基于ISPSO-VMD-MCKD的亚像元峰值提取方法*
2023-01-06 05:37刘福康杨光永吴大飞徐天奇
计算机与数字工程 2022年10期
刘福康 杨光永 吴大飞 徐天奇
(云南民族大学电气信息工程学院 昆明 650000)
1 引言
粒子群算法(PSO)数学模型简单、参数少、易于实现,已经被广泛应用于参数寻优,路径规划等多方面。但其性能易受参数影响、极易陷入局部最优[1]。为此,诸多学者对PSO算法进行了改进,例如:为增强算法摆脱局部极值的能力,高鹰等将模拟退火思想引进PSO[2],在一定程度上改善了粒子群优化算法摆脱局部极值点的能力。为拓宽粒子的搜索空间,Liang等提出了学习粒子群算法[3],提高了算法的收敛速度。康岚兰等提出了无惯性自适应精英变异反向粒子群优化算法有效增加了种群多样性[4];胥小波等提出了将混沌思想引入粒子运动的混沌粒子群优化算法,提高了算法计算精度和全局寻优能力[5];赵新超等提出了一种基于非均匀变异和多阶段扰动的粒子群优化算法,兼顾了算法的多样性和精英学习强度间的关系[6];夏学文等提出的一种具备反向学习能力和局部学习能力的粒子群优化算法,在高维函数优化中表现较好[7];为避免算法陷入局部最优,增强算法的局部搜索能力,刘超等将天牛须算法引入PSO[8];郭瑞等将混沌变异引入PSO[9]。为解决PSO易陷入局部最优问题,刘浩然等提出一种改进雁群扩展粒子群算法[10];张叶等提出一种将“概率突跳特性”引入PSO,并设定新的淘汰机制,提高了算法的全局寻优性能[11]。
上述改进策略都在一定程度上改善了PSO算法的性能,但同时大幅增加了算法复杂度。为此,本文提出一种粒子数和迭代数相结合的动态调整种群学习率的方法。为提高算法的收敛速度的同时降低算法复杂度,将该方法与胡旺等不含速度项的简化粒子群算法(SPSO)[12]相结合,提出了改进简化粒子群算法(ISPSO)。将ISPSO算法与变分模态分解(VMD)和最大相关峭度反卷积算法(MCKD)相结合,提出了一种新的提取亚像元峰值的方法。
2 标准粒子群算法
PSO通过式(1)确定k+1次迭代时粒子i的位置xi(k+1)和速度vi(k+1):
其中:w为惯性因子,c1为个体学习率,c2为种群学习率,r1、r2为0~1的随机数,Pi为第i个粒子当前寻找到的最好位置,Pg为所有粒子找到的最好位置,Δt为单位时间,k、k+1分别表示第k次迭代和第k+1次迭代。
而SPSO算法不含速度项,降低了PSO算法的复杂度[12],k+1次迭代时粒子i的位置xi(k+1)为

PSO和SPSO中第k次迭代时惯性因子w更新策略为,如:

其中kmax为最大迭代次数,wmin、wmax分别为人工预设的惯性因子的最大值和最小值。
3 改进粒子群算法
为提高PSO的收敛速度,针对PSO中的固定种群学习率c2进行改进。提出k次迭代时粒子i的种群学习率c2更新公式:

其中:a1、a2为缩放因子,n为粒子群粒子个数。
将该更新策略引入PSO,提出IPSO。为使改进粒子群算法迭代速度加快,将上述种群学习率更新策略引入SPSO,提出改进简化粒子群算法(ISPSO)。
至此,提出的两种优化算法IPSO与ISPSO,具体步骤如下:
Step1初始化粒子群:给定惯性因子wmin、wmax等参数,初始化粒子位置;
Step2计算初始粒子适应度值;
Step3更新个体极值:将粒子i的当前适应度与个体极值适应度比较,若前者更优,则更新个体极值;
Step4更新全局极值:将粒子i的当前适应度与全局适应度比较,若前者更优,则更新全局极值;
Step5更新迭代种群学习率c2;
Step6更新惯性因子w;
Step7 IPSO更新粒子位置x和速度v或ISPSO更新粒子位置x;
Step8达到最大迭代次数退出算法,否则转至Step2。
4 实验仿真分析
为确定种群更新公式中的两个参数取值对算法的影响和验证算法性能,寻取3个常用基准函数如表1所示。
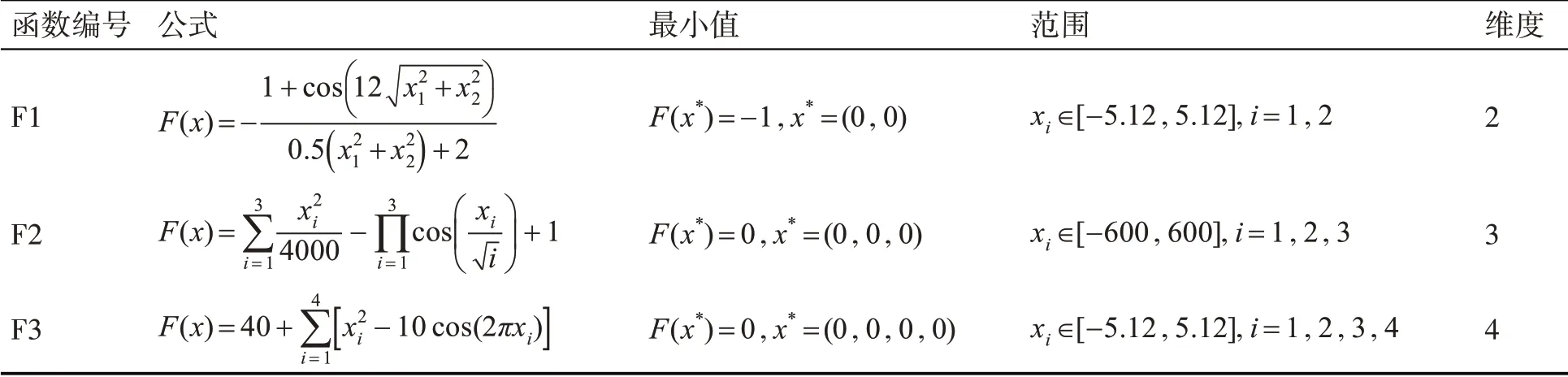
表1 基准函数表
4.1 学习率参数分析
学习率更新公式中参数a1、a2是算法性能的重要影响因素之一,设当a1为自变量时a2=100,当a2为自变量时a1=0.6,以Drop-Wave函数在种群数n=30时,IPSO、ISPSO分别独立运行1001次,计算算法收敛所需迭代次数平均和寻找到的最优值平均值。参数a1、a2的变化对算法平均收敛速度和准确度平均值的影响如图1所示。
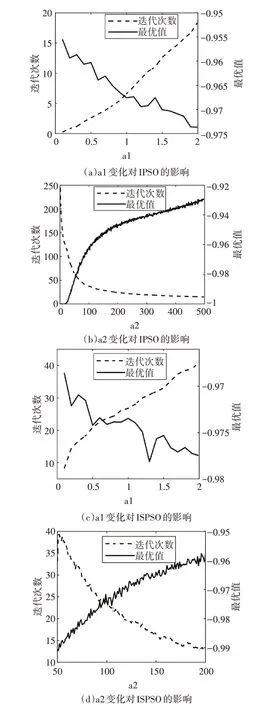
图1 学习率参数变化对算法影响图
图1中四幅图分别表示IPSO算法、ISPSO算法在不同缩放因子a1、a2下的学习曲线。从图1(a)可以看出IPSO算法种群学习率缩放因子a1增加时收敛精度上升,但同时,收敛速度会有所降低;图1(b)可以分析得出IPSO算法缩放因子a2增加时收敛精度降低,但收敛速度会上升。同理,图1(c)、(d)可以得出ISPSO算法缩放因子a1增加时收敛精度上升,收敛速度降低;缩放因子a2增加时收敛精度降低,收敛速度会上升。
4.2 IPSO、ISPSO算法性能验证
在本小节中,分别将PSO算法、IPSO算法、SPSO算法、ISPSO算法对三个常用基准函数进行1001次独立寻优,设a1=0.01,a2=9,寻优结果如表2表示。由表2可知,4个算法中PSO的收敛精度更高,其次为ISPSO,但其他算法收敛精度较之PSO变化不大。各个算法在不同函数下收敛曲线变化图如图2所示。
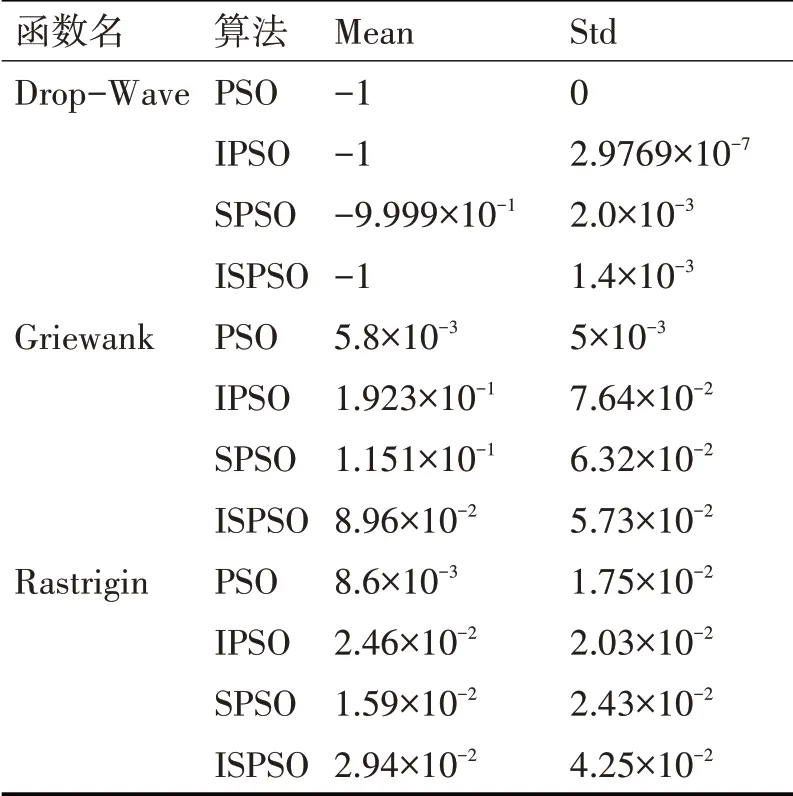
表2 算法寻优结果均值和方差表
从图2(a)、(b)、(c)的三幅收敛曲线图可得,在四个算法中,PSO算法虽收敛精度较高,但收敛速度最慢。IPSO算法收敛精度最低,但收敛速度比PSO算法稍快一些。SPSO算法有着较快的收敛精度和收敛速度。收敛速度最快的是ISPSO算法,且其收敛精度仅次于PSO算法。

图2 drop-wave、griewank、restrigin下不同算法收敛对比分析
5 ISPSO用于亚像元峰值提取
VMD算法和MCKD算法的参数选择对处理信号的结果影响较大,因此,合理对算法参数进行选择至关重要。采用IPSO算法对VMD及MCKD参数进行寻优选择是有效并且可靠的。
亚像元信号提取的主要任务是将激光位移测量系统(LDMS)的模拟前端(AFE)混合信号中的噪音信号抑制或消除,提取出激光位移信号分量或多重反射信号[13]。
5.1 ISPSO应用于亚像元峰值提取
线阵CCD激光位移传感器测量物体的位移时,被测物体的位移、透明度、介质吸收系数、厚度、表面粗糙度、光点直径和折射系数等因素均会对AFE的信号造成影响,使得AFE的输出信号为包含激光位移信号、多重反射位移信号、高斯白噪声、瑞利散射噪声等的混合信号[14]。
变分模态分解(VMD)可将一个复杂信号分解为有限数量的IMF之和[15],首先利用VMD对AFE输出信号进行信噪分离。由ISPSO寻找VMD的最优模态分解个数K和二次惩罚因子α。设定适应度函数:

混合信号经过VMD分解为K个IMF分量后,计算各个分量的峭度系数,噪声分量的峭度系数相对较小,选取峭度系数高的IMF分量信号重构,再对重构信号进行MCKD分解。
MCKD以最大峭度作为目标函数,通过迭代寻找一系列的FIR滤波器,使得原始周期性冲击序列的相关峭度最大[16],其结果受滤波器长度L、解卷积周期T、位移数M等的影响。利用ISPSO对MCKD寻最优滤波器长度L、解卷积周期T、位移数M。设适应度函数为

其中Q为处理后信号的包络谱峰值因子,P为原信号最高值点经MCKD处理后的值。β3、β4为缩放因子。
5.2 实验平台搭建及ISPSO_VMD_MCKD方法可行性验证
采用基恩士的LK-081激光位移传感器,测量试验台与激光位移传感器之间的距离,实验平台如图3所示,提取出的激光位移电信号如图4所示。
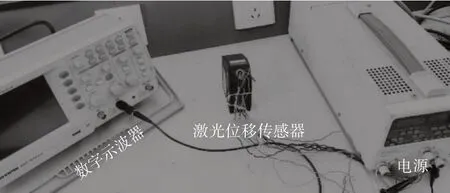
图3 实验平台图

图4 实验采集激光位移信号图
以式(5)中Ad为适应度函数,β1=0.5,β2=1,通过ISPSO算法对VMD参数的模态个数K和惩罚系数α进行寻优,得K=5,α=438激光位移信号经VMD分解得各IMF如图5所示。

图5 真实数据经VMD分解结果图
得到IMF1~IMF5的峭度系数为IMF1=16.2845;IMF2=14.4154;IMF=33.3531IMF=43.2383;IMF5=3.3277。
判定IMF3~IMF5为无用噪声信号,将IMF1和IMF2进行信号重构,得如图6所示信号。
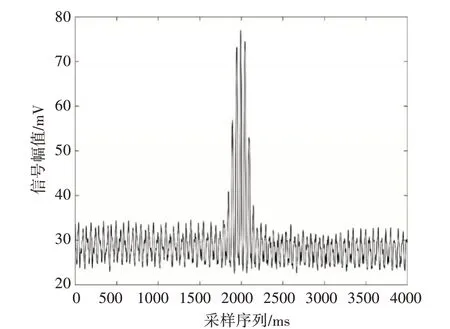
图6 真实数据经VMD分解后重构结果图
对重构后的信号进行ISPSO_MCKD算法处理,适应度函数式(6),β的取值为β3=0.4,β4=0.6,经过对MCKD算法参数进行寻优,得滤波器长度L=498,解卷积周期T=142,位移数M=8,处理后图形如图7所示。
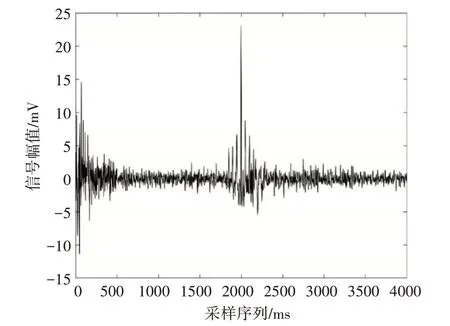
图7 预处理后真实数据经MCKD处理结果图
可提取采样序列峰值点,其采样序列坐标为1996,将像元离散化后对应亚像元峰值点,再通过亚像元偏移补偿,转化为位移量等步骤即可得到位移量。
6 结语
本文提出了一种粒子种群数与迭代次数相结合得动态更新种群学习率的策略,改进了粒子群算法和简化粒子群算法,提出的ISPSO算法拥有更快的收敛速度,精度较之PSO减小不大。对于需要快速收敛、参数要求严格的场合,ISPSO更适用。同时,将算法应用于激光位移传感器信号亚像元峰值提取相关算法参数寻优,验证了该算法的可行性。
目前,该算法已成功应用于基于激光位移传感器的汽车前束角的检测与调整相关算法参数寻优,激光测量汽车前桥前束角系统构架如图8所示。

图8 IPSO_VMD_MCKD用于汽车前束角检测图
系统通过伺服电机驱动滑轨,利用激光位移传感器测量位移,利用VMD与MCKD处理后,测得同一轮毂两点距离,通过计算即可得到汽车前束角。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
今日农业(2022年15期)2022-09-20
昆明医科大学学报(2022年1期)2022-02-28
湖南电力(2021年1期)2021-04-13
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
郑州大学学报(工学版)(2018年2期)2018-04-13
中学生物学(2018年8期)2018-03-01
浙江工业大学学报(2017年5期)2018-01-22
舰船电子工程(2010年1期)2010-04-26