
应用指向性声源进行有源降噪的声场特性研究
2022-12-20 15:42白宇田李佳勇
噪声与振动控制 2022年6期
唐 俊,白宇田,汪 照,李佳勇
(1.天津大学 建筑工程学院,天津 300072;2.天津大学 港口与海洋工程天津市重点实验室,天津 300350)
有源噪声控制是根据德国发明家Leug 在1933年提出的有源消噪(Active Noise Cancellation)思想发展而来的[1-2]。相比于传统的被动降噪方式,有源噪声控制在中低频段有更好的噪声控制效果,并且其装置体积小、质量轻,能在多种环境下使用[3]。然而这种控制方式存在一定局限性,在进行控制时,如果次级声源和初级声源的轴线不在同一条直线上,难以实现空间中全部位置降噪[4]。根据能量守恒,自外部引入了一个次级声源,输入功率必将增加系统总能量,即空间内的声能量总量是增加的。控制区域内的噪声量降低势必会引起其他区域的声能量增加,即控制区域内达到了降噪的效果,而其他的区域会起到增噪的效果[5-7]。传统有源噪声控制采用的次级声源大多是无指向性声源,这种声源在空间内不同位置产生的声信号大致相同,主要是靠局部声音的互相干涉作用进行降噪,因此通常只能在一定的范围内降噪,存在降噪范围较小,而且其他区域噪声可能会因干涉叠加,噪声反而会增大的问题[8-10]。在控制方向发生变化时,控制效果会随着控制角度的增大而变差[11-13]。在多个位置布放次级声源和传感器能够较好地解决这一问题[14-15],但有源降噪控制系统则由简单的SISO 系统(Single Input Single Output,单进单出)变为MIMO 系统(Multiple Input Multiple Out,多进多出),在增加运算量的同时增加了系统的复杂性[16]。在空间中次级声源和传感器的布置在很大程度上决定了最终的控制效果[17];采用这种方法噪声控制区域范围虽然增大,但位置依然固定,不能满足时变和空变环境的降噪要求[18-19]。
针对以上问题,本文使用具有指向性的相控阵平面扬声器阵列作为次级声源进行有源噪声控制,所采用SISO系统结构简单,运算量小。使用相控阵方法进行波束偏转改变阵列声源的空间指向性,使其能在空间中灵活地对不同位置进行高效的噪声控制,可应用于较大空间内的跟随式有源降噪,如大型变压器周围对工人的跟随式降噪和有源降噪头枕等。采用有限元分析控制前后的声场,研究单扬声器和扬声器阵列次级声源对空间声场的影响,并设计实验进行测试,验证了相控扬声器阵列次级声源在空间有源降噪中的优越性。
1 基于FxLMS的前馈有源噪声系统
由于FxLMS 算法实现简单且运算量小[20],本文使用FxLMS算法式构建如图1所示的前馈式有源噪声控制系统,通过仿真与实验结果对比研究有源噪声控制后的空间声场特性。
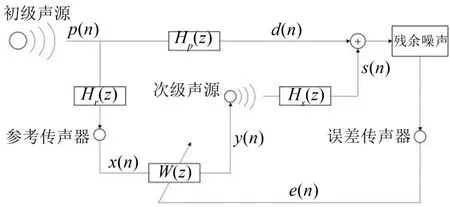
图1 前馈FxLMS有源噪声控制系统
图中W(z)为FIR 滤波器,其长度为L,第n时刻的系数和输入分别为:

hr(n)、hp(n)和hs(n)分别是参考通道Hr(z)、初级通道Hp(z)和次级通道Hs(z)的脉冲响应,各通道对应的响应为参考信号x(n)、期望信号d(n)和抵消信号s(n)。
其中:“*”表示卷积计算,p(n)是初级声源产生的初级信号,y(n)是经过滤波器输出的次级信号,由参考信号x(n)计算得到,即:

设定在长度为L个采样点内滤波器的系数是稳定不变的,将式(6)代入式(5)中整理得:

式中:r(n)为滤波-x信号矢量,也通过参考信号得到:

误差传声器处接收到的信号e(n)为:

根据最小均方误差准则,控制系统的目标函数为:

根据最陡下降法的原理对滤波器系数进行更新,即:

式中:μ为收敛系数,决定了系统的稳定性和收敛速度。
2 有源噪声控制的声场仿真分析
有源噪声控制是有目的地使用次级声源去控制原有噪声,由于声场内部声能量增加,引入次级声源势必会对声场造成干扰。通过定性地对有源噪声控制的声场分析,有助于优化控制系统,降低其对噪声控制区以外区域的不良影响。
2.1 单次级声源干涉声场
有源噪声控制多用于低中频噪声,这类噪声波长较长,当声源的大小尺寸较小时,可简化为点声源,单通道有源噪声控制通常使用无指向性的声源进行控制。自由场中忽略点声源的反射波,空间中一点声压p为:

其中:A一般为复数,与点声源和介质有关,A/r的绝对值为声压振幅,r为该点到声源的距离,ω为声波频率,k=ω/c0为波数,c0是介质中的声速。
单通道有源噪声控制是引入一个次级点声源去控制一个初级点声源产生的噪声,双声源空间声场叠加如图2 所示。由式(12)求得初级声源在空间中某点的声压:
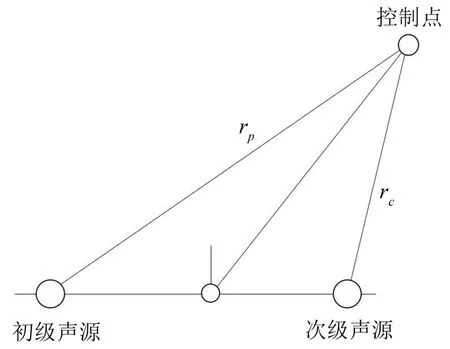
图2 双声源空间声场叠加示意图
其中:qp为初级声源的强度,rp为初级声源到该点的距离。
次级声源在该点产生的声压可写为:

其中:qc为次级声源的强度,rc为次级声源到该点的距离。
空气中声波发生线性干涉,初级声源和次级声源的声压可在该点线性叠加为:

系统的控制目标为控制点处有最小声压,等价于其平方最小,即:
式中:
对式(16)两边求导,当实部和虚部同时为0 时,即当:
求得最佳次级声源强度为:

由式(17)可以看出,进行控制的次级声源强度大小与距离(rc/rp)有关。次级声源与初级声源在该点的声压相位差为180°时,即在控制点发生了相消干涉。由于次级声源也是一个点声源,各个方向声辐射相同,在空间中某些位置产生相消干涉时,在其他某些位置会产生相长干涉,导致一些区域声压变大。
为分析有源噪声控制系统的声场特性,在自由场中选择尺寸为3 m×3 m×3 m的正方体空间进行分析,介质为空气,介质密度ρ0=1.204 1 kg/m3,声速c0=343.24 m/s。对正方体空间进行网格划分,划分后的每个网格节点处声压表示划分后每个单元的平均声压。以空间中心作为原点建立坐标系,初级声源是一直径0.1 m 的无指向性圆形扬声器,圆心坐标为(1.5,0,0)m,在空间中设置与初级声源相同的无指向性圆形扬声器作为次级声源,圆心坐标为(0,0,1.5)m,如图3所示。
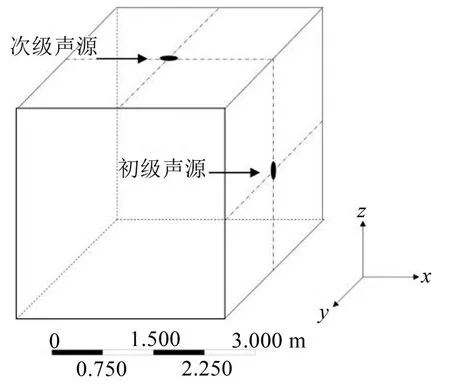
图3 声源在空间的设置图
初级声源频率为f=300 Hz,声压级为109.2 dB。控制前声场分布如图4(a)所示,原点处声压级为75.6 dB,平均声压级为72.7 dB。选取坐标原点为噪声控制点,根据式(17)可求得次级声源的最优强度,对噪声控制点进行有源降噪。实施控制后,原点处声压级降至64.6 dB,降噪量为11.0 dB,控制后的声压级分布如图4(b)所示。
根据式(17),初级声源、次级声源到控制点的距离相同时,声源强度也相同,次级声源的声压级也为109.2 dB。由于声源和空间的对称性,由初级声源和次级声源产生的声场呈对称分布,在空间对角线处出现了一条声压级较低的“静音带”,空间声场以这条“静音带”为轴线对称。由于增加了额外的次级声源,空间内的总能量增加,控制后空间内的平均声压级由72.7 dB上升至79.2 dB,增加了6.5 dB。从图4(b)能直观地发现,包括控制点在内的一部分区域,声压级是有所降低的,但更多的非噪声控制区域由于相长干涉的作用,声压级明显增大。与控制前的声场相比,控制后的空间声场变得无规律,如图4(b)中次级声源附近的区域①的声压级上升了12.6 dB,区域②声压级上升了5.1 dB;除控制点外也有部分区域的声压级由于相消干涉而降低,如区域③的声压级降低了4.7 dB。
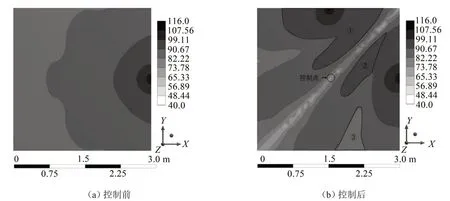
图4 单扬声器次级声源降噪前后的空间声压级分布
2.2 阵列次级声源干涉声场
为减少引入次级声源而造成的其他区域的噪声增大问题,可以使用指向性声源替代无指向性声源进行有源降噪。将点声源按照一定的空间顺序排列为声源阵列,根据线性叠加原理,组建的阵列声源具有一定的指向性[21],能够作为指向性次级声源进行有源噪声控制。由于阵列声源的指向性,声源辐射的声能量主要集中在其指向性波束区域,故采用阵列声源作为次级声源时,其对非控制区域声场的影响会更小。
使用阵列次级声源进行有源噪声控制时,在空间中控制位置处,具有n个阵元的阵列声源在该点的声压为:
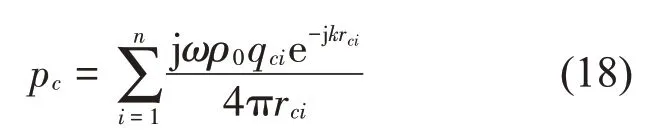
初级声源和扬声器阵列声源的声压在该点的线性叠加和为:

同样选定控制点处声压最小为控制系统目标函数,当取得最好的控制效果时,控制点声压的平方取到最小。
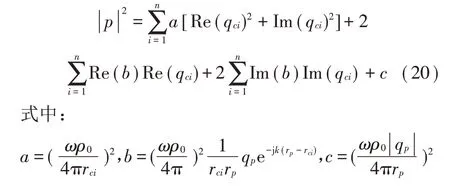
对式(20)的实部和虚部求导,可得到扬声器阵列的强度矢量。将图4(b)所示的次级声源替换为扬声器阵列声源。该声源为如图5所示的九元正方形扬声器阵列,阵元为与初级声源相同的圆形扬声器,阵元间距为0.2 m,阵列中心坐标为(0,0,1.5)m。
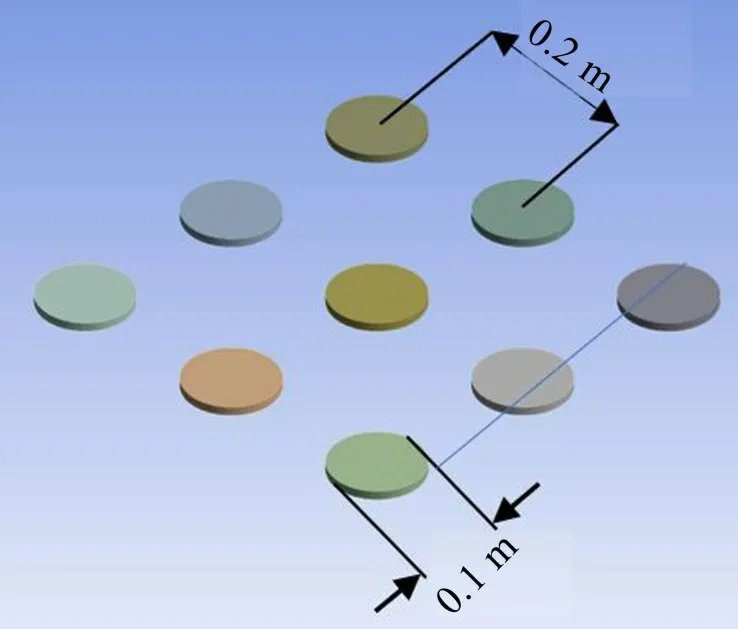
图5 九元正方形扬声器阵列
初级声源的参数与位置与2.1节中相同,选取坐标原点为噪声控制点,使用指向性声源作为次级声源进行有源降噪后的声压级分布结果如图6(b)所示。与如图6(a)所示的单扬声器次级声源控制声场相比,噪声控制区以外区域的噪声额外增加的情况显著减少。
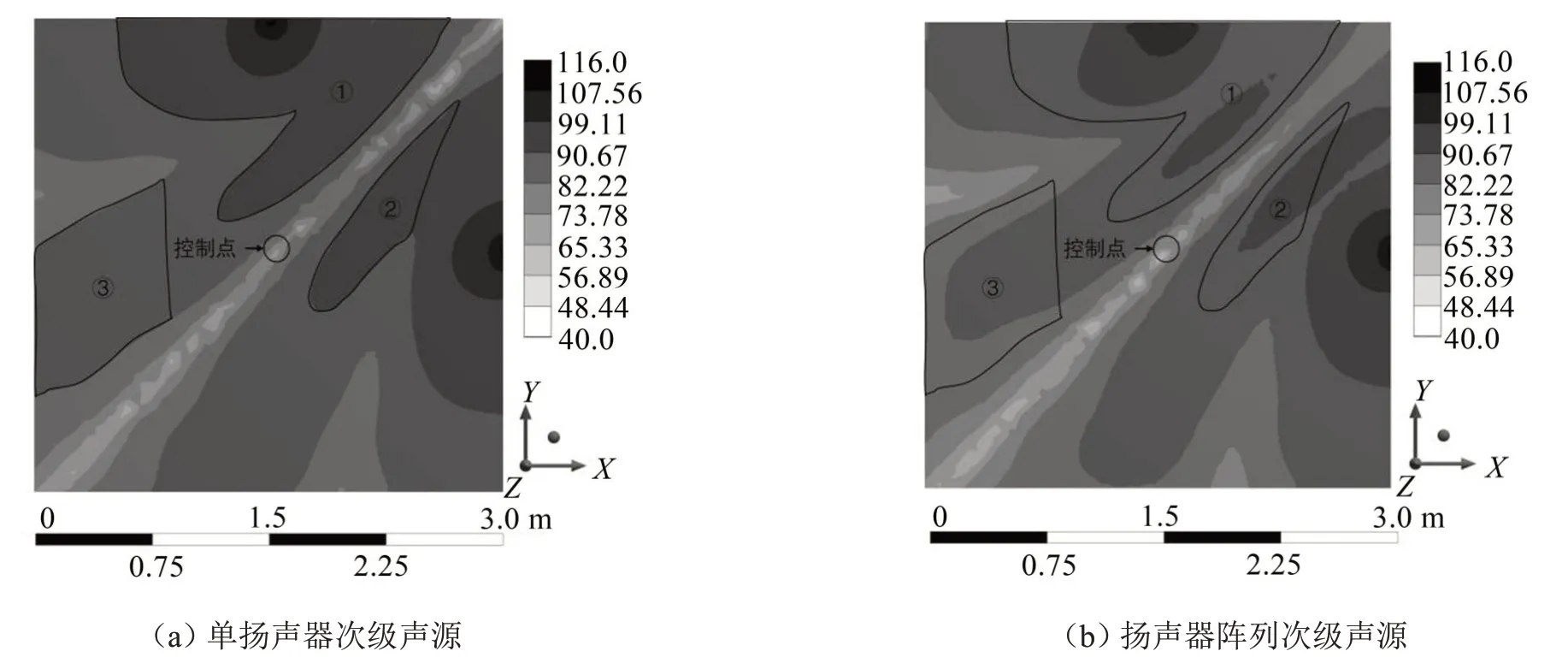
图6 不同次级声源控制后的空间声压级分布
将扬声器阵列作为次级声源对控制点降噪,当其声压级衰减到64.6 dB,降噪量为11.0 dB 时,指向性次级声源的声压级为94.4 dB。达到相同降噪量的单扬声器次级声源的声压级为109.2 dB,与之相比,指向性次级声源的声压级降低了14.8 dB。控制后空间内平均声压级由72.7 dB 上升至75.6 dB,仅增加2.9 dB。与单扬声器次级声源相比,控制后空间内平均声压级的增量降低了3.6 dB,表明采用扬声器阵列作为次级声源,在达到相同降噪效果时,控制系统引入的声能量更少,对声场的不良影响更小。
继续增加指向性次级声源的输入能量,当声压级增加到96.1 dB时,达到扬声器阵列次级声源的最优强度。此时控制点的声压级降至56.7 dB,降噪量为18.9 dB,空间内平均声压级为76.8 dB,控制前后仅增加4.1 dB。表1 给出了当单扬声器次级声源和扬声器阵列次级声源达到最优强度时,空间中各个区域的声压级数值比较。
分析图6 中不同区域声压级数值可以看出,由于扬声器阵列次级声源的辐射声能量更为集中,因此声压级比单扬声器低13.1 dB,降噪量却提高了7.9 dB,起到了更好的效果。
对比表1中进行有源降噪后空间中各个区域的声压级可以明显看出,扬声器阵列次级声源引入声能量较低且更集中,对空间声场的不良影响更小。在高降噪量的前提下,次级声源的近场区域①的平均声压级低7.5 dB,初级声源的近场区域②的平均声压级低3.4 dB。距离声源较远的区域③和区域④平均声压级升高量分别减少了1.6 dB和3.0 dB。

表1 降噪后空间各区域声压级/dB
2.3 相控阵列指向性声源干涉声场
采用相控阵的方式改变图6 中每个阵元的初相,可以使阵元间产生步进相位,就能够使阵列的指向性发生偏转[22]。改变同一列每个阵元的相位,使每个阵元产生的声波能够同时到达传播途径中的一个面——波阵面[23],从这个平面开始,所有声波都会同相继续传播,即可实现虚拟波阵面的偏转。使用相控阵列作为次级声源,可以在不改变位置的情况下,实现空间中指定区域的有源降噪。如图7所示,当偏转角为θ,阵元间的波程差Δl与间距d的关系为:
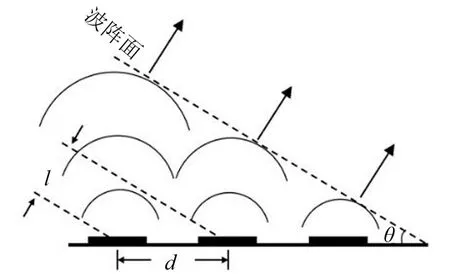
图7 波阵面偏转示意图

相邻阵元的相位差Δφ为:

式中:λ为该频率下所对应的波长。
利用相控阵方法使阵列次级声源的指向性偏转,能够在更大的区域内实现有源噪声控制。在空间中分别选取控制点A和B,坐标分别为(-0.866 m,0.0 m,0.0 m)和B(-1.35 m,0.15 m,0.0 m)。控制点A、B 与扬声器阵列中心连线的夹角分别为30°和45°。分别调整相控阵列的偏转方向,即可对空间中处于不同方向的指定控制点进行有源降噪,控制后的声压级图如图8所示。
当控制方向改变时,有源降噪系统形成的静音带也会跟随控制方向偏转。调整相控阵列的波束使之偏转30°,对如图8(a)中所示的控制点A进行有源降噪后,A 处的声压级由72.9 dB 降至56.7 dB,降噪量达16.2 dB。当控制点由A 点变更为如图8(b)所示的B点时,只需调整相控阵列的波束使之偏转45°即可。实施有源降噪后,B处的声压级由70.5 dB降至55.8 dB,降噪量达14.7 dB。采用扬声器阵列作为次级声源能够在较大的范围内进行有源噪声控制,能够对控制的区域和方向进行更灵活的调整。
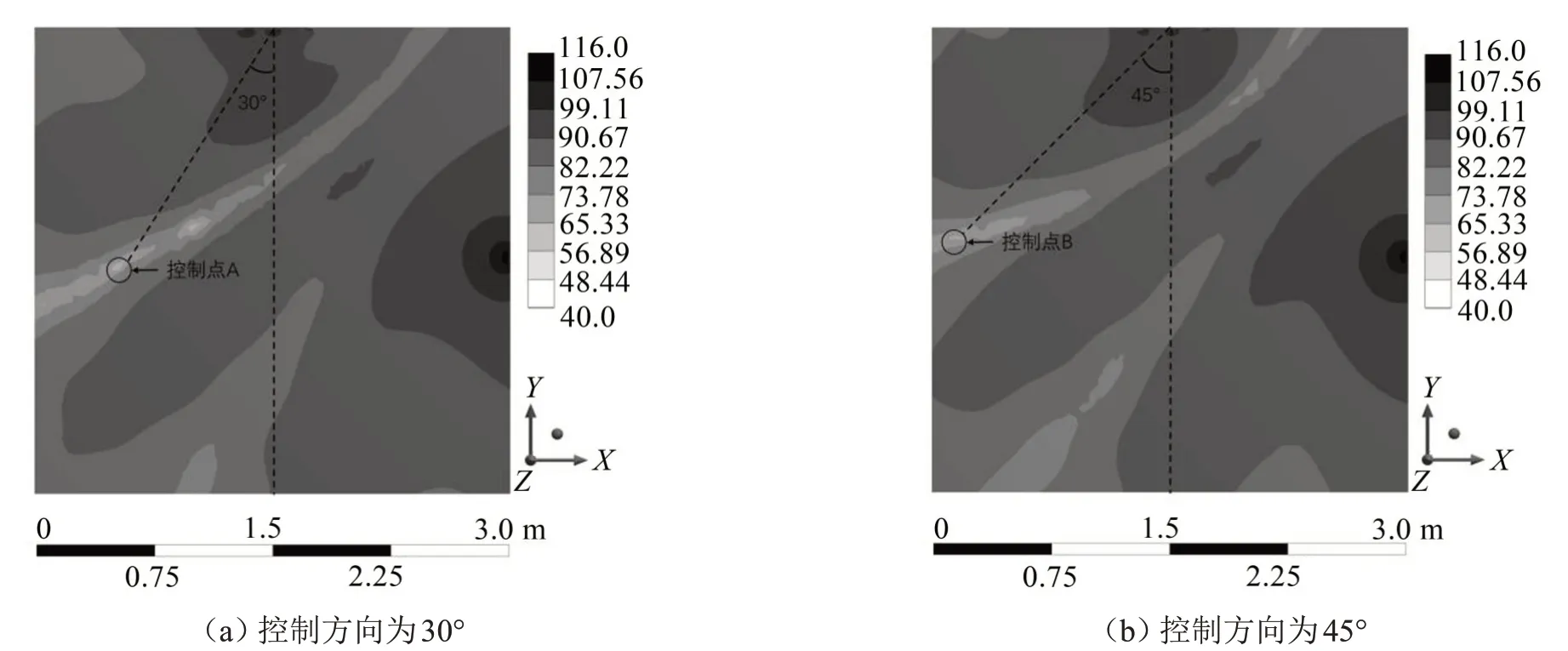
图8 不同方向指定位置降噪后声压级分布
2.4 仿真结果分析
对采用单扬声器次级声源和阵列次级声源进行主动控制前后的声场仿真,结果很直观地表明,在进行有源噪声控制时,由于引入了额外的次级声源,会使得空间声场变得无规律。噪声控制区域声压级降低,而其他区域的声压级会不同程度升高。
由于扬声器阵列次级声源具有一定的指向性,辐射声能量主要集中在主瓣波束区域,在噪声控制点产生相同的降噪量时,扬声器阵列次级声源不需要有特别高的强度,次级声源附近的声场增大量显著减小。虽然由于次级声源的存在,不可避免地对声场其他区域会造成一定的影响,但与单扬声器次级声源相比,扬声器阵列次级声源的影响更小,控制后空间内平均声压级增量更低。并且达到最优强度后,扬声器阵列次级声源的降噪量明显大于单扬声器次级声源。
总体而言采用扬声器阵列作为次级声源进行有源噪声控制时,所需的声源级更小,降噪量更大,能够获得更好的控制效果,对其他区域的影响更小。采用相控阵技术使扬声器阵列的指向性发生偏转,结合有源噪声控制系统可以实现对空间中不同位置进行定向降噪。这种降噪方式极大地扩展了降噪系统应用的灵活性,当噪声场中受保护区域位置发生改变时,通过调控相控阵列主瓣方向可实现跟随式降噪。
3 有源噪声控制实验与分析
3.1 实验系统
为了进一步验证指向性阵列次级声源的效果,并评估其对环境声场的影响,在半自由场消声室中搭建实验系统,开展应用指向性声源的有源降噪实验研究。实验所用次级声源阵列由16 个校准过幅值和初相位的扬声器和其配套功放构成,阵列固定在一块刚性板上,阵元间距为20 cm,背面使用20 cm厚聚氨酯吸声材料填充,减小其背侧地面的声反射。将次级声源放置在地面上,初级声源放置在位于距阵列中心2 m、高度1 m 处,给予信号发生器不同频率的单频信号,经功放放大后激励初级声源产生需进行控制的初级噪声。参考传声器设置在初级声源前10 cm处;在阵列声源正上方2.0 m(距离地面2.2 m)处设置误差传声器1,在距阵列中心2 m、30°和45°方向处设置误差传声器2 和误差传声器3;距中心阵列1.5 m 高、半径为1.0 m 的圆上均匀设置4个传声器,用来监测进行有源噪声控制时,空间中其他位置的声场变化情况。图9 为系统的布置示意图。
改变初级声源信号的频率,使用单扬声器次级声源和扬声器阵列次级声源对不同误差传声器处的噪声进行控制。基于图9所示的系统分别开展了两组实验进行验证:
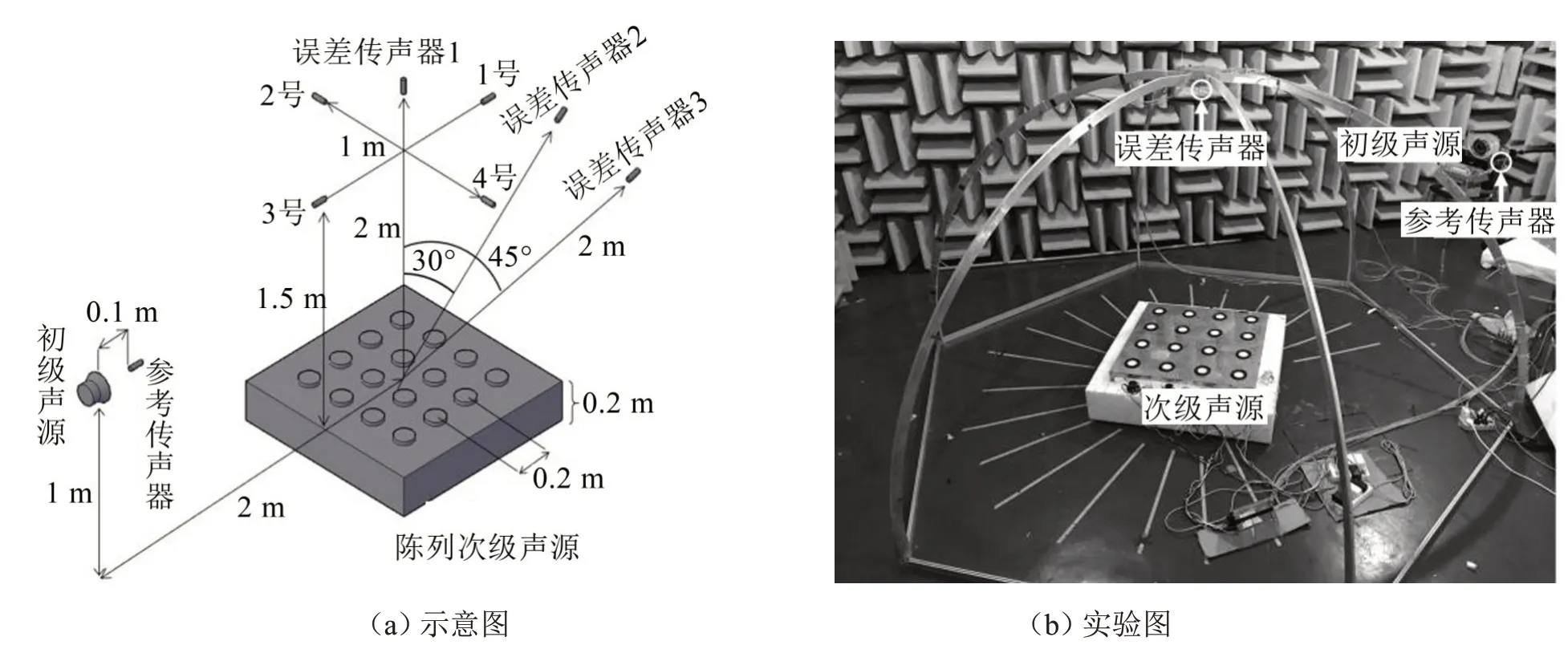
图9 有源降噪实验系统
(1)两种次级声源控制对比实验
分别使用无指向性的单扬声器次级声源和有指向性的扬声器阵列次级声源对误差位置1进行噪声控制,基于实验结果评估两种次级声源的噪声降噪效果和降噪后对空间声场的影响。
(2)不同空间方位噪声控制实验
使用相控阵的方法使扬声器阵列的波束偏转,分别控制空间中方位角为30°和45°的误差位置2和误差位置3处的噪声。基于实验结果评估相控扬声器阵列次级声源对不同空间方位控制点的噪声控制效果和控制后对空间声场的影响。使用单扬声器次级声源分别控制误差位置2和误差位置3处的噪声,将两个误差传声器处的降噪量与扬声器阵列的实验结果进行比较。
实验中采用前馈式控制系统,实验前需使用白噪声法建立次级声源到误差传声器的自适应离线次级通道。次级通道的建立对系统影响较大[24],经调试选择最优的次级通道进行实验。需要指出的是实验环境并非完全理想环境,初级声源具有一定的尺寸,不能完全视为点声源,实验结果会产生一定误差。
3.2 实验结果与分析
实验选取300 Hz、400 Hz 和450 Hz 3 个单频音作为需控制的初级噪声,首先开展两种次级声源控制对比实验。分别使用两种次级声源对误差传声器1处进行噪声控制,采集控制过程中各个传声器的声压级数据。将采集得到的每个传声器声压级初始值作为基准值进行归一化处理,图10为300 Hz单频噪声单扬声器次级声源与扬声器阵列次级声源控制的归一化声压级。
从图10(b)可以看出,在误差传声器1处扬声器阵列次级声源的降噪量更大,控制效果优于单扬声器次级声源的控制效果。在其他区域,引入额外的声源后,传声器1距离初级声源较远,落在图6(b)的区域④中,产生了相消性干涉,声压级略有减小;传声器3距离初级声源较近,落在图6(b)的区域②中,产生了相长性干涉,声压级略有增大;传声器2、4对称放置,具有相同的变化趋势,声压级略增加。
如图10(a)所示,采用单扬声器作为控制声源时,在控制系统达到稳态收敛前,在迭代的过程中各空间噪声监测传声器的声压级变化幅度较大,控制前后声压级的变化会更大一些。以传声器3的声压级变化为例,声压先迅速降低后升高,变化量幅度超过25%,控制系统稳定收敛后声压级增幅比控制前大15%;而采用扬声器阵列作为控制声源时,传声器3 的声压级变化量仅为3.5 %。表2 给出了300 Hz、400 Hz和450 Hz单频噪声最终控制结果及空间区域声场变化情况。
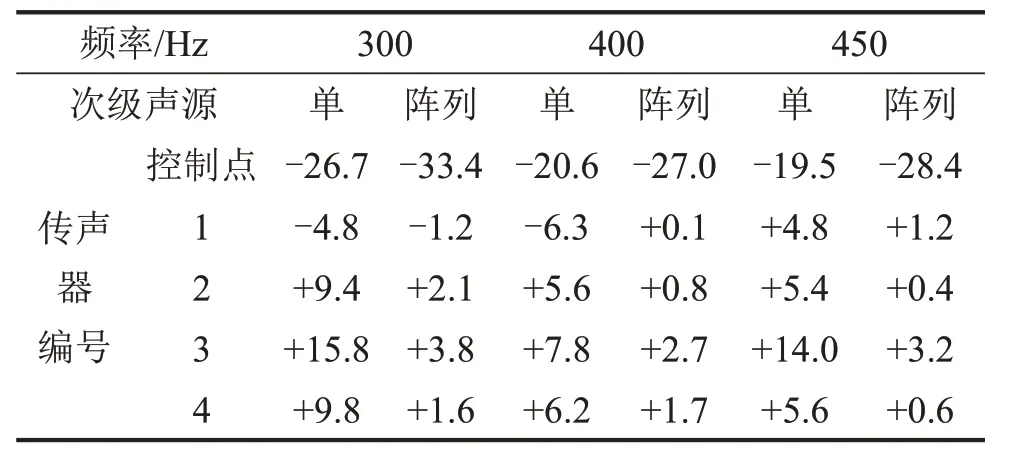
表2 控制点与其他传声器声压级变化量/dB
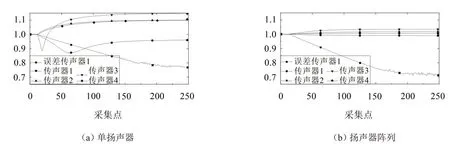
图10 两种次级声源有源降噪效果比较
分析表2 可知,噪声频率为300 Hz、400 Hz 和450 Hz时,对误差传声器1处的噪声进行控制时,扬声器阵列降噪量比单扬声器分别增加6.7 dB、6.4 dB和8.9 dB;扬声器阵列控制时空间区域噪声监测传声器1 至4 的声压级变化也更小,最大增幅仅3.8 dB。与之对应的是,单扬声器控制时,最大增幅达到15.8 dB。实验结果与仿真结果相符,表明有源噪声控制系统中的次级声源设计为扬声器阵列可以得到更好的噪声控制效果,且次级声源对其他区域的影响更小。
为测试相控扬声器阵列的空间跟随降噪能力,进行不同空间方位的噪声控制实验。初级单频噪声频率为300 Hz、400 Hz和450 Hz,分别使用单扬声器次级声源和扬声器阵列次级声源对误差传感器2和3处进行噪声控制,评估单扬声器和扬声器阵列次级声源对声场中不同方向的噪声控制效果。
采集控制过程中各个传感器的声压级变化数据并进行归一化处理,图11 给出了控制方向分别为0°、30°和45°时,采用单扬声器和扬声器阵列次级声源控制时的误差传声器1、2和3的归一化声压级。
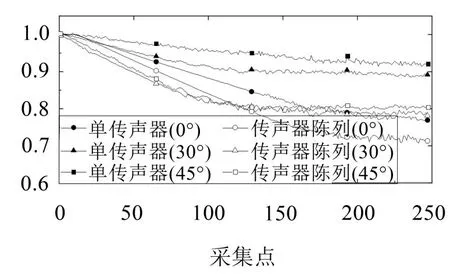
图11 不同控制方向的主动降噪结果
从图11可以看出,当控制方向为次级声源中心轴线方向即控制方向为0°时,单扬声器与扬声器阵列均能获得较好的降噪效果。当控制方向偏离次级声源中心轴线时,单扬声器次级声源的控制效果受偏离角度影响较大,系统收敛困难且降噪量大幅降低。控制方向为30°时,单扬声器仅能使控制点噪声声压级减小10%,当控制方向增大为45°时声压级减小量已不足10%;与之对应的是,扬声器阵列的控制效果受偏离角度影响较小,控制方向为30°和45°时声压级变化量均可达20%以上。表3 给出了控制方向为0°、30°和45°时,两种次级声源对300 Hz、400 Hz和450 Hz的单频噪声的控制结果。
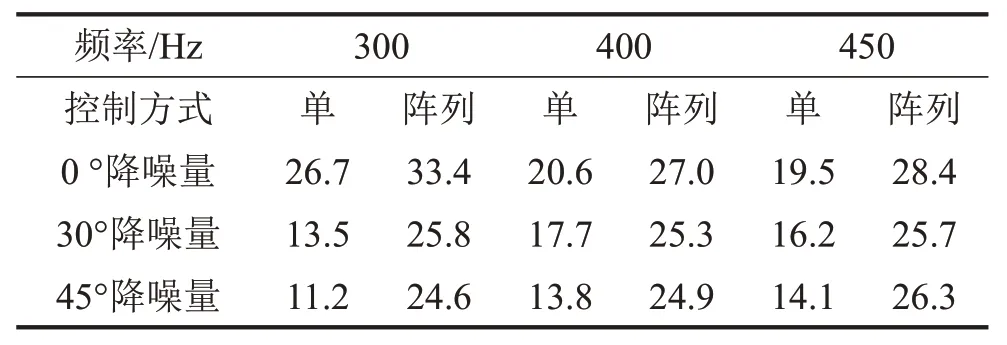
表3 不同控制方向不同频率的平均降噪量/dB
分析表3 可知,控制方向为0°,初级声源为300 Hz、400 Hz 和450 Hz 时,扬声器阵列的降噪量比单扬声器增加了6.7 dB、6.4 dB 和8.9 dB;控制方向为30°,扬声器阵列的降噪量比单扬声器增加了12.3 dB、7.6 dB和9.5 dB;控制方向为45°时,扬声器阵列的降噪量比单扬声器增加了13.4 dB、11.1 dB和12.2 dB。
当控制方向不在次级声源的轴线上时,扬声器阵列的降噪量均大幅优于单扬声器;当控制方向的角度增大时,这种降噪量上的优势会更大。采用单扬声器进行控制时,控制角度越大,降噪量越小,故其降噪范围和降噪量有限;采用扬声器阵列能够获得比单扬声器更好的控制效果,降噪效果均在24.5 dB以上,故其降噪范围更大,降噪效果更好。
4 结语
对某一区域进行有源噪声控制时,引入的次级声源在对该区域降噪的同时造成其他区域声压级变化。将传统无指向性声源作为次级声源的有源降噪系统噪声控制范围较小,降噪量较低。提出了利用扬声器阵列作为次级声源,提高有源降噪系统的降噪量并减少其对其他区域的不良影响。仿真实验和半消声室实验结果都表明,在不改变控制方向时,扬声器阵列的控制效果更好,对其他声场的影响更小,具有以下几点优势:
(1)扬声器阵列次级声源的噪声控制效果优于单扬声器次级声源;
(2)指向性扬声器阵列声能量更集中,次级声源所需声源强度更小,对声场中其他区域的影响更小;
(3)可利用相控方法使主瓣波束偏转,改变有源噪声控制的方向,在更大范围内进行更有效的噪声控制,起到跟随式空间降噪的效果。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
环境保护与循环经济(2021年7期)2021-11-02
声学与电子工程(2021年1期)2021-04-19
作文成功之路·小学版(2020年9期)2020-10-28
计量学报(2020年2期)2020-04-11
声学技术(2019年6期)2020-01-19
演艺科技(2019年4期)2019-03-30
人大建设(2018年11期)2019-01-31
计算机辅助工程(2017年4期)2018-02-01
新课程研究(2016年21期)2016-02-28
