梨园疏花机械化研究现状
2023-01-03 06:08冯生张秀花杨云磊李江涛张艺孔德刚
农业与技术 2022年24期
冯生 张秀花 杨云磊 李江涛 张艺 孔德刚
(河北农业大学机电工程学院,河北 保定 071000)
引言
我国是世界上第1水果生产大国,2021年我国果园面积为12646.28hm2[1]。随着产业结构调整,林果生产已逐渐成为农民增收的支柱产业。近年来,随着果园管理向规模化、标准化、机械化和智能化方向推进,农民对新技术的需求不断提升,果园管理机械化已成为林果产业生产的重点任务[2]。我国农作物综合机械化已达70%[3],但梨园多为传统种植模式,机械化率仍低于20%[4],加之农村人口城镇化、非农产业人口聚集化的发展态势,大力推进果园生产机械化,直接关系着果园成产成本和健康发展[3]。
疏花为果园管理中主要的费工环节之一,劳动成本高、劳动强度大,果农亟需新技术代替现有的传统人工管理方法。本文将通过疏花的农艺特点,重点阐述疏花机械发展现状,分析我国疏花机械化程度及智能化的差距,剖析限制疏花疏果机具发展的因素,为果园疏花设备的发展提出展望。
1 疏花农艺要求
疏花是指在花序分离期通过破坏花柄的方式减少花量,减少坐果,疏花时间一般为4月,从初花期直到落花期均可进行。通过疏花可抑制赤霉素分泌,促进花芽分化,避免大小年[5],对坐果率、树梢及叶片的生长、翌年的产量等起着至关重要的作用。
以梨树为例,疏花时一般先疏花序后疏花朵;疏花序时,一般在每隔20~25cm处保留1个粗壮健康的花序[6],过程中注意保留该花序的莲座叶及果台副梢,疏花朵时,将花序疏至2~3朵花为宜,中心花不留;全树花朵保留率在20%~50%为宜[5]。由此可见,疏花时效性强,精细化程度要求高,疏花机械化和智能化技术难度大,是果园管理的重要发展方向。
2 国内外疏花设备发展现状
疏花设备分为人工、半自动和智能化3个层面。
2.1 人工疏花设备
人工疏花设备分为2类,剪刀式和手持杆式。
剪刀式中最具有代表性的是双口剪,如图1所示,进行疏花作业时,将需要保留的花柄或果柄放入保护槽内,边花和果柄会自然夹在保护槽两边的剪刃中,闭合剪刀即完成相应花果柄的保留和修剪。

图1 双口剪
对于手持杆式疏花设备的研究,国内外均有涉及。2010年,B Martin-Gorriz等[7-9]设计了4款疏花器结构形式,分别为六指转动式、双列柔性绳式、四列柔性绳式、振动筛式,如图2所示,经试验得出,4种装置疏花效果相近,收获期果实的数量减少了38%,果实大小增加了47%。
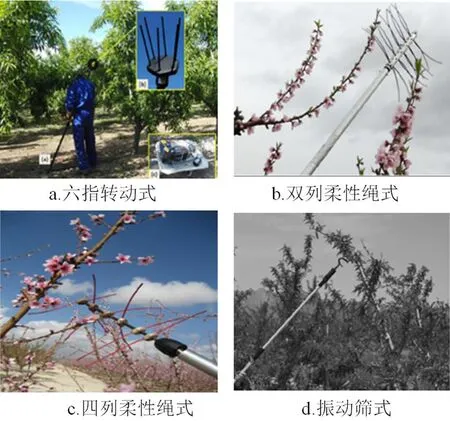
图2 4种疏花器结构形式
图3所示的是旋转刃片式疏花器,作业时,手持杆顶部的直流电机带动刃片旋转,切断目标花柄即可完成疏花。2020年,吕晓兰等[10]设计了一种电动甩绳式疏花机,如图4所示,在小冠疏层形和“Y”字棚架形翠冠梨园中进行试验,得出花蕾保留率为

图3 杆式电动疏花疏果器

图4 电动甩绳式疏花机
49.46%~52.52%。
双口剪及旋转刃片式疏花器由于其质量轻、便于操作、售价便宜,在人工疏花过程被中广泛使用;其余人工疏花设备尚处于不成熟的试验和研发阶段。
2.2 半自动疏花设备
半自动疏花设备一般为自走式,根据作业原理不同可分为振动式、单轴柔性绳甩动式、多轴柔性绳甩动式。
2.2.1 振动式疏花机
该类疏花机的工作原理是指通过激振或敲击的方式使树的主干或枝条振动,使得花朵或幼果脱落,从而达到疏花的目的。
1984年,A G Berlage等[11]联合美国农业部(USDA)设计了一种自走式树干振动疏花机,见图5。通过冲击器振动树干落花。2005—2006年,美国农业部Donald L Peterson等[12]设计的用于柑橘收获的车载疏棒式振动器,经改进用于盛花期后52~55d的商业桃园的疏花和疏果,见图6。发现当击打频率为260次·min-1时效果最好,后续手工疏除时间节约了54%~81%,果实质量较优。

图5 自走式树干振动疏花机

图6 疏棒式振动疏花装置
根据以上描述,振动式疏花设备可分为摇晃式和击打式。摇晃式是指通过振动装置使枝条或主干摇晃,从而使花朵掉落;击打式是指通过疏棒击打树冠从而落花。振动式疏花设备为疏花较早的研究内容,由于其对树体损伤较大,疏花不均匀,导致近几年对其的相关研究较少。
2.2.2 单轴柔性绳甩动式疏花机
该类疏花机的工作原理是通过单个疏花轴旋转,使得附着在上面的柔性绳甩动,从而击落花果,以达到疏花的目的。
1988—1990年,Tara A Baugher等[13]为测试树宽绳帘式疏花装置和旋转绳帘式疏花装置的性能,见图7a、图7b,对桃树进行试验验证,得出旋转绳帘式疏花装置的疏花效果更好。
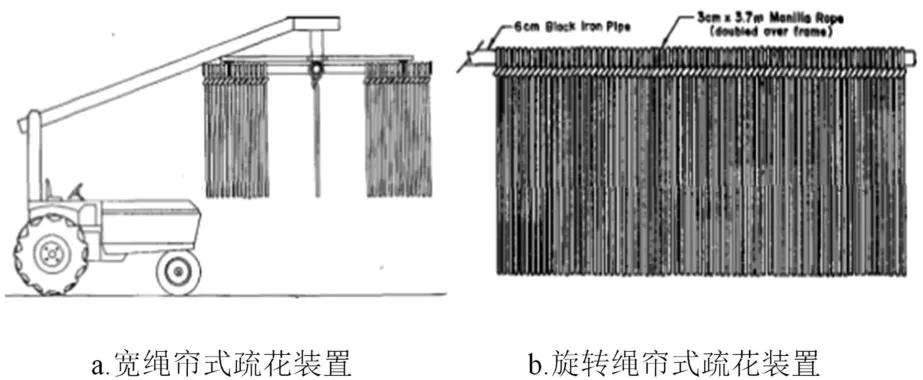
图7 树宽绳帘式及旋转绳帘式疏花装置
2007年,Schupp J R等[14]将德国H Gessler设计的Darwin 300疏花机,见图8,在有机苹果园进行评估。经测试得出疏花机减少了36%的花量,节省了后续20%~42%的人工疏花时间,果实大小增加了35%。

图8 Darwin 300柔性疏花机
2009年,Tara A Baugher等[15]设计1种混合柔性绳疏花机,见图9,用于花瓶树冠和倾斜树冠的疏花。疏花转轴由液压马达驱动,转速为150~250r·min-1;疏花轴的高度和角度可根据树冠的高度和倾角调整;拖拉机的速度范围为1.5~3.0km·h-1。该机械可通过改变主轴转速、拖拉机行进速度和疏花条布置来调节疏花强度,得出疏花率在17%~56%。

图9 混合柔性疏花机
法国La Canne Vale公司生产了疏花装置ECLAIRVALE,见图10。疏花执行装置的作业类型为单轴式疏花,作业对象是杏树和桃树,其作业特点是无动力驱动,由拖拉机拖动疏花执行装置在田间行进,通过疏花轴上的弹性棒与花朵间的相互作用达到疏花的目的;弹性棒磨损后便于装拆。疏花效率较高,可在1h内完成20人1d的工作量。

图10 疏花装置ECLAIRVALE
2018年,河北农业大学杨欣等[16]设计了一种矮密果树疏花装置,见图11,试验中对疏花条横截面积、密度、长度及材料进行试验验证,对矮砧密植苹果和主干形密植桃树进行疏花试验,测得疏花轴转速在350~370r·min-1时疏花效果显著。2020年,对该疏花机增加了挂接装置、滚动导轮和液压油管固定板[17],如图12所示,并在主干形桃园、Y形桃园进行疏花试验,结果表明疏花轴转速在360~400r·min-1,拖拉机前进速度为2km·h-1时疏花效果显著。

图11 矮密果树疏花装置

图12 桃树疏花机
单轴柔性绳甩动式疏花机的研究进度较成熟,其共性特征及主要疏花功能可分为3点,疏花轴的转速,机架的角度仿形调整,机架与树体间的距离调整。该类机具具有操作简单、树体适应性好的优点,但由于其主要为树冠外部作业,导致其对树冠内部的疏除效果较差。
2.2.3 多轴柔性绳甩动式疏花机
该类疏花机相较于单轴式的相同点在于工作原理相同,不同点在于该类机具的疏花轴数量多,且均为一端铰支,一端自由,可将自由端深入树冠内测进行疏花。
2007年,L Damerow等[18]研制了一种拥有3个疏花轴的疏花机,见图13,3轴的角度均可调;在苹果果园进行的疏花试验时,发现当疏花轴转速为320r·min-1时,疏花效果最好,单侧疏花1.2h·hm-2,比人工疏花时间节省了20%,对叶片损伤小于8%。

图13 三转轴式柔性疏花机
2019年,雷哓辉等[19]研制出了一种三节臂式疏花机,见图14,并在“Y”字棚架形翠冠梨园进行疏花试验,确定了疏花轴转速为254r·min-1,拖拉机行进速度0.44m·s-1,疏花机疏花与人工疏花质量基本一致,疏花效率高,绝对坐果率降低但不影响定果后果实品质。

图14 三节臂机载式疏花机
多轴柔性绳甩动式疏花机相较于单轴式,其疏花轴的运动方式较灵活,可对树冠内测进行疏花,但操作复杂;且为避免深入树体疏花轴与树枝间发生碰撞,对作业树体要求较高,主要为疏层形、开心形果树。
半自动化疏花蔬果设备作业特点汇总如表1所示。振动式疏花机由于作业时损伤树体,没有推广应用;单轴式与多轴式设备可以达到较好的疏除标准,成为近年来比较主流的研究对象。

表1 半自动疏花设备主要作业特点
2.3 智能化疏花设备
该类疏花设备是指在半自动设备的基础上,在执行装置上进行智能化改进升级。
2011年,Matthew Aasted等[20]研发了一种使用激光雷达检测冠层的方法,如图15所示,为避免复杂的人工曲线驾驶,见图15a,采用激光传感器进行距离及仿形检测,见图15c,利用疏花执行机构自动沿着树冠轮廓运动及树冠仿形,见图15d,拖拉机得以直线行进,见图15b。
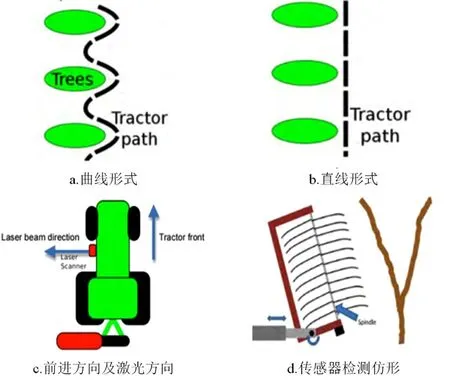
图15 激光雷达冠层仿形疏花机
2012年,Michael Nielsen等[21,22]开发了适用于并行处理的立体视觉算法,并采用3台同步的1000万像素摄像机和1台闪光灯组成了图像采集标定系统,该系统用于校验花朵的3D位置,从而控制执行装置进行自动疏花作业,如图16所示。
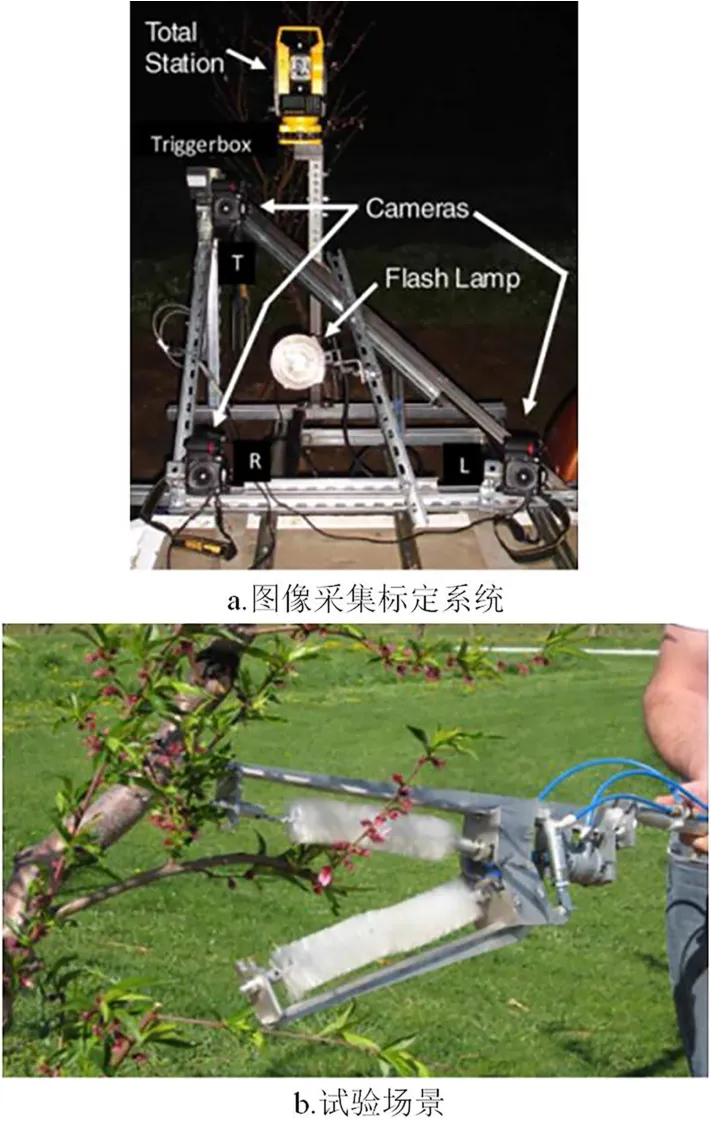
图16 基于立体视觉算法的自动疏花装置
2015年,D J Lyons等[23]根据运动学目标定位和处理器中设置的启发式算法,对桃花进行图像识别,通过控制机械臂上的末端执行器进行选择性疏花,如图17所示。
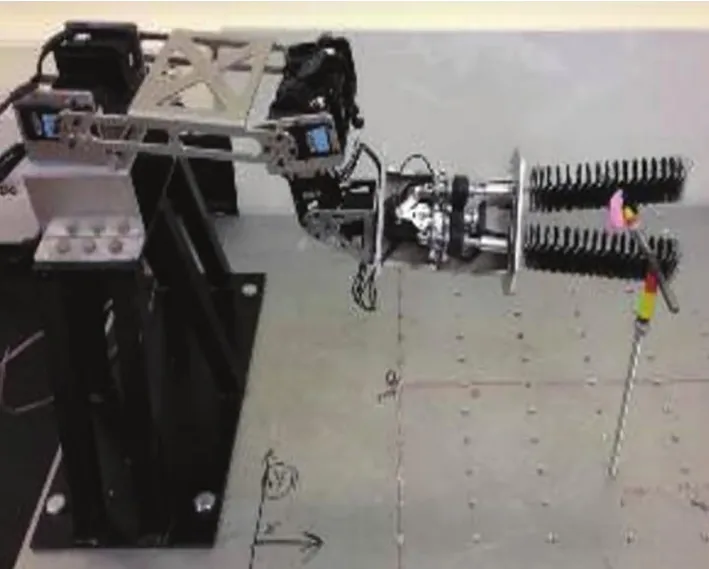
图17 基于目标定位及启发式算法的自动选择疏花装置
2015年,Niels Wouters等[24]研制了一种用于梨花芽检测的多光谱摄像系统,花芽检测率达87%,错误检测率低于16%,检测结果如图18所示。
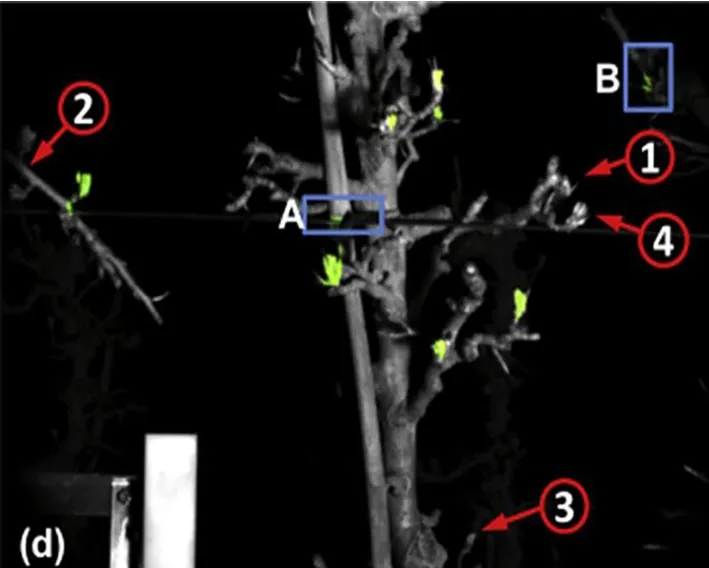
图18 多光谱摄像系统检测结果
2017年,德国Adolf Betz公司开发了SmaArt自动疏花影像系统[25],目的是获得花的密度和主轴转速之间的最佳搭配,如图19所示,摄像机检测到每棵果树的开花密度,并将数据实时传给车载电脑,随后车载电脑计算最佳主轴转速,最终控制疏花轴的转速。

图19 装备疏花影像系统的柔性疏花机
2016年,华南农业大学李君等[26]设计了一种悬挂式电动柔性疏花机,如图20所示,将树冠仿形关联式与超声波冠形探测方法相结合,提高了疏花机对荔枝树冠仿形疏花的适应性。

图20 悬挂式电动柔性疏花机
2020年,西北农林科技大学的Dihua Wu等[27]提出了一种基于YOLO v4通道剪枝深度学习算法的实时苹果花检测方法。测试结果显示,推理检测时间下降了39.47%,mAP可达97.31%,实时检测结果如图21所示。

图21 基于YOLO v4的苹果花检测结果
2021年,武汉理工大学的Kaiqiong Sun[28]等提出了一种不同环境下苹果花、桃花和梨花的自动检测方法,利用苹果花数据集对语义分割网络DeepLab-Res-Net进行了微调。在相同的数据集下,苹果花的识别率达89.6%,比过往方法提高了6%;桃花和梨花的数据集,识别率达80.9%,比过往方法提高了5%,3种花朵的实时检测结果如图22所示。

图22 实时检测结果
通过对国内外智能化疏花设备的阐述,汇总智能化疏花设备的智能化程度如表2所示。

表2 智能化疏花设备智能化程度
3 疏花机械化发展的限制因素与未来发展方向
3.1 疏花机械化发展的限制因素
我国疏花机具已有初步进展,但仍存有以下限制因素。
3.1.1 果园管理模式缺乏标准化
国内现有果园大多是以家庭为单位的分散种植经营模式,行距株距不标准、树形各异、长势不一,大规模机械化存在困难。
3.1.2 疏花设备研究处于起步阶段
目前主要研究内容均为探究机具行进速度,疏花轴转速,疏除元件材料,以及设备结构方式对疏花效果的影响,但研究成果较少且停留于试验阶段。
3.1.3 疏花智能化技术研究不足
我国现有疏花机械智能化、信息化研究刚起步,灵活性较差,不能应对果园复杂的工作环境。
3.2 疏花机械化未来发展方向
3.2.1 规范果园栽培管理标准
促进果园树形、行距、株距等作业对象指标的标准化、科学化,统一管理标准,探究出既适合果树丰产又适合机械化管理的果树栽培模式,进一步提高机械化疏花效果。
3.2.2 加强疏花机械信息化、智能化技术研发
利用大数据、物联网进一步加强对果园进行实时监控,实现精准疏花,使得农艺农机实现精准对接。
3.2.3 充分结合果园疏花作业模式和环境实际
充分做好实际调研和田间试验,及时发现和解决果园对机械化应用的影响,增加疏花设备的实用性和可靠性。
猜你喜欢
科学导报(2023年23期)2023-04-17
今日农业(2022年16期)2022-09-22
农业工程学报(2022年1期)2022-03-25
中国果业信息(2021年7期)2021-12-01
快乐语文(2021年27期)2021-11-24
东方企业家(2020年5期)2020-05-29
阅读(低年级)(2019年9期)2019-11-15
文学港(2019年5期)2019-05-24
小学生作文(低年级适用)(2017年9期)2017-10-13
农家参谋(2017年4期)2017-08-13