
基于超声波“一发射两接收”模式的运动中测速新型算法
2022-12-22 06:07代沈雪薛名扬
科技创新与应用 2022年35期
代沈雪,杜 增,薛名扬
(辽宁大学,沈阳 110136)
近年来,随着我国经济的高速发展,我国汽车产业迅速崛起。据工信部网站公布的统计数据,2021年我国汽车年产量为2 608.2万辆,销售量为2 627.5万辆,已经连续7年位居世界首位。据中国政府网公布的相关信息,2021年全国汽车保有量为3.02亿辆,汽车驾驶人达4.44亿人。根据中国统计年鉴公布的统计数据,2020年我国发生交通事故24 467起,由交通事故造成的直接财产损失为131 360.6万元。行车安全已经成为关乎每个家庭和个人生活质量的重大公共问题。如何通过技术手段不断提高汽车驾驶的安全系数,减少交通事故发生的概率,在发生交通事故后能够为交管部门进行交通违法行为判罚和交通事故责任认定提供科学、准确、客观的数据信息等系列问题具有重要的实际应用价值和社会意义,也是众多汽车厂商和科研团队进行技术研发的重点方向。日前,工信部要求自2022年1月起,新生产的乘用车必须配备符合GB 39732—2020《汽车事件数据记录系统》规定的事件数据记录系统(Event Data Recorder,简称EDR),也被称为汽车黑匣子。EDR大多被集成安装在安全气囊控制单元(ACM)模块内[1]。当车辆发生碰撞等突发情况导致速度剧烈变化达到阈值时,EDR系统将被触发工作,自动记录碰撞前、碰撞中及碰撞后3个阶段数秒的汽车运行速度、纵向加速度、发动机转数、刹车开关状态和方向盘转向角度等多方面关键数据[2]。目前,EDR系统只能在汽车速度发生急剧变化达到阈值时,才能被动触发进行记录,且存在数据记录容易被覆盖、丢失等问题,更无法实现对车辆自身行驶状态以及车辆以外其它车辆或物体的运行状态进行主动记录等功能,不能主动有效规避交通事故发生风险。
1 概述
一直以来,车辆行驶速度的测量和行驶轨迹的记录在交通安全管控中具有极其重要的意义,但传统的车辆行驶速度测量方式采用静态测量平台,即需要测量设备处于静止装态时才能实现对车辆运动速度进行测量。如果能够实现测量设备在运动状态下对迎面或周围行驶的车辆等物体进行速度测量及行驶轨迹记录甚至行驶轨迹预判,一方面可以用来有效地减少或避免交通事故的发生,另一方面在交通事故发生后也可以为交通违法行为判罚和交通事故责任认定提供科学、准确、客观的数据信息。因此,对于此类技术的研究具有极为重要的实际应用价值和社会意义。
本文提出了一种在测量方与被测量方均处于运动状态下的速度测量方案,在对实际问题中车辆等物体进行简化后,构建了一个在二维平面内运动状态下进行速度测量的新型测速模型。通过数学建模和实验模拟,计算得出了被测方的运动速度,在理论上验证了这种测量方法的有效性,同时也为未来进行多物体速度测量及描述被测物体运动轨迹做了准备工作。
2 基本原理
首先,把在路面上行驶的汽车进行模型化,将测量车与被测量车的位置关系投影到二维平面内进行模拟,根据此模型中物体间的几何关系,计算出被测车相对于测量车的距离、速度等物理量。
目前,常见的测距或测距方法有激光、超声波及红外线等,在进行理论建模和实际模拟时选择使用了超声波测距模块,主要考虑到超声波测量在技术上容易实现、操作相对简单、适用范围广和受环境因素影响较小等优点[3-5]。超声传感器测距模块可以连接在单片机上,通过计算源声波信号发送时刻和反射回波信号接收时刻的时间间隔并结合超声波在空气中传播速度来获取被测量物的距离信息,再连续对多次测量的结果进行存储、编程,可自动计算求得被测物体相对测量物体的运动速度等物理量[6]。本文采用的新型“一发射两接收”超声波测距测速模型,在实验中是通过搭载单片机的智能小车机器人来实现的。2台机器人小车间通过单片机实现实时通讯,被测方(对方)小车的单一发射器发射的一个超声波信号被测量方(己方)小车的2个接收器接收后,可测得被测方(对方)小车分别相对测量方(己方)小车2个接收器的距离。再根据已知的2个接收器间距离,可构成1个三角形的三边关系,通过计算三角形三边的数量关系并对测量和计算结果进行存储和编程,可以计算得到2个小车之间的相对距离和相对速度。结合测量方小车的定位模块提供的位置、速度等信息,即可计算得到被测方小车的实时位置、速度乃至运动轨迹等信息。
3 所用传感器模块
在本模式中使用超声波单体发射模块和单体接收模块,将2个超声波接收装置A、B分别安装在己方小车的车头左右,并将此简化为测量方A、B点与二者之间的连线,将一超声波发射装置安装在对方小车车头前方中间,并将此简化为被测方C点,如图1所示。
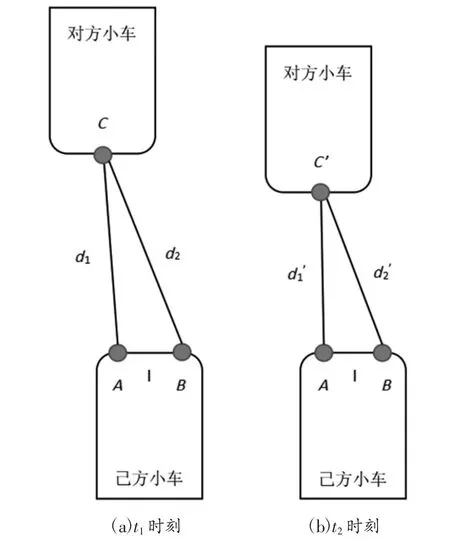
图1 超声波模块安装示意图
本文使用光电槽型光耦传感器进行自身车速测量,槽型光耦也被称作槽型光电开关或者对射式光电开关。此模块由1对红外线发射与接收管和光码盘构成。原理为发射管发射出的红外线,当沿检测方向遇到障碍物(光码盘反射面)时,则反射回来被接收管接收。这样在电机所连的光码盘旋转过程中对红外线实现阻断和导通,可在接收管上感应出电流变化并实现开和关的判别。由此得知码盘所转周数进而计算出电机转速和小车速度。
4 算法
在超声波模块持续测量过程中,选取一测量方得到距离测量结果的时刻t1和经Δt之后,得到下一次距离测量结果的时刻t2,此时被测方所处位置由C点位移至C’点。则可知在t1时刻被测方C点距测量方A点距离为d1,距测量方B点距离为d2;在t2时刻被测方C’点距测量方A点距离为d1’,距测量方B点距离为d2’。测量方A、B 2点间距安装时已确定为l。
以测量方A点为坐标系原点,以测量方A点与测量方B点连线所在直线为x轴,建立(图2)平面直角坐标系。
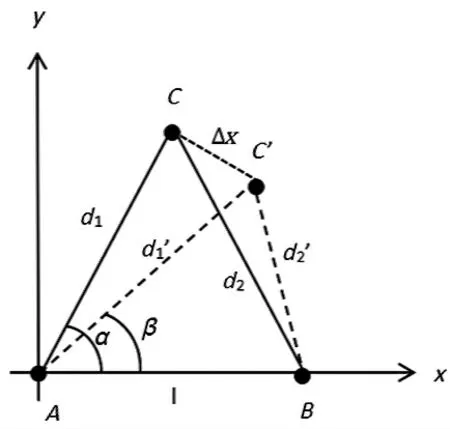
图2 平面直角坐标系下的测量模型
则t1时刻有
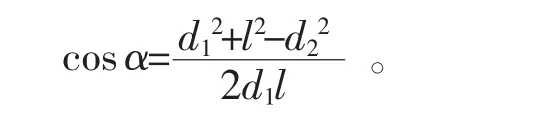
由本模式原理知,sinα>0,

设C点坐标为(x1,y1),有
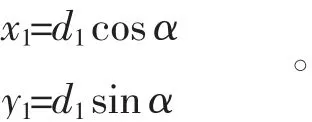
t2时刻有
由本模式原理知,sin β>0,

设C’点坐标为(x2,y2),有

在Δt时间内,将测量方视为静止,由于Δt很小,近似地将被测方视为直线运动,可得Δt时间内,被测方发生的位移为C点与C’点间距离为

此时可求得被测方运动的平均速度,并将此近似为瞬时速度,而此速度实际上是测量方与被测方的相对速度,有

将相对速度v沿x方向与y方向分解(图3),

图3 相对速度分解
得

规定以x轴正方向为x轴速度分量正方向,以y轴正方向为y轴速度分量正方向。根据测量方A、B点连线上任一点的速度在x轴上的分量vx′与在y轴上的分量vy′,可算出被测方的实际速度vc为

本次速度测量结束后,立刻会进入下一次的速度测量,如此循环进行即可测得被测物的实时速度。
5 误差
5.1 所用测量模块误差
5.1.1 超声波模块距离测量误差
本模式气介状态下影响超声波测距精度的主要因素有:压力、环境的温度、介质均匀是否稳定。其中超声波对温度的变化更为敏感,当处于有温度梯度的环境或进行补偿时温度测量误差大则超声波测量误差也会比较大。而在实际恒温环境下,经监测发现超声波模块仍可传回一些不准确数据。导致此情况的主要因素有:环境的噪声、落叶等随机飘动物体、目标体上其他构件或表面不平整等。尤其是在颠簸道路上行进时非常容易出现上述情况[7]。
5.1.2 槽型光耦转速测量误差
利用槽型光耦进行转速测量时产生误差的主要原因有:器件抗干扰能力差、自身携带误差、传感器安装精度不高和入射角度不正确等。尤其是在强光直射场所中应用时应有适当遮挡,当传感器处于烟尘、水雾较大或是电磁干扰环境中时,也会产生较大误差。
5.2 方法误差
在3次连续对被测方的测距中,Δt时间内,将测量方视为静止,由于Δt很小,近似地将被测方视为直线运动,而实际情况下,被测方并不一定是理想地直线运动。此外,求得被测方运动的平均速度并将此近似为瞬时速度,实则忽略了被测方实际瞬时速度。由此2个将产生方法误差,其大小主要取决于Δt的大小,根据微元思想,Δt越小,则此误差越小。
实际上带来误差的因素还应包含单片机的数据计算处理速率、超声波测速模块和槽型光耦测速模块数据传输回单片机的时效性和对应性等。
6 结束语
以交通轨迹记录与预判研究为背景,提出了一种新型速度测量算法,即测量方与被测方均处于运动中时,测量方对被测方速度进行测量的一种模式。此模式打破了常规方法的一方处于静态才能进行速度测量的局限,为与智能碰撞警告等模块结合并应用于车载轨迹鉴定系统提供可能。本模式也可应用于开拓手持测速仪等测速仪器的功能。
实现交通轨迹记录与预判能够在行车过程中异常情况发生当时智能地作出警告以提醒驾驶员或当即采取一定措施阻止交通事故发生,保护生命财产安全;此外,当事故发生后,也能够为事故原因分析提供依据[8]。此模式不仅是探究交通运动轨迹记录与预判的基础,对于交通事故责任判定有直接重大意义,而且对于有同样速度测量需求的各类研究、应用也有促进意义。
猜你喜欢
四川劳动保障(2021年10期)2021-12-02
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
小雪花·成长指南(2020年2期)2020-10-12
文苑(2018年22期)2018-11-19
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
电子制作(2018年8期)2018-06-26
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
