基于视觉导航的变电巡检智能优化模型
2023-01-06 04:14陈立斌
通信电源技术 2022年17期
陈立斌
(国网宜兴市供电公司,江苏 无锡 214200)
0 引 言
电网的规划建设及其在建设中多种现代化技术的引进,提高了现有变电站的自动化水平与智能化水平。为满足变电巡检工作要求,有关机构开发了巡检智能机器人,以此辅助单位机构执行巡检任务。但在深入研究中发现,主流的“五遥式”巡检模式仍无法及时、快速解决变电站作业现场的异常问题,尽管此种作业模式在很大程度上解决了变电站运行疏漏,降低了巡检作业的人力成本,但漏检、误检等现象仍屡见不鲜。目前,市场内较为主流的巡检智能模型,仍需要人工参与或辅助的方式完成巡检任务,但人工干预的过程会导致巡检行为受到参与者主观认知偏差的影响[1]。例如,在人工设定智能巡检路径后,人为的主观意识认定某区域不会出现设备故障与异常,从而忽视或忽略对此区域的安全检查。此外,早期的智能巡检还会在实际应用中存在巡检行为不规范、巡检路径非最优等问题。因此,本文将在现有设计成果的基础上,引进视觉导航技术,设计针对变电站巡检的智能优化模型,以期提高现有巡检作业模式的可靠度。
1 基于视觉导航的变电巡检智能优化模型设计
1.1 基于视觉导航的变电巡检导航线提取
为确保对变电站巡检工作的全面优化,应在开展相关研究前,引进视觉导航技术,提高变电巡检导航线提取效率。而提取变电巡检导航线的过程指在巡检环境中对执行巡检路径进行主动提取的过程,可以将此过程作为对图像分割处理的过程[2]。在分割时,将变电巡检线路中的设备作为“物体”,将环境中的其他内容作为“背景”,应用机器视觉技术对环境中RGB空间色彩进行转换,使巡检环境中的导航线模型转换成色调-饱和度-亮度(Hue-Intensity-Saturation,HIS)模型。
为确保提取结果具有高精度优势,可设定视觉导航的有效范围在30.0°~90.0°范围内,且视觉的变化不会随着空间场景的变化而发生变化[3]。在此基础上,对所提取内容的背景环境阈值进行设定,根据变电站巡检作业的需求,设定背景的有效阈值在0~180.0°之间。将所提取的导航线表示“1”,将导航线所在的背景表示“0”,选择场景中的中心线,按照从远到近、从中心到边缘的方式进行全局视觉导向检索,检索的过程计算公式为

式中:Energy表示变电巡检导航线视觉检索过程;C表示检索中的关键视觉特征节点;i表示横向检索节点;j表示纵向检索节点。按照上述方式进行变电巡检导航检索,获取在检索中的关键信息,实现基于视觉导航的变电巡检导航线提取。
1.2 设计变电巡检智能优化模型边界条件
完成上述研究后,考虑到变电巡检空间基于智能化认知角度是呈现二维效果的,而要实现对模型的构建,应进行变电巡检智能优化模型边界条件的设计[4]。使用清晰度较高的电荷耦合元件(Chargecoupled Device,CCD)摄像头,进行巡检路径信息的收集,建立巡检路径GRB空间目标结构,结构中G表示巡检作业现场环境的色度;R表示巡检作业环境的饱和度;B表示环境亮度。对GRB结构进行转换,使其成为一个三维视域下的空间结构,转换过程计算公式为

式中:γ表示巡检作业空间结构的三维表达方式。在转换过程中,归一化处理GRB结构,保证在二维巡检平面中的所有目标值在[0,1]范围内,在此基础上,设定空间目标值的2个分量,定义2个空间值的分量为S与H,此分量为智能优化模型的2个边界。计算分量为建模提供边界条件,计算公式为
式中:I表示空间维度。按照式(3)、式(4),计算得到S与H分量计算结果值,通过此种方式,确定变电巡检智能优化模型边界。
1.3 基于导轨融合的模型训练与变电巡检异常点标注
为确保对变电巡检工作的全面优化,应在完成上述设计后,采用融合变电站巡检有效轨道线的方式进行智能优化模型预设巡检路径的训练[5]。训练时,获取巡检路径中声波矢量,反馈得到异常声波的特征集合,通过此种方式生成一个巡检路径训练编码,按照编码顺序训练模型,此过程计算公式为

式中:D表示模型训练过程;i表示模型训练迭代次数;M表示样本矢量;d表示样本训练间距;n表示样本异常值输出量;X、Y表示样本的横向与纵向拓展过程。按照式(5)训练模型,将变电巡检导航线与线路中的相关信息以可变参数的方式输入模型,在模型中进行反复训练,输出异常数值,匹配异常数值对应的巡检路径节点,将其作为变电巡检异常点,使用计算机编码的方式对异常点进行标注[6]。通过此种方式,实现对变电站的智能巡检作业。
2 对比实验
为验证本文上述提出的基于视觉导航的优化模型在实际应用中是否能够实现对变电站的智能巡检,按照上述论述完成对模型的建立,并将其应用到某变电站当中,验证其使用性能。选择该变电站现有的基于物联网技术建立的巡检模型作为对照组,将本文提出的优化模型作为实验组,设置对比实验,对比2种模型的应用效果。选择变电设备故障运行的环境作为实验环境,如图1所示。

图1 户外变压器绕组变形
在实验过程中,选择将100帧帧长为230×120,帧速率为25 frames/s的现场画面图像作为2种模型的巡检对象。针对上述异常状态下的变电站进行巡检,根据巡检结果得出模型对异常干扰因素的抗干扰性能,并对比2种模型的巡检精度。选择将变电站在故障时放电位置定位精度作为巡检精度,其异常放电位置定位精度计算公式为

式中:δ表示异常放电位置定位精度;x表示异常放电位置实际水平方向坐标;x'表示模型得出的异常放电位置水平方向坐标;y表示异常放电位置实际竖直方向坐标;y'表示模型得出的异常放电位置竖直方向坐标。根据式(2),计算得出2种巡检模型的定位精度结果,如表1所示。
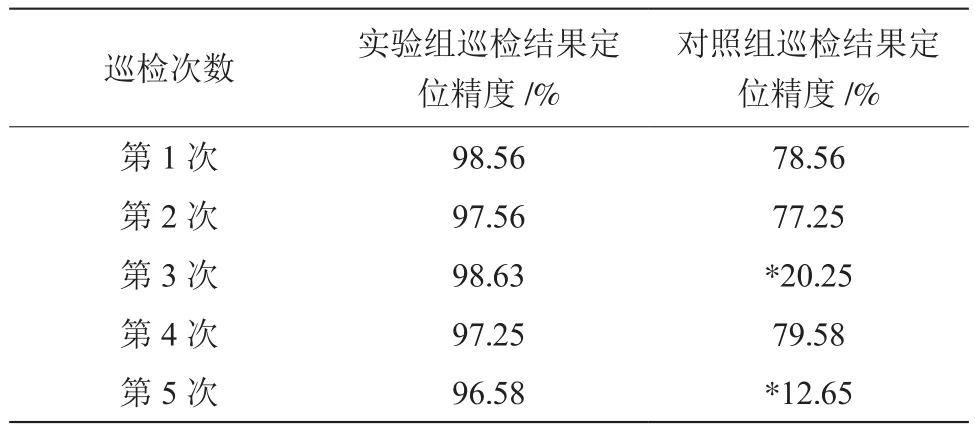
表1 实验组与对照组巡检结果定位精度对比
从表1中可以看出,实验组在5次巡检后得到的变电设备异常放电定位精度均在95.00%以上,而对照组巡检结果的定位精度仅能够控制在75.00%左右,同时在第3次和第5次巡检时,对照组的巡检结果定位精度出现了标号“*”后的数值,造成巡检结果严重不符合实际的问题产生,影响了巡检模型整体的运行精度。因此,通过上述得出的实验结果证明,本文提出的巡检智能优化模型能够实现对变电站的高精度智能巡检,并且能够自动绕开周围干扰因素,保证模型在运行中能够得到精度符合要求且稳定性更好的巡检结果。
3 结 论
为实现对变电站智能巡检工作的全面优化,提升巡检作业的水平与质量,本文从变电巡检导航线提取、设计变电巡检智能优化模型边界条件、基于导轨融合的模型训练与变电巡检异常点标注3个方面,完成了变电站巡检的智能优化模型的建立。为检验所设计模型的可行性,在完成对此模型的理论设计后,将其应用到某变电站企业中,展开对比实验研究。实验结果表明,本文提出的智能优化模型能够实现对变电站设备的高精度智能巡检,对变电设备异常放电定位精度均在95.00%以上,为变电站的安全运营提供了技术层面的指导与支持。
猜你喜欢
商品与质量(2021年43期)2022-01-18
科学与财富(2019年27期)2019-10-25
数码世界(2019年9期)2019-09-07
电子制作(2019年14期)2019-08-20
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
雷达学报(2017年1期)2017-05-17
电子制作(2017年20期)2017-04-26
电子制作(2016年21期)2016-05-17
电子制作(2016年21期)2016-05-17