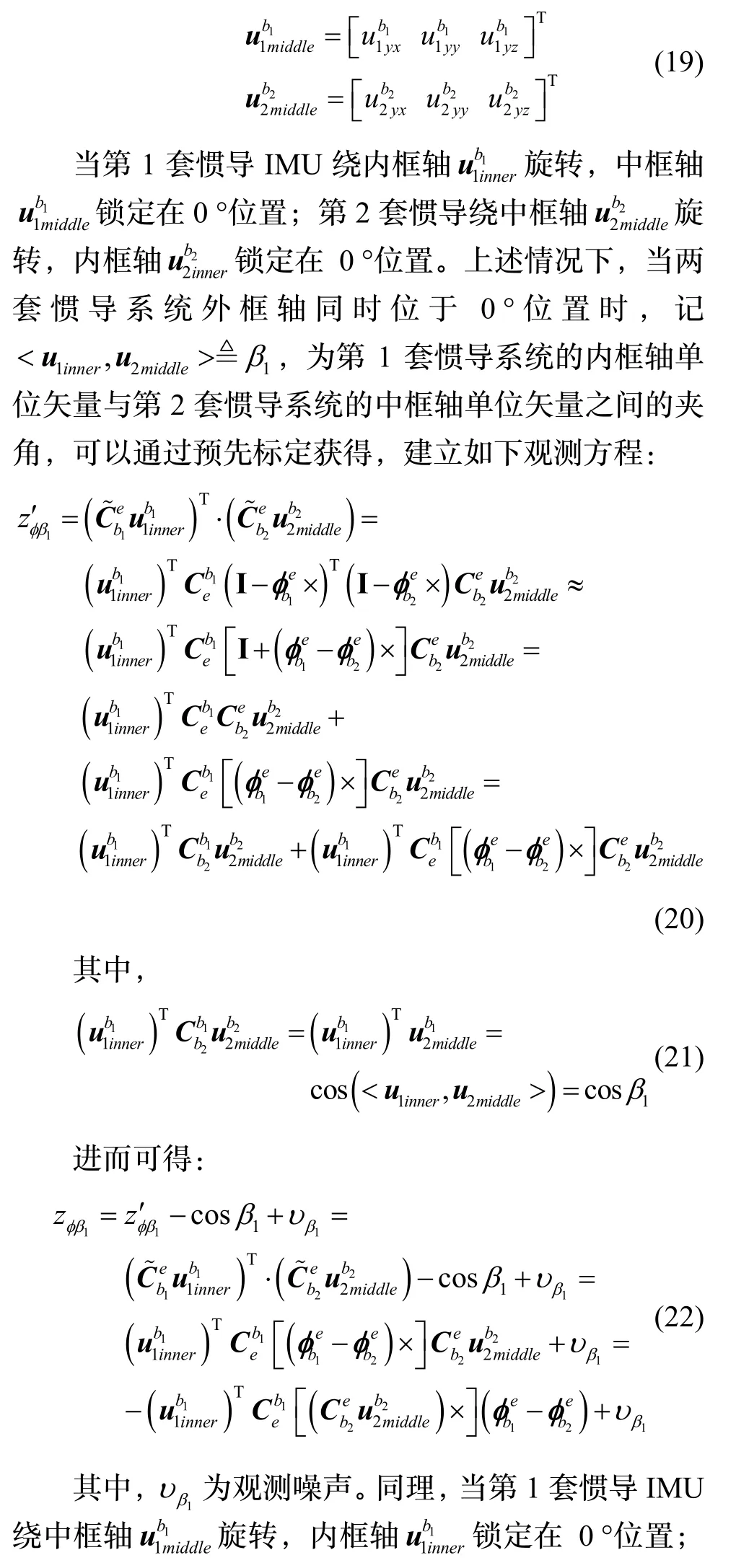
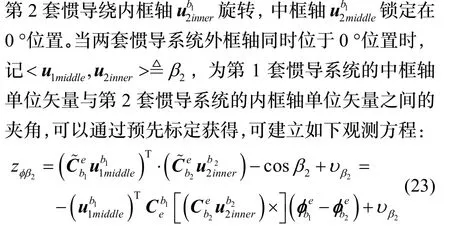
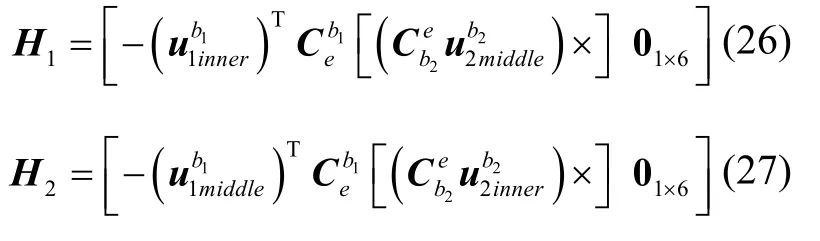
根据式(22)(23)构建卡尔曼滤波器的观测方程,如下:
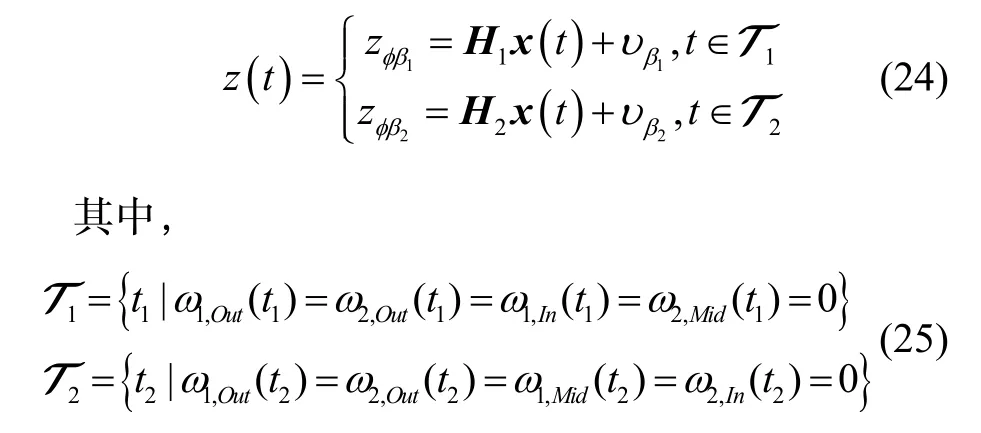
由于方位轴的定位重复性可以由机械加工精度保证,因此观测噪声可以取角秒量级,观测矩阵如下:
卡尔曼滤波器整体采用开环估计方式,即可估计出标度因数误差。
2.3 输出校正补偿定位误差
采用输出校正的方式对惯导系统的定位误差进行补偿,有利于维持原惯导系统的独立性,输出校正的流程图如图3 所示。
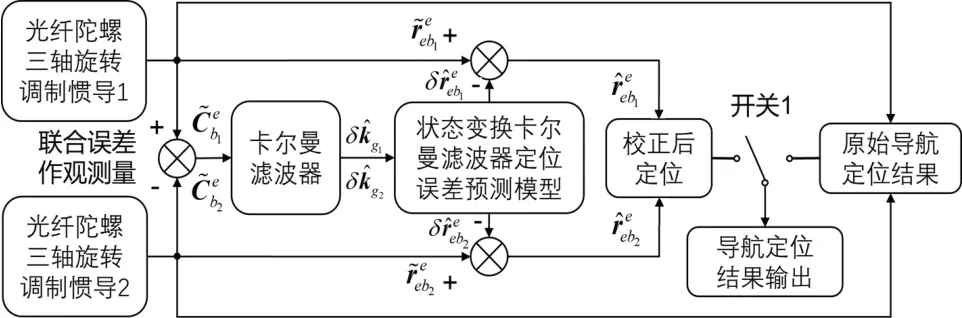
图3 输出校正定位误差补偿Fig.3 Output correction for positioning error compensation
第1 套惯导系统的误差状态可以表示为:

第1 套惯导系统其误差状态动态模型可以表示为:
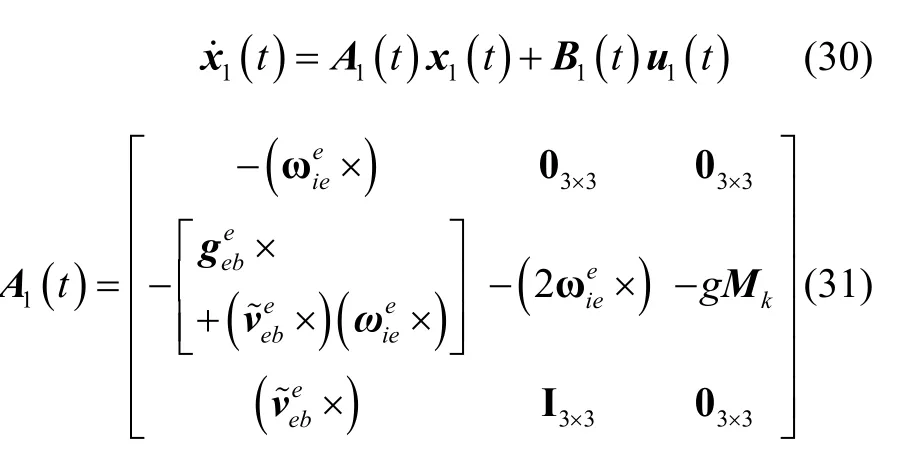
其中,g为当地地球重力模值,M k的形式如下:

其中RE,h,e为当地卯酉圈半径,大地高度和地球偏心率。

采用与第1 套惯导系统其定位误差预测方法相同的方法,可以完成第2 套惯导系统的定位误差预测。
2.4 垂直通道误差处理与高纬度适应性说明
由于航海导航常用经纬度作为直观的位置显示,因此在中低纬度,本算法输出校正量可转换为当地经度修正量δλ和纬度Lδ修正量;在高纬度,输出校正量可转换为横经度修正量δλt与横纬度修正量δLt[11]。需要在输出校正模型中扣除垂直方向的速度和位置误差估计值,因为垂直通道的误差估计值是发散的。参见文献[11],定义当地水平面法向量:

即可消除状态变换速度误差和位置误差的垂直分量,只校正补偿状态变换速度误差和位置误差的水平分量。
2.5 从姿态矩阵中提取陀螺输出的方法
注意到式(14)中含有角速度项,在现有的导航系统中一般不会输出原始陀螺数据,因此本文通过等效旋转矢量和方向余弦矩阵的关系来得到载体角速度,当惯导系统输出的方向余弦矩阵的频率为100 Hz 时:

3 半实物仿真实验
为了验证所提出方法的有效性,首先进行三轴旋转调制仿真实验。通过地球自转角速度和三轴角速度计算惯导系统的三个轴向上的角速度分量理论采样数据,并将实际采集的360 h 惯导系统静态噪声数据(含缓慢漂移数据)加在生成的理论采样数据上,最后添加惯性元件的常值零偏和标度因数误差,具体的误差参数如表1所示。
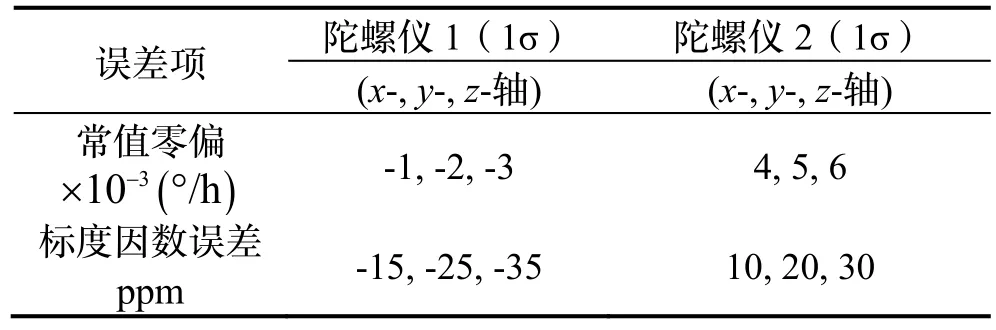
表1 半实物仿真误差参数Tab.1 Semi-physical simulation error parameters
仿真中给定两套惯导系统的定位机构观测噪声为2 ″,即航向转位机构的定位重复性为2 ″,标度因数误差估计结果如图4-5 所示。

图4 第1 套惯导陀螺标度因数误差估计结果Fig.4 FOG scale factor error estimation result of the 1st INS

图5 第2 套惯导陀螺标度因数误差估计结果Fig.5 FOG scale factor error estimation result of the 2nd INS
可以看出在5 h 内标度因数误差估计已经稳定,这个时间为一个完整的旋转调制周期的时间,即4T0。其中两套光纤陀螺惯导系统的三轴陀螺标度因数误差估计结果如表2 所示。

表2 标度因数误差估计结果Tab.2 Scale factor error estimation results
在标度因数误差估计稳定后,使用输出校正补偿定位误差,离散化时间选为10 ms,结果如图6-7 所示。
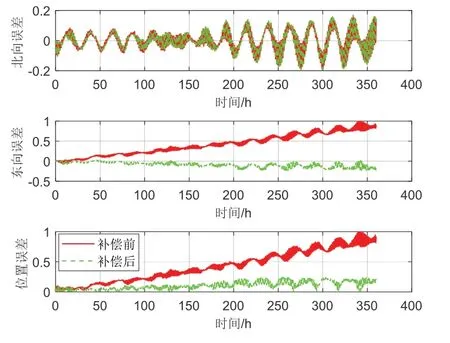
图6 第1 套惯导陀螺标度因数误差补偿前后位置误差Fig.6 The position error of the 1st INS before and after FOG scale factor error compensation
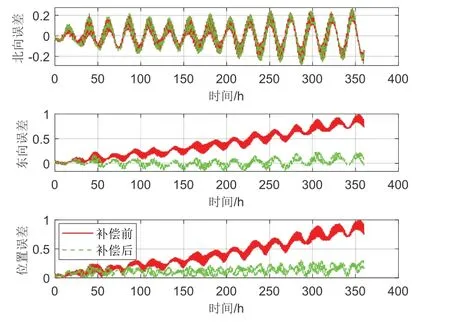
图7 第2 套惯导陀螺标度因数误差补偿前后位置误差Fig.7 The position error of the 2nd INS before and after FOG scale factor error compensation
图6-7 以最大定位误差为归一化单位,从结果可以看出,第1 套惯导定位误差最大值从1 降到0.2152,第2 套惯导定位误差最大值从1 降到0.3118。补偿前由于标度因数误差造成两套惯导系统的北向误差呈现为周期振荡,东向误差呈现为随时间线性增长。经过输出校正补偿后,在360 h 内由于标度因数误差造成的线性增长的东向误差完全被补偿,最终得到的定位误差结果仅为周期振荡项。
4 三轴模拟转台实验
本文使用高精度光纤陀螺惯导系统和三轴模拟转台进行双惯导三轴旋转调制实验,其主要参数如表3所示。

表3 光纤陀螺捷联惯导系统主要参数Tab.3 Main parameters of FOG-INS
实验使用的三轴模拟转台的定位精度为±2 ″。实验分为两个时间段分别执行两套惯导系统的旋转调制方案以模拟两套独立的光纤陀螺捷联惯导系统。两次实验各采集300 h 数据,利用本文提出的方法,得到两套惯导标度因数误差计算结果如图8-9 所示。
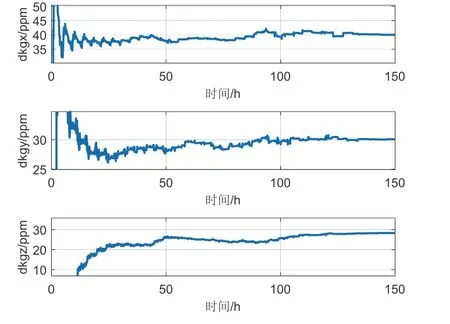
图8 第1 套惯导陀螺标度因数误差估计结果Fig.8 FOG scale factor error estimation result of the1st INS
在估计300 h 结束时刻,两套三轴旋转调制惯导的标度因数误差分别为:39.29 ppm、25.72 ppm、34.40 ppm;37.37 ppm、19.29 ppm、31.55 ppm。相比于仿真的常值误差,实际采集数据的标度因数误差呈现出较为明显的波动。存在两种可能的原因:一是标度因数误差随时间和温度具有漂移性,300 h 内的标度因数误差漂移达到10 ppm;二是实际数据中含有的噪声较大,导致收敛速度较慢。
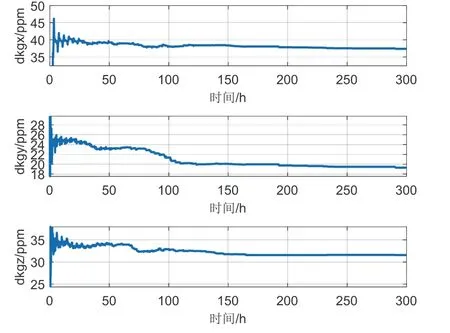
图9 第2 套惯导陀螺标度因数误差估计结果Fig.9 FOG scale factor error estimation result of the 2nd INS
本实验实际选择的输出校正时刻为滤波稳定时刻,输出校正离散化步长为10 ms。得到的输出校正结果如图10-11 所示。
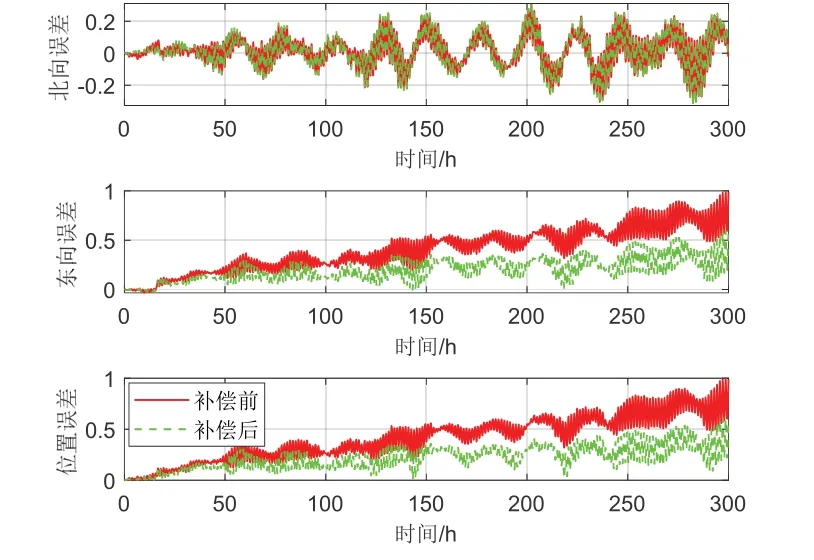
图10 第1 套惯导陀螺标度因数误差补偿前后位置误差Fig.10 The position error of the 1st INS before and after FOG scale factor error compensation
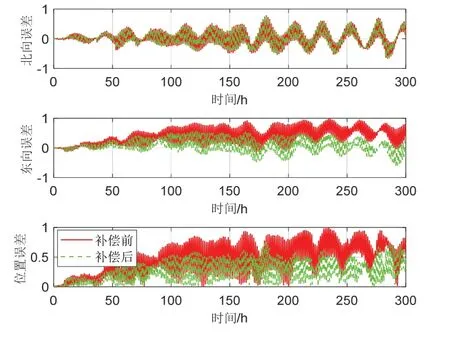
图11 第2 套惯导陀螺标度因数误差补偿前后位置误差Fig.11 The position error of the 2nd INS before and after FOG scale factor error compensation
可以看出,对标度因数误差进行输出校正能够将东向随时间线性增长的定位误差部分补偿掉,第1 套惯导定位误差最大值从1 降低到0.60,误差减小了40 %;第2 套惯导定位误差最大值从1 降低到0.75,误差减小了25 %。当进行长航时航行时,未补偿的两套惯导系统的标度因数误差会造成东向位置误差的线性增长,而补偿后东向位置误差线性增长得到一定程度的抑制。
5 讨论与结论
针对光纤陀螺标度因数误差逐次启动重复性问题以及长期稳定性问题,为克服光纤陀螺标度因数误差对旋转调制航海惯导精度的影响。本文提出了一种双光纤陀螺惯导系统联合旋转调制标度因数误差自校正方法。该方法能够不依赖外界参考信息,估计三轴光纤陀螺的标度因数误差,并利用输出校正方法实现定位误差的实时补偿,仿真结果表明本方法的陀螺标度因数估计精度优于1 ppm;300 h 的长航时实际惯导系统转台实验结果表明,经过输出校正后的两套三轴旋转调制光纤陀螺惯导系统定位最大误差分别减小了约25 %和40 %。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
小学生学习指导(中年级)(2021年3期)2021-04-06
小学生学习指导(低年级)(2020年9期)2020-11-09
中国建材科技(2020年6期)2020-03-23
小学生学习指导(中年级)(2018年9期)2018-11-29
北京航空航天大学学报(2018年1期)2018-04-20
科技经济市场(2017年5期)2017-09-16
中国惯性技术学报(2017年1期)2017-06-09
小学生学习指导(高年级)(2017年3期)2017-02-17
河北工业大学学报(2016年6期)2016-04-16