
局部工作空间有源降噪系统次级声源与误差传感器布放研究
2022-12-20 15:42王岩松
噪声与振动控制 2022年6期
李 飞,黄 双,王岩松,徐 洋
(1.上海工程技术大学 机械与汽车工程学院,上海 201620;2.东华大学 机械工程学院,上海 201620)
根据有关研究[1],纺织车间的平均噪声强度达到97.5 dB,而GB/T50087-2013《工业企业噪声控制设计规范》对生产车间的噪声有严格规定[2],最大噪声不得超过85 dB,纺织车间噪声严重超标,会导致工人出现头晕、耳聋等症状。有研究表明[3],纺织机械簇绒地毯织机噪声信号主要集中在0~500 Hz 的低频段,因此,必须采取有效的措施对纺织车间的低频噪声加以控制。
噪声的控制方法分为被动和主动控制。被动控制主要针对中、高频噪声,但对低频噪声的控制作用有限[4],无法对簇绒地毯织机的低频噪声进行有效的控制。主动控制主要针对低频噪声,且需要的设备体积小,十分适合应用于工况复杂的簇绒地毯织机。目前,国内关于簇绒地毯织机低频噪声主动控制的文章很少。如陈绍用等[5]采用滤波最小均方算法对簇绒地毯织机的噪声进行控制。但是,该论文中没有考虑次级声源以及误差传感器的位置和数量。而主动控制系统中次级声源以及误差传感器的位置和数量对控制效果有很大的影响[6],因此,次级声源以及误差传感器的布放和数量的优化研究显得十分重要。
目前的优化方法主要有基于梯度寻优的数值优化法[7]和优化搜索法[8]两种。数值优化法计算复杂,且对目标函数有极高的要求。优化搜索方法程序简单,概念清晰,对目标函数没有特殊的要求,因此本文选择优化搜索方法进行次级声源以及误差传感器的位置优化。优化搜索方法主要有遗传算法、灰狼优化器、粒子群算法、蚁狮算法等[9-12]。相较于其他优化搜索方法,蚁狮算法引入了轮盘赌以及蚂蚁的随机游走等,使其具有全局寻优性强、易于实现等优点。
本文以簇绒地毯织机的工作空间为研究对象,主要针对0~500 Hz 的低频噪声,以局部空间降噪量最大为目标函数,以次级声源以及误差传感器的空间坐标为优化变量,采用蚁狮算法对次级声源以及误差传感器的位置进行优化。
1 噪声信号采集
噪声信号采集对象为簇绒地毯织机,测试严格依照GB/T7111.1-2002 和GB/T7111.7-2002《纺织机械噪声测试规范》[13]的要求进行,测试时使用BK4961 传声器阵列,使用DHDAS 动态信号采集分析系统对簇绒地毯织机工作空间噪声信号进行采集。采样时间为10 s,采样频率为51 200 Hz,传感器监测点距离机器表面0.25 m,现场测试图如图1所示。
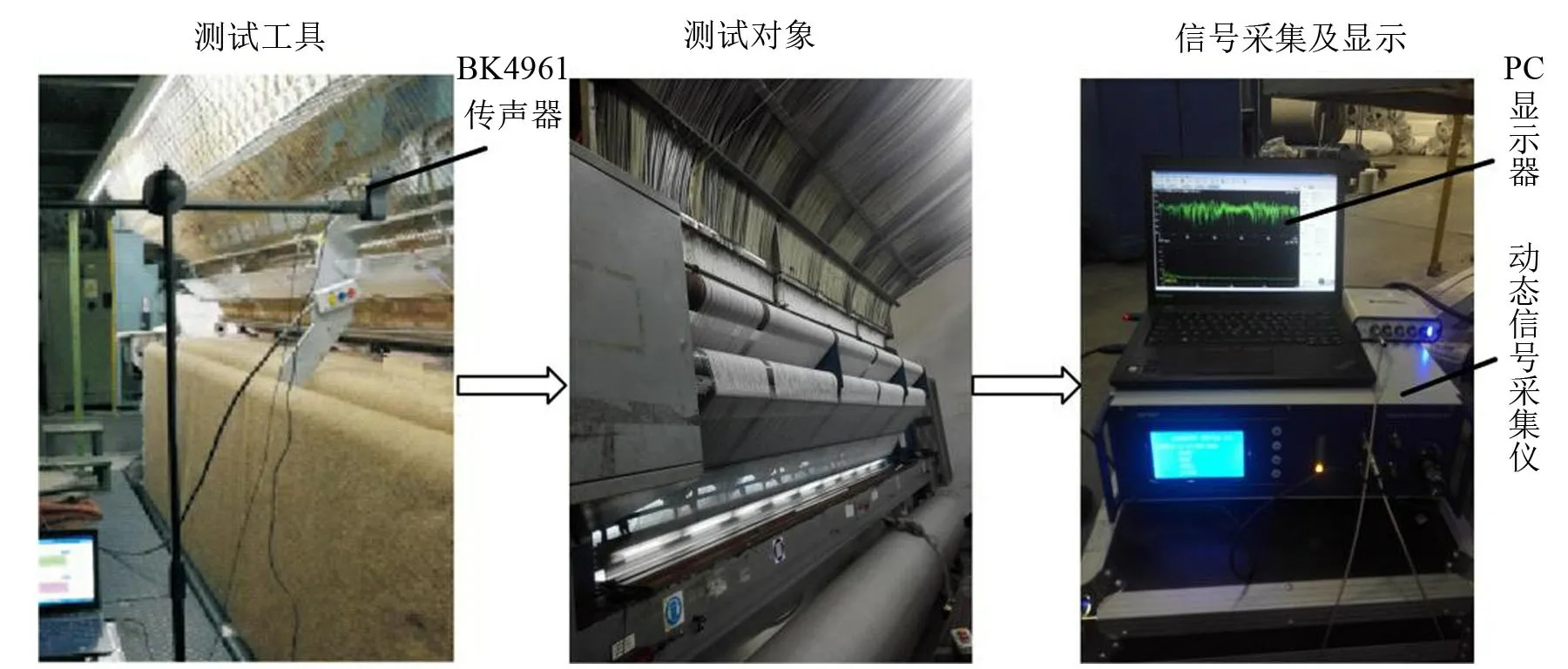
图1 现场测试图
为得到簇绒地毯织机正常工作时的噪声信号,选取5 s~6 s的噪声信号进行分析,经过傅里叶变换后得到信号频谱图如图2所示。
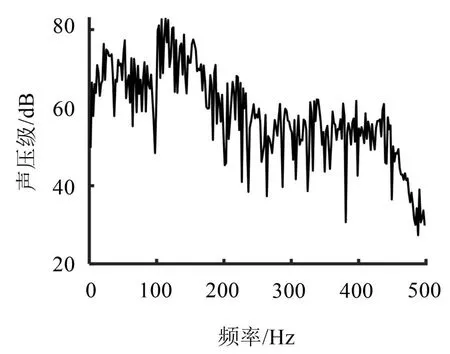
图2 信号频谱图
2 局部有源降噪布放优化模型
全空间的噪声控制需要布置大量的次级声源以及误差传感器,设计起来非常复杂,且簇绒地毯织机工作空间除工作台之外的区域并不会对工人造成影响,因此有必要引入局部噪声控制。局部噪声有源控制是指调整次级声源与误差传感器的位置,并将误差传感器位置限制在目标降噪区域内,实现小范围区域的噪声控制。次级声源与误差传感器的数量越多,系统的降噪性能越好,但是会导致系统变得复杂,难以控制,且由文献[14]可知,次级声源与误差传感器数量相同时,噪声控制效果更好。因此,本文选取两个误差传感器与两个次级声源进行布放研究。徐洋等[15]对低频噪声源进行了识别,发现针排机构是低频噪声源中占比最大的噪声源之一,本文主要针对这个噪声源进行控制,且赵锦艳[16]将簇绒地毯织机主要噪声源结构简化为点声源进行了工作空间声场分析,发现模拟点声源与实际结构辐射噪声在工作空间的分布相似。因此,使用点声源模拟簇绒地毯织机噪声是可行的。假设空间中存在一个初级声源,初级声源前方存在2个次级声源,次级声源前方存在2个误差传感器,布放示意图如图3所示。
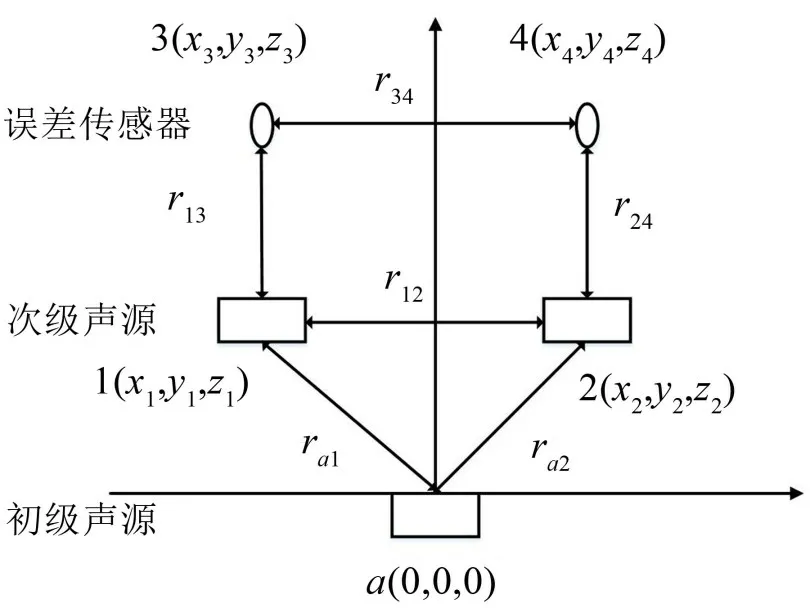
图3 次级声源与误差传感器布放示意图
设初级声源强度为qc,次级声源强度为qs,则误差传感器处的声压为:

其中:pc为初级声源在误差传感器3、4 处产生的声压,ps为次级声源1、2在误差传感器3、4处产生的声压,zc为初级声源a到误差传感器3、4处的传递函数矩阵,zs为次级声源1、2到误差传感器3、4处的传递函数矩阵。
根据所有误差传感器处的声压值平方和最小的消声准则,选取误差传感器处声压值的平方和J作为目标函数:

其中:H表示共轭转置,不断调整次级声源与误差传感器的位置能够使目标函数取得最小值,系统稳定时得到最优次级声源强度为[17]:

如果次级声源数目和误差传感器的数目相等,zs可以是非奇异矩阵,则最优次级声源强度可以简化为:

初级声源单独作用产生的辐射功率为:

次级声源单独作用产生的辐射功率为:

初级声源与次级声源互相作用产生的辐射功率为:

空间中总的辐射声功率为:

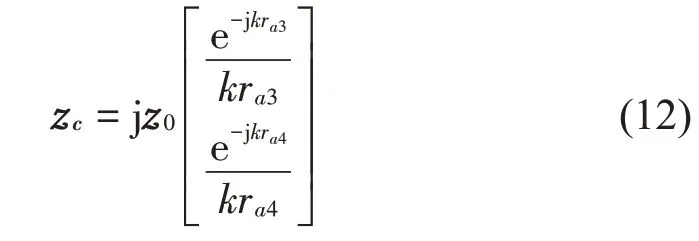
其中:zc(xc)是初级声源的传递函数矩阵,zs(xs)是次级声源的传递函数矩阵,zc(xs)为初级声源与次级声源的传递函数矩阵。
空间内点声源在某一位置xe的传递函数矩阵为:
其中:z0为点声源的辐射阻抗,其值为z0=,k为波数,其值为k=。
所以次级声源的传递函数矩阵为:
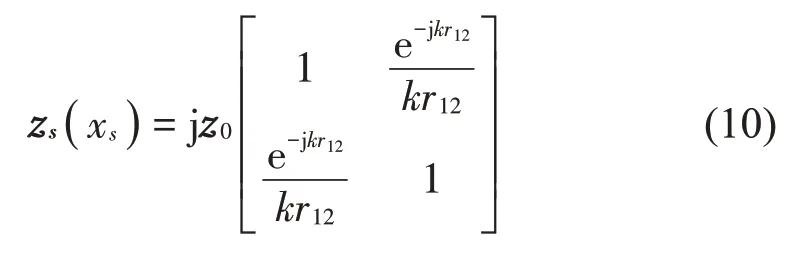
初级声源到次级声源的传递函数矩阵为:
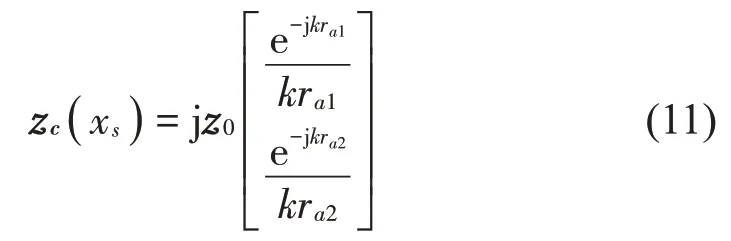
由互易定理知:zc(xs)=zcT(xs)
初级声源到误差传感器处的传递函数矩阵为:
次级声源到误差传感器处的传递函数矩阵为:
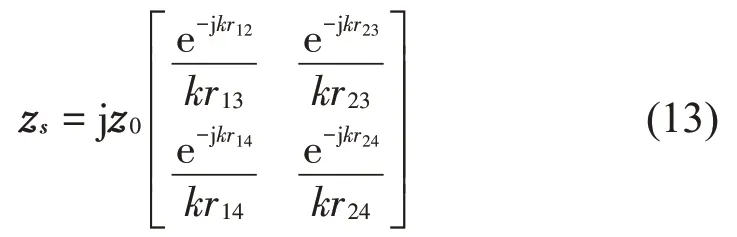
其中:r12为次级声源1、2 间的距离,r13、r14为次级声源1 与2 和误差传感器3、4 间的距离,r23、r24分别为次级声源分别与误差传感器3、4间的距离,ra1、ra2为初级声源a与次级声源1、2 间的距离,ra3、ra4为初级声源a与误差传感器3、4间的距离,r34为误差传感器3、4间的距离。
由上述推导可得系统降噪量为:

设初级声源a的坐标为(0,0,0),次级声源1、2的坐标分别为(x1,y1,z1)、(x2,y2,z2),误差传感器3、4的坐标分别为(x3,y3,z3)、(x4,y4,z4)。将坐标分别代入式(14)中可得位置优化的目标函数,且易知AL是关于次级声源以及误差传感器位置的函数。对次级声源以及误差传感器位置进行合理布放能够得到最大的局部降噪量。
3 蚁狮优化算法
蚁狮算法将蚁狮狩猎蚂蚁的机制用于参数的优化,将每一次迭代中适应度最优的个体设置为精英,通过算法的不断迭代,精英的位置即为最优解。蚁狮算法的工作流程见图4。
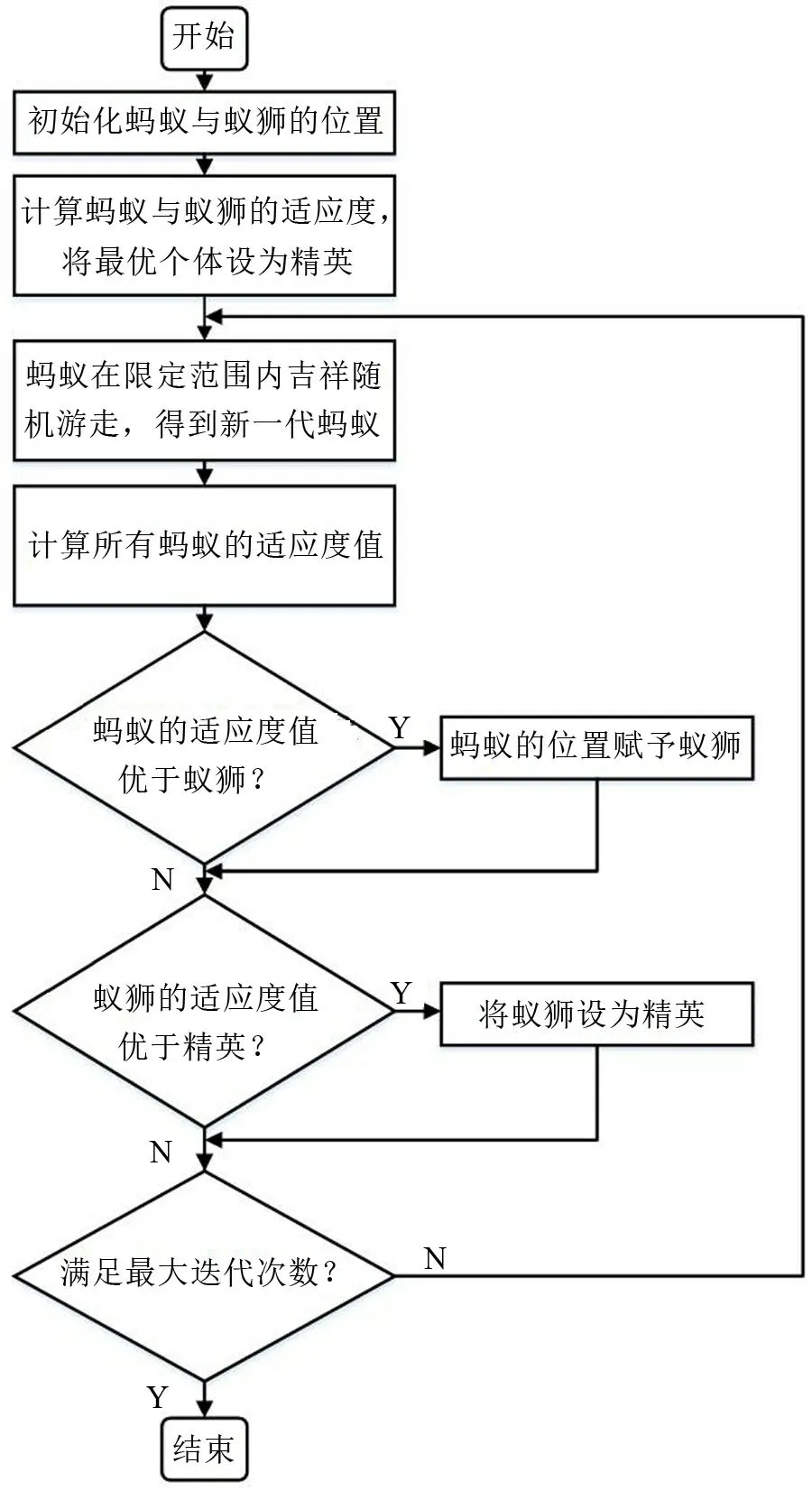
图4 蚁狮算法流程图
蚁狮算法的具体步骤为:
(1)设置算法的参数,包括最大迭代次数、蚂蚁数量、优化参数的数量及上下限等。
(2)初始化所有蚂蚁与蚁狮的位置,然后计算其适应度值,并将最优个体设置为精英。
(3)蚂蚁进行随机游走。利用轮盘赌给每只蚂蚁匹配一只蚁狮,利用式(15)、式(16)对蚂蚁的游走范围进行更新,然后让蚂蚁根据式(17)围绕蚁狮进行随机游走,取平均值作为下一代蚂蚁的初始位置。
式(15)、式(16)中n为当前迭代次数,cn、dn分别为第n次迭代的下界与上界,I是一个比率,其值通过式(18)得到。

式中:N是最大迭代次数,α是基于当前迭代的一个常数,能够调整优化算法的精度,其取值见式(19)。
式(17)中X(n)是第n次迭代时蚂蚁的位置,nmax是最大迭代次数,cumsum是蚂蚁在每次迭代中位置的累加和,r(n)是随机函数,定义如式(20)所示。

(4)计算蚂蚁的适应度值并与蚁狮的适应度值进行比较,如果蚂蚁的适应度值高于蚁狮,则蚁狮被蚂蚁替换。
(5)对蚁狮与精英的适应度值进行比较,如果蚁狮的适应度值高于精英,则将该蚁狮设为精英。
(6)判断迭代次数是否满足终止条件,如果满足,输出近似最优解,如果不满足,重复步骤(3)~步骤(5)。
4 参数优化及仿真分析
4.1 设定优化目标及变量
为了进行有效降噪,设定优化目标为局部空间降噪量最大,即目标函数为:

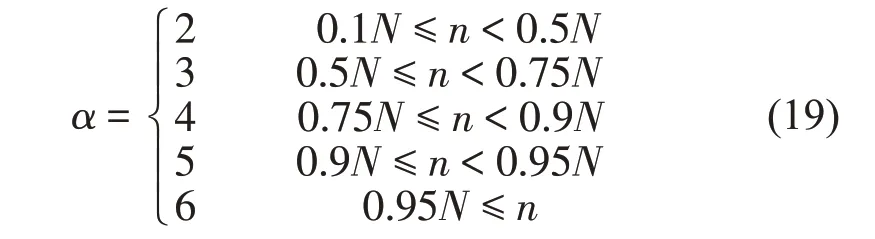
因此,选取次级声源以及误差传感器的位置参数x1、x2、x3、x4、y1、y2、y3、y4、z1、z2、z3、z4作为优化变量。降噪空间布放位置如图5 所示,长4 m、宽3 m、高3 m 的封闭房间内放置一台簇绒地毯织机,a为点声源,1、2为次级声源,3、4为误差传感器,次级声源布置在点声源与降噪区域之间,误差传感器布置在降噪区域内,则位置参数的限定范围如表1所示。
图5 降噪空间布放位置示意图
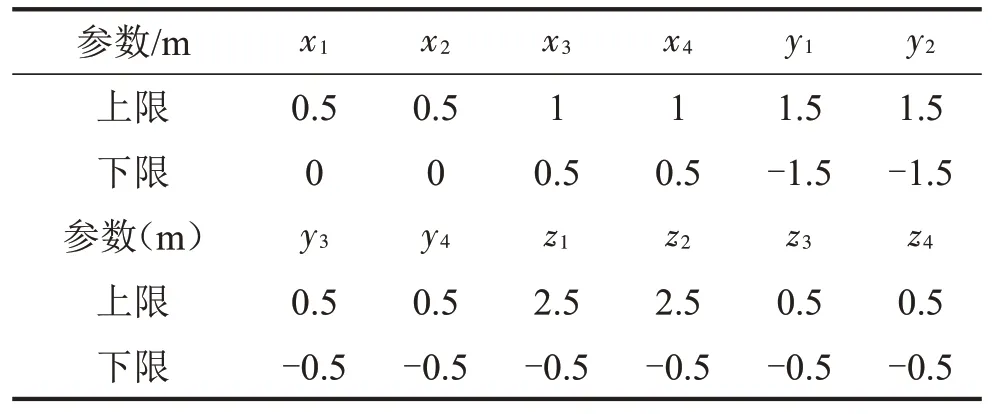
表1 优化参数范围
4.2 单频仿真分析
由于实测簇绒地毯织机噪声比较复杂,所以先采用单频信号验证蚁狮算法是否适用于次级声源与误差传感器的位置寻优。设置初级声源为声强度等于1、频率分别等于100 Hz、200 Hz、300 Hz的单频信号。设蚁狮算法的迭代次数为1 000,蚂蚁的个数为20,运行程序后,得到目标区域的降噪量。图6为w=100 Hz、200 Hz、300 Hz时降噪量随迭代次数变化的曲线,并通过蚁狮算法得到了次级声源以及误差传感器的位置。取w=100 Hz 时优化得到的次级声源以及误差传感器位置参数,保证两次级声源的距离、次级声源与误差传感器的距离不变,即r12=1.72 m,r13=1.64 m,r14=1.8 m,r23=0.73m,r24=0.74 m,目标区域降噪量随初、次级声源距离的变化曲线见图7。图8 为目标区域降噪量随初级声源与误差传感器距离的变化曲线。
从图6 可以看出,采用蚁狮算法,在3 个频率处都取得了很好的降噪效果,降噪量分别为9.91 dB、12.35 dB、11.99 dB。图中降噪量初始存在负值,这是由于在算法运行之初,蚂蚁的位置被随机分配,这也说明了次级声源以及误差传感器布放的位置不合理可能使控制后的噪声进一步增强。
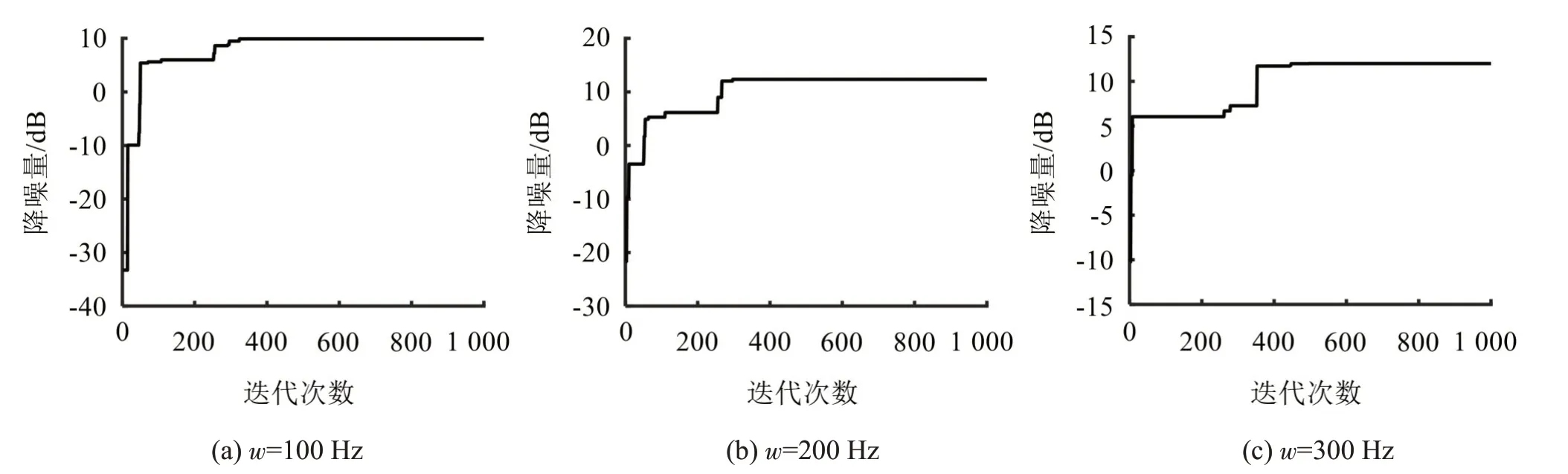
图6 w=100 Hz、200 Hz、300 Hz时降噪量随迭代次数变化的曲线图
图7中,ra1、ra2分别为初级声源a到次级声源1、2之间的距离,通过比较可以发现降噪量的峰值都出现在ra1、ra2大于0.8 m的区域内。因此在进行次级声源布放时,应使初、次级声源之间的距离适当远一些。图中的负值最多不超过-5 dB,这说明当误差传感器的位置确定以后,次级声源位置的变化并不会对降噪效果产生较大的负面影响。
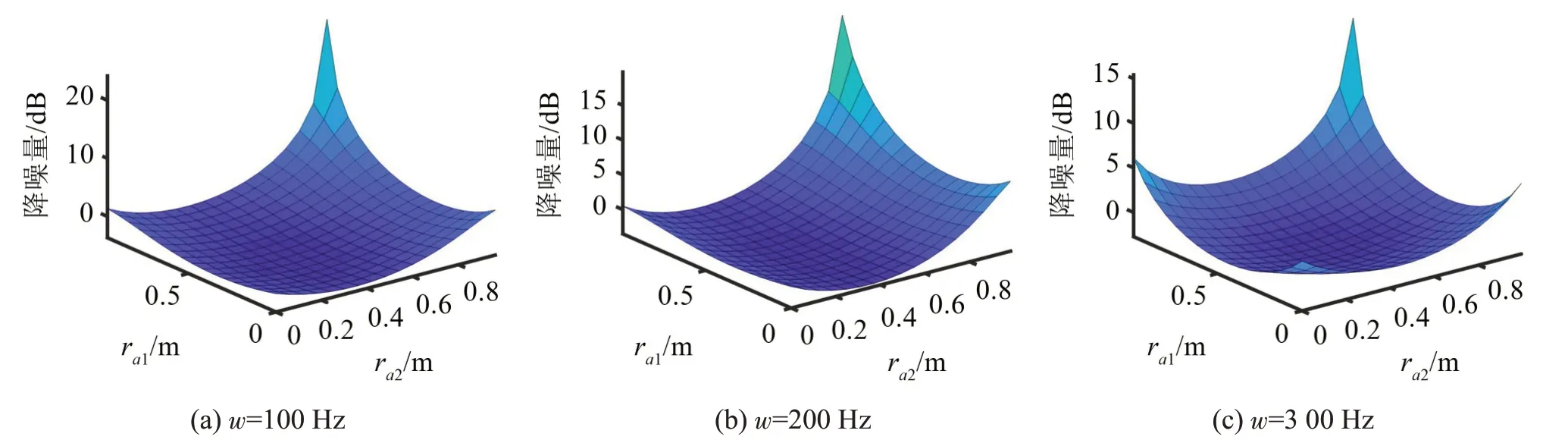
图7 w=100 Hz、200 Hz、300 Hz时初、次级声源距离与降噪量关系图
图8 中,ra3、ra4分别为初级声源a到误差传感器3、4 之间的距离,图中大部分区域的降噪量都是负值,说明误差传感器的布放对系统的降噪量有极大的影响,降噪量的峰值都出现在ra3大于0.8 m 的区域内,因此在布放误差传感器时,要尽量使初级声源到两个误差传感器的距离相等,且ra3要适当大一些。
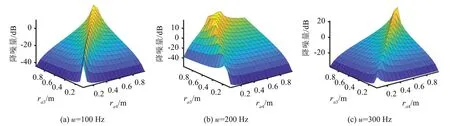
图8 w=100 Hz、200 Hz、300 Hz时初级声源与误差传感器间的距离和降噪量关系图
4.3 实际噪声仿真分析
针对实测噪声进行次级声源以及误差传感器布放优化,优化目标设为0~500 Hz 内系统平均降噪量最大,即目标函数为:
其中:AL(w)为频率为w时的降噪量,m为取的频率点数。
设蚁狮算法的迭代次数为5 000,蚂蚁的个数为20,运行程序后,得到系统在0~500 Hz 内平均降噪量最大为3.17 dB,平均降噪量随迭代次数变化的曲线图见图9,优化后的参数见表2。
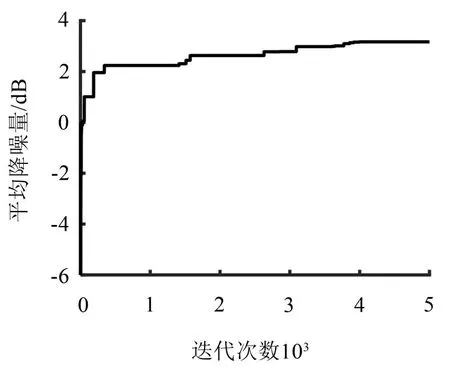
图9 平均降噪量随迭代次数变化的曲线图
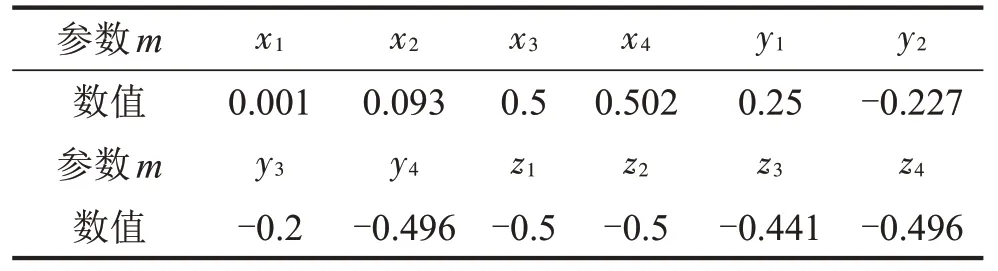
表2 优化后参数值
将优化后的参数是代入降噪量公式AL中,得出该布放方案在0~500 Hz 的频段上各频率的降噪量,如图10 所示。从图中可以看出,该布放方案对某些频率处噪声有非常好的抑制效果。在146Hz处,降噪量最高,其值为26.9 dB,在0~500 Hz整个频段上的平均降噪量达3.17 dB,说明经优化得到的布放方案能够很好抑制簇绒地毯织机工作空间的低频噪声。
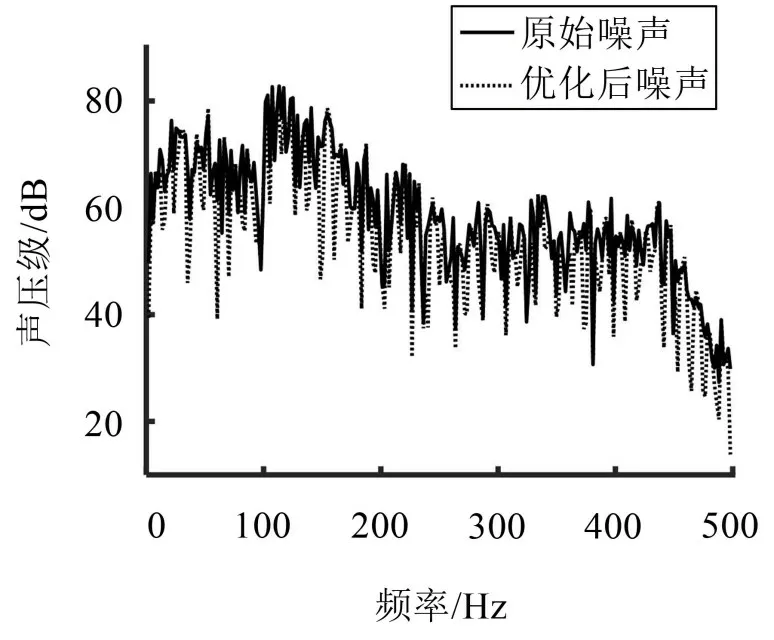
图10 频域降噪效果图
5 结语
为了实现簇绒地毯织机工作空间低频噪声的控制,本文将局部空间降噪量作为控制目标,采用蚁狮算法得到了次级声源以及误差传感器的最优布放位置。针对单频仿真,采用蚁狮算法,在w=100 Hz、200 Hz、300 Hz时得到的布放方案,分别取得了9.91 dB、12.35、11.99 dB 的降噪量。针对实测噪声进行仿真分析,发现在0~500 Hz 的频段上平均有3.17 dB的降噪量,说明该布放方案具有合理性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
晚晴(2022年2期)2022-06-01
电子制作(2019年23期)2019-02-23
中国纺织(2018年11期)2018-12-13
国际木业(2018年3期)2018-09-10
少儿科学周刊·儿童版(2017年5期)2017-06-29
学苑创造·A版(2017年3期)2017-04-27
噪声与振动控制(2016年5期)2016-11-09
现代工业经济和信息化(2016年12期)2016-05-17
舰船科学技术(2015年8期)2015-02-27
