基于多芯光纤复用技术的光纤陀螺方案
2022-12-16 14:01杨晟旻徐宏杰孙胜琳梁佳辉
中国惯性技术学报 2022年5期
杨晟旻,徐宏杰,孙胜琳,梁佳辉
(北京航空航天大学仪器科学与光电工程学院,北京 100191)
光纤陀螺是一种基于萨格纳克(Sagnac)效应的角速率传感器[1-5],已成功应用于航空、航天、船舶、钻井等军用及民用领域。但光纤陀螺的发展也遇到了瓶颈。因为光纤陀螺的精度与光纤环长度成正比,0.0001 °/h 的光纤陀螺光纤环长度一般要10 km,如果继续增加光纤环长度会增加光纤环绕制的难度,光纤环的温度性能也会劣化,且不适应光纤陀螺高精度小型化的使用需求。虽然近年来采用强度噪声对消可抑制一部分陀螺噪声,但光纤陀螺精度只能提高30%~50%[6-10],且无法有效减小光纤陀螺体积。
近年来,多芯光纤技术已经成熟[2],并开始在光通信系统中应用[11-17],大大提高了通信容量。本文提出一种设想,采用多芯光纤绕制光纤环,并通过特殊的耦合方式,使光在多芯光纤中往返传输,从而增加光纤环的有效长度,提高光纤陀螺的精度。本文以六芯光纤为例,分析了光在六芯光纤中的传播特性[18-21],并对耦合方式和偏振态控制[22-28]进行分析,理论推导得出对于0.001 °/h 光纤陀螺,使用六芯光纤的光纤陀螺的测量精度可以提高至原来的6 倍。而在实际制造过程中,虽然由于光纤环存在熔接点,会带来一定程度的损耗和偏振串扰导致精度有所下降,但是仍能在不改变光纤环尺寸的前提下大大提高测量精度,对高精度光纤陀螺的小型化具有重要意义。
2 多芯复用光纤陀螺原理
干涉式光纤陀螺基于sagnac 效应对系统的角速度进行检测。光纤陀螺的测试精度表达式如式(1)所示。
其中Ω为物体的角速度,λ为光源中心波长,c为光速,L为光线传输长度,D为光纤直径。由于中心波长λ由光源确定,所以光纤陀螺的测试精度由光纤传输长度L决定,L越大,Ω越小。因此光线在光纤环中的等效传输长度越长,光纤陀螺的测试精度越高。
从式(1)中可以看出,在波长一定的情况下,光纤陀螺的灵敏度与L和D之积成正比,目前光纤陀螺的相位检测精度已达10-8rad,进一步提高的潜力不大。采用多芯光纤绕制光纤环,光在每个纤芯中都传输一个周期,相当于有效光程增加了数倍,从而大大减小0.001°/h 光纤陀螺的光纤环尺寸。
基于此理论,使用多芯光纤制成光纤环,使得输入光纤环的两束光线分别按照顺时针和逆时针的顺序在多芯光纤的纤芯中一次传输,最终将除了中心纤芯以外的每个芯都传输一周。使用多芯光纤环的光纤陀螺的光路结构如图1 所示。
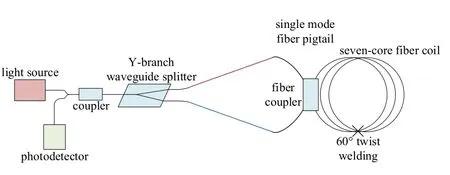
图1 多芯光纤陀螺光路结构示意图Fig.1 Schematic diagram of optical path structure of multicore fiber-optic gyroscope
由图1 可知此光路方案与传统方案相比,其光源、探测器和Y 波导基本相同,但在Y 波导输出端增加了耦合器。且光纤环首尾相接,并连接在耦合器上,以此实现光线的复用和往返传输。
3 六芯光纤的光传输情况分析
通过使用六芯光纤改进光纤陀螺的光纤环部分,六芯光纤是在一个共同包层中存在六根纤芯的光纤,纤芯之间的间隔距离足够大,保证纤芯之间不产生光耦合现象,每个纤芯都可以独立传输光信号,此结构可以提升光纤单位面积的集成密度,其结构如图2 所示。
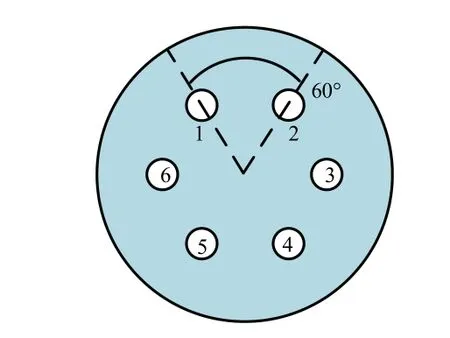
图2 六芯光纤结构示意图Fig.2 Six-core fiber structure diagram
由图2 可知,其中六个纤芯以端面圆心为中心进行中心对称均匀分布,所以外部的六个纤芯两两之间与中心连线的夹角为60°。在光线传输过程中,六个纤芯作为一个循环进行传输。
由于六芯光纤集成密度高且可以用于光信号传输,所以拟使用六芯光纤作为光纤环的原材料。通过绕制光纤环的过程中首段和尾端扭转60°,使得第一次在1 号纤芯中传输的光纤在光纤环中传输一周后进入2 号纤芯,之后完成传输后再分别进入3 号、4 号、5 号和6 号纤芯中传输,最终在六个纤芯中依次完成传输后输出并发生干涉。可见在同等规格的光纤环中,使用六芯光纤可以使得光线在光纤环中的传输距离L提高到6L。由式(1)可知,使用六芯光纤可以使光纤陀螺的理论测量精度提高为原来的6 倍。
依据六芯光纤的结构特性,设计闭合的六芯光纤环。令六芯光纤尾端相比于首端顺时针扭转60 °,首端和尾端熔接在一起,保证纤芯分别对准,制成的光纤环结构示意图如图3 所示。
由图3 可知,尾端相较于首端旋转了60 °实现了纤芯对轴,熔接成闭合光纤环。即首端1 位置与尾端6 ′位置对应熔接,其他纤芯的对应关系以此类推。
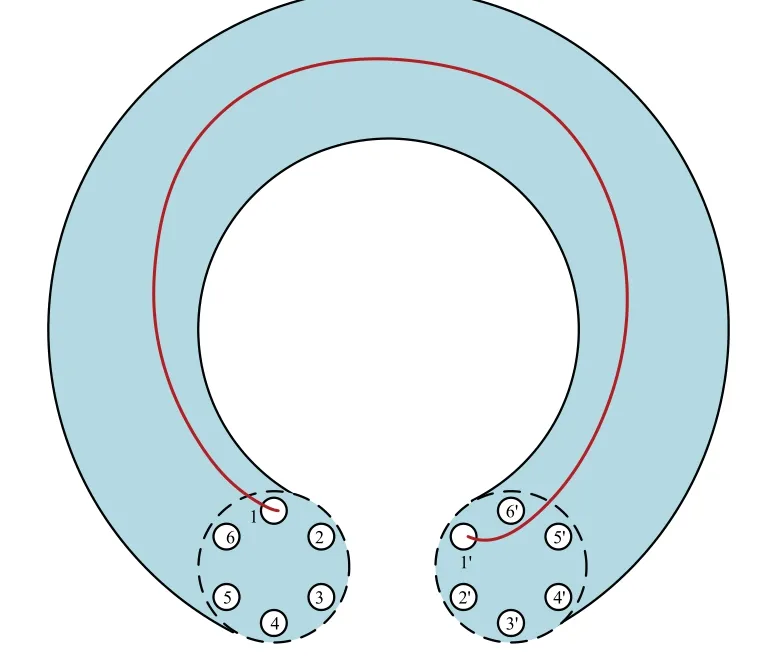
图3 六芯光纤环首尾相接处剖面示意图Fig.3 Schematic diagram of the cross-section of the end-to-end connection of the six-core fiber coil
目前,多芯光纤的熔接技术已经成熟,采用端面对轴技术可使对轴精度达到1°以内。如果在设计和制造六芯光纤的过程中增加一个标识点,可以分辨纤芯序号,由此可以实现闭合六芯光纤环的准确熔接和制造。
令耦合进入光纤环的两束光线为E1和E2,它们相向传输,然后按照顺时针和逆时针的顺序在纤芯中依次传输。所以两束光分别从光纤环的首端和尾端入射,令它们分别从1 和1′位置入射。它们传输的拓扑图如图4 所示。

图4 光纤环中光线传输拓扑图Fig.4 Optical transmission topology in fiber optic coil
由图4 可知,从首端1 号纤芯入射的光线E1传输一周后到达尾端1′位置,然后进入2 号纤芯传输。最终经过一个循环,回到首端1 号纤芯;同理,从尾端6′入射的光线E2传输一周后到达首端6 位置,然后进入尾端5′位置依次传输。最终在经过一个循环后,两束光相遇发生干涉。由两束光的传输规律可知,将纤芯序号统一为首端序号,光线E1按照1-2-3-4-5-6的顺序传输;光线E2按照6-5-4-3-2-1 的顺序传输,可见两束光在6 根纤芯中传输一周的过程中不发生干涉,仅在传输一周后发生干涉,所以干涉信号与杂散光信号可以被明显地区分开。
4 光束耦合方案设计
由六芯光纤环结构可知,六芯光纤使用1-6 号纤芯进行光线传输,且光纤环首尾相接,光被限制在光纤环中,需要在运行6 周后输出。为保证光线的输入输出,将Y 波导的光输入光纤环,在光纤环中绕行6周之后再返回至Y 波导。此时需要对光线进行耦合,而传统的耦合器无法实现这种方式。
由于本方案光纤环闭合,所以只能采用熔烧拉锥耦合器,采用倏逝场进行耦合。倏逝波是光线在纤芯发生全反射时进入包层的部分光波。当把光纤拉锥至数微米时,锥腰与波长达到同一数量级,则倏逝波场中大部分能量进入包层中。如果将两根光纤进行拉锥。则可以利用倏逝波将一根光纤中的信号耦合至另一根光纤中。
这种耦合器需要对光纤进行拉锥形成锥区,但是如果采用传统的拉锥工艺,会导致如图5 所示的六芯光纤纤芯的光场相互渗透,使得光线无法正常传输。

图5 传统拉锥工艺光场渗透示意图Fig.5 Schematic diagram of light field penetration in traditional taper drawing process
由图5 中红色虚线可知,当把六芯光纤和单模光纤拉锥至满足倏逝波耦合条件时,不但单模光纤的纤芯可以将光线耦合进六芯光纤的纤芯中,而且六芯光纤的6 个纤芯之间的光场也会相互影响,使得光线无法在光纤环中正常传输。
为了保证光线传输且不破坏六芯光纤内部光场结构,设计了轻拉锥工艺,使得光纤在拉锥过程中变形量不会太大。以此保证在光线耦合时,六芯光纤的其余6 个纤芯不受影响。
轻拉锥工艺是将单模光纤和六芯光纤包层对应的位置进行研磨,这样可以使得拉锥后的光场匹配,同时发生耦合。通过调整拉锥工艺,使光完全耦合,即光由耦合器完全耦合进入六芯光纤纤芯,在所有纤芯中传输一周后,光线再次完全耦合输出,从而使得在整个耦合过程中没有光路损耗。按此思想设计的耦合器结构如图6 所示。
由图6 可知,图中耦合器普通光纤和六芯光纤的包层都被研磨减薄,使得纤芯足够靠近六芯光纤的1号纤芯。然后对两者进行熔烧拉锥,从而可以使得入射光线从普通光纤纤芯完全耦合进六芯光纤的1 号纤芯,实现耦合器的功能。
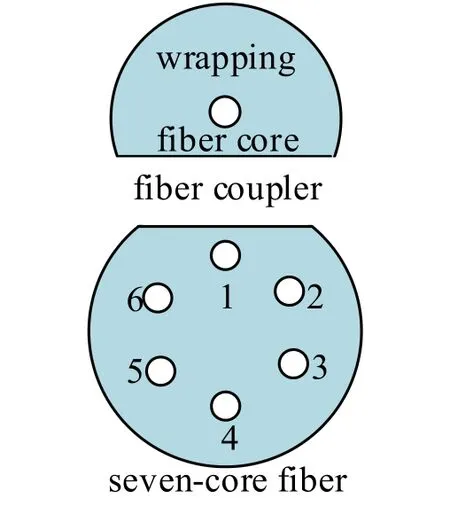
图6 光纤耦合器结构示意图Fig.6 Schematic diagram of fiber optic coupler structure
通过工艺分析可知,若对两光纤直接拉锥,则六芯光纤的所有纤芯都会存在光功率溢出;而对两光纤直接研磨则需要将光纤的研磨精度控制在1 μm 以内,难以实现。所以需要首先对两根光纤进行研磨,然后用拉锥控制耦合比,实现用于六芯光纤陀螺的耦合器制造。
对于拉锥型耦合器,只能采用侧面对轴技术。在研磨之前需要轴向定位,可以采用Ericsson PM995 保偏熔接机的POL 技术,可在光纤侧面找到对应的纤芯,角度的精度优于1°,由此可获取单模光纤和六芯光纤包层的准确对应位置进行研磨。
5 偏振扰动解决方案
光纤陀螺的偏振扰动是重要的噪声源,所以主要采用保偏光纤控制光线的偏振态。由于现有工艺无法将六芯光纤做成保偏光纤,为了解决存在的偏振串扰问题,可采用消偏技术,在Y 波导的两根输出尾纤以45°各熔接一段保偏光纤,即形成了里奥(Lyot)消偏器。
采用Lyot 消偏器可保证两个幅值相等的偏振光在光纤环中传输,避免了由偏振引起的光强起伏,可以达到与全保偏光纤陀螺方案相同的精度。Lyot 消偏器在六芯光纤陀螺中的结构如图7 所示。
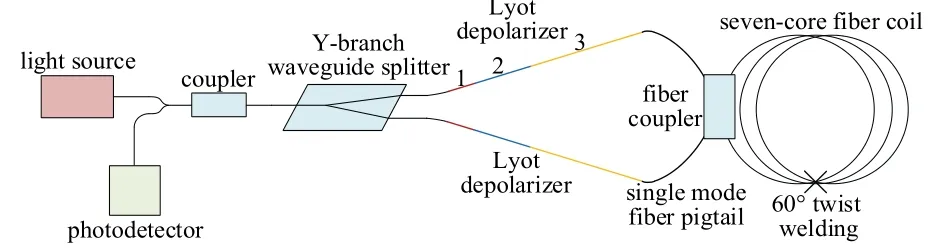
图7 六芯光纤陀螺中Lyot 消偏器结构示意图Fig.7 Structure diagram of Lyot depolarizer in six-core fiber optic gyroscope
由图7 可知,Lyot 消偏器被置于Y 波导之后,入射光线经过Y 波导分束后进入Lyot 消偏器(以1、2、3 保偏光纤组成的三段式Lyot 消偏器为例)消偏后将无偏光输入单模光纤,最终耦合进入六芯光纤环。
Lyot 消偏器保偏光纤间的长度关系遵循1:2:4…2N 的规律,它是利用保偏光纤两主轴存在的折射率差异引起的正交偏振光传输时间不同的原理,通过控制多段光纤的长度(传播长度),使其大于入射光线的相干长度实现消偏。所以,Lyot 消偏器可以通过控制保偏光纤的长度实现入射光线的偏振态控制,是偏振扰动的一种可行的解决方案。
6 结论
本文在光纤陀螺的结构和测量原理的基础上,对六芯光纤绕环的光纤检测精度进行了研究,并对消偏器选择和耦合器设计进行了分析,最终得到一种基于多芯光纤环的光纤陀螺结构。通过推导可知,对于0.001 °/h 光纤陀螺,采用六芯光纤环的光纤陀螺的测量精度为使用相同尺寸普通光纤环的干涉仪6 倍,所以光纤陀螺中使用多芯光纤环可以实现高精度光纤陀螺的小型化。
猜你喜欢
通信学报(2022年11期)2023-01-08
电工技术学报(2022年17期)2022-09-14
科教新报(2022年15期)2022-05-31
物理学报(2022年9期)2022-05-26
物理学报(2022年2期)2022-02-17
宁夏电力(2021年3期)2021-07-13
舰船科学技术(2021年5期)2021-07-03
移动通信(2020年12期)2020-12-23
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07